1
ime
______________________________________________________________________________
SENZORI BRZINE I UBRZANJA
Seminarski rad
______________________________________________________________________ ________
2
Sadržaj:
Uvod............................................................................................................................................................................................... 73
Senzori brzine ........................................................................................................................................................................... 75
Senzori linearne brzine ......................................................................................................................................................... 75
Linearni promjenljivi diferencijalni transformator (LVDT) ......................................................... 75
Senzori brzine bazirani na Doplerovom efektu: ................................................................................ 77
Senzori ugaone brzine ........................................................................................................................................................... 79
Mjerenje ugaone brzine pomoću tahometara ..................................................................................... 79
Centrifugalni senzor ....................................................................................................................................... 80
Magnetni senzor ............................................................................................................................................... 81
Tahogeneratori ................................................................................................................................................. 82
Elektromagnetni senzori .............................................................................................................................. 84
Elektromagnetni senzor transformatorskog tipa .............................................................................. 84
Optoelektronski senzor................................................................................................................................. 85
Enkoderi .............................................................................................................................................................. 86
Apsolutni enkoder ........................................................................................................................................... 86
Inkrementalni enkoder ................................................................................................................................. 87
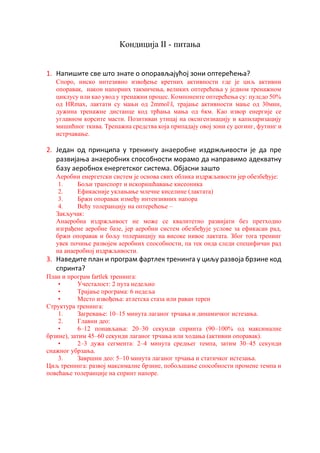
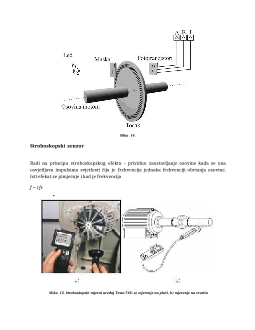
Stroboskopski senzor..................................................................................................................................... 88
Magnetorezistivni senzor ............................................................................................................................. 89
Senzori na bazi Holovog efekta.................................................................................................................. 90
Senzori ubrzanja ...................................................................................................................................................................... 91
Mjerenje ubrzanja korišćenjem pretvarača pomaka ....................................................................... 91
Piezoelektrični akcelerometri .................................................................................................................... 92
Piezorezistivni................................................................................................................................................... 96
Kapacitivni (diferencijalni): ........................................................................................................................ 97
Zaključak: .................................................................................................................................................................................... 98
Literatura: ................................................................................................................................................................................... 98

ul
az
na
v
el
ič
in
a
iz
la
zn
a
ve
lič
in
a
(a
n
al
o
g
na
/d
ig
ita
ln
a
)
4
Tako na primjer, temperaturni senzor termopar na promjenu temperature na ulazu
odgovara srazmjernom promjenom električnog napona na izlazu. Ovo pretvaranje se
može shvatiti u smislu mjerenja, jer je izlazna veličina ustvari mjera ulazne veličine –
mjerene veličine.
Postoji različiti nivoi realizacije senzora. Najčešće se oni pojavljuju samo kao pretvarači
signala, dok su ostali elementi, kao što je prilagođavanje i pojačavanje izlaza senz
ora, smješteni u drugom dijelu sistema kao posebne jedinice. Međutim, često je zajedno
sa pretvaračem signala u isto kućište integrisano analog no pojačalo,(
Slika 1
) u tom
slučaju takav senzor se naziva integrisani senzor. Ako je pored analognog pojačala u istom
kućištu smješten A/D konverter i mikrokontroler, onda takav senzor u skladu sa
softverom u mikrokontroleru (može da komunicira sa spoljnim svijetom i da samostalno
donosi neke odluke). Zbog toga se takav senzor naziva intiligentni senzor. Sa
napredkom mikroelektronike, te zbog masovne proizvodnje i njihove niske cijene, broj
inteligentnih
senzora stalno raste.
primarna
električna
veličina
analogni
signal
digitalni
signal
A
C
D
pretvarač-senzor
integrisani senzor
intiligentni senzor
analogno
pojačalo
Slika 1.
Senzori brzine
Senzori linearne brzine
Linearna brzina nekog objekta se definiše kao promjena vrijednosti puta i jedinici
vremena i predstavlja mjeru brzine kojom se objekat krece pravolinijski. Prema SI
sistemu jedinica za brzinu je metar u sekundi (
m/s
). Brzina je vektorska veličina i
definisana je pravcem smijerom i intenzitetom.
Linearni promjenljivi diferencijalni transformator
(LVDT)
LVDT (skraćenica od engleskog naziva: linear variable differential transformer) je senzor
visoke rezolucije kod kojeg je amplituda izlaznog AC napona srazmjerna linearnom
pomjeranju. Za razliku od potenciometra, ovaj senzor nema kontaktnu površinu, tako da i
pored malog mjernog područja (oko 5
cm
) ima široku primjenu u mnogim
sistemima, naročito tamo gdje je u pitanju registracija malih pomjeranja, koja su veća od
mikro područja.
Slika 2.
Sastoji se od trna - klizača koji je čvrsto spregnut sa dijelom sistema čije je
pomjeranje
postavljena tri namotaja, jedan primarni koji je postavljen na sredinu trna i dva
sekundarna namotaja na krajevima, Slika 2. Sekundarni namotaji imaju suprotan smjer
namotavanja. Kroz primarni namotaj protiče naizmjenična struja frekvencije do 10
kHz
,
čije magnetno polje se prenosi preko trna i u sekundarn im namotajima izaziva
indukovane struje koje, zbog različitog smjera namotavanja, imaju suprotne faze.
Amplituda napona indukovane struje zavisi od jačine polja u sekundarnim namotajima, što
opet zavisi od pomjeranja trna. Ako je trn u centru, onda su naponi
V
1
i
V
2
indukovani u
sekundarima iste amplitude i suprotne faze, tako da je njihov zbir nula,
V
net
vidi Slika 2. c).
Razmotrimo šta se dešava ako se trn pomjeri lijevo ili desno. Ako se trn pomjeri
lijevo, tada je napon indukovan u sekundaru 1 po amplitudi veći od napona
indukovanog u seku ndaru 2, što uslovljava da je njihov zbir različit od nule i ima fazu kao
sekundar 1, Slika 2. b). Slično, ako se trn pomjeri desno od centra, onda je napon
V
2
po
amplitudi veći od
V
1
,
što čini da njihov zbir nije nula, i da ima fazu kao napon,
V
2
Slika 2.
d). Dakle, od veličine pomjeranja trna zavisi amplituda rezultujećeg napona, a od njegove
faze zavisi smjer kretanja trna.
Oblik rezultujećeg napona
V
net
koji je mjera pomjeranje, u obliku koji se dobija sa
LVDT/RVDT nije podesan za korišćenje u ostalim dijelovima mehatroničkog sistema. To
se prevazilazi pretvaranjem izlaznog napona LVDT/RVDT senzora u
±
DC napon čija je
vrijednost srazmjerna amplitudi, a predznak fazi napona
V
net
. Za to se koriste posebno
razvijena integrisana kola. Jedno od njih je AD698 proizvođača
Analog Devices
čija je blok
šema data na Slici 3.
Slika 3.
Ovo kolo sadrži oscilato r napona primarnog namotaja, fazno osjetljivog ispravljača
(koji ispravlja napon
V
net
), filtra i pojačala. Na izlazu pojačala je ±DC čija
vrijednost je srazmjerna pomjeranju, a znak smjeru pomjeranja.