AUTOMATIKA I ROBOTIKA
Student:
Zoran Žigić
Broj indeksa: MPT 30/16
Zrenjanin, 2017 godina
Predmetni profesor:
doc. dr Vladimir Šinik
Univerzitet u Novom Sadu
Tehnički fakultet »Mihajlo Pupin«
Zrenjanin
Uvod
ž
(
,
,
Imajući u vidu slo enost zadataka koje robot obavlja zavarivanje farbanje
ž
š
,
ž
.),
opslu ivanje alatnih ma ina monta a dijelova u sklopove i sl
te potrebu
,
brzog prilagođavanja novim radnim zadacima osnovni preduslov uvođenja
industrijskih robota u proizvodne sisteme jeste mogućnost reprogramiranja
.
njegovog rada
š
.
Kako bi izvr io potrebnu korisnu radnju robot mora biti programiran
š
š
Robotskim se programom najče će defini e trajektorija koju sledi prihvatnica
(
.
-
),
robota engl end effector
kao i robotsko delovanje kojim se omogućuje
.
š
izvođenje kompletnog radnog ciklusa Kod novijih generacija robota sve vi e
,
,
se nastoji umesto programiranja kretanja programirati radni zadatak kojeg
.
robot treba obaviti
Upravljanje “tačka po tačka” (PTP)
“
”
š
Kod robota tipa tačka po tačka trajektorija prihvatnice se defini e
nizom tačaka koje se nalaze na trajektoriji preko kinematike upravljanih ili
.
vanjskih koordinata
Ukoliko se trajektorija definira preko vanjskih
,
,
,
koordinata
upravljačka će jedinica
primenom inverzne kinematike
.
izračunati odgovarajuće upravljane koordinate
Š
š ž
,
to je veći broj tačaka kojima se defini e eljena trajektorija to će
.
,
kretanje prihvatnice biti tačnije S druge strane veći broj tačaka znači i
,
veći broj potrebnih izračunavanja a njihov maksimalan broj određen je
ž
.
,
raspolo ivom memorijom upravljačke jedinice Između definisanih tačaka
,
ž
ovisno o tipu robota kretanje prihvatnice mo e biti realizovano na različite
,
š
.
načine kao to je prikazano na sl
1.
Slika 1. Načini kretanja prihvatnice kod PTP programiranja
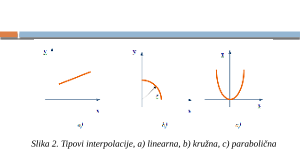
Slika 2. Tipovi interpolacije, a) linearna, b) kružna, c) parabolična