1
11. Dinamika tačke
Dinamika je deo mehanike koja se bavi pruočavanjem kretanja tela, ali uzimajući u obzir i uzroke tog
kretanja. Dinamika se deli na : dinamiku tačke i dinamiku sistema.
11.1.1. Dinamika tačke
PODSETNIK :
Materijalna tačka je telo zanemarljive veličine, u odnosu na puteve koje prolazi
Prvi Njutnov zakon →∑
⃗⃗⃗⃗⃗
= 0 → telo miruje
Drugi Njutnov zakon →
⃗⃗⃗
= m∙a ; m
= ∑
⃗⃗⃗
a+
⃗⃗⃗⃗⃗
Treći Nutnov zakon →
21
= -
12
Četvrti Njutnov zakon →
= k
, K = 6.67 ∙
∙
Dinamika ima dva zadatka :
1.
Na osnovu poznate jednačine kretanja , treba naći silu koja deluje na tačku . Zato se vrši
diferencirenje jednačine kretanja ,
2.
Poznata sila ( rezultanta sila ) koja deluje na materijalnu tačku zadate mase, treba naći jednačine
kretanja . U ovom se slučaju vrši integracija.
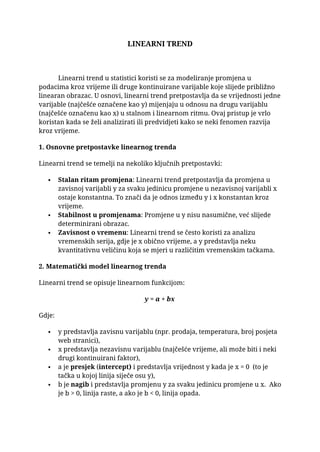
11.2. PRAVOLINIJSKO KRETANJE MATERIJALNE TAČKE
Da bi se tačka kretala pravolinijski potrebno je da sile deluju duž ose kretanja tačke .
Y
M
d
⃗⃗⃗⃗
=∑
⃗⃗⃗⃗
X
Slika 46
Po drugom Njutnovom zakonu važi :
ma
x =
∑
= χ
r
m
= m
̈
=∑
m
̈
=∑
– diferencijalna jednačina kretanja tačke
Imamo dva slučaja – da sila zavisi od vremena i da sila zavisi od položaja tačke .
2
11.2.1. Sila zavisi od vremena ili je konstantna
Ako sila zavisi samo od vremena, tada se diferencijalna jednačina piše u obliku:
m
̇
= Xr(t) ; m
̈
=Xr(t)
Integracija se može sprovesti :
odgovarajućim granicama
neodreĎenim integralom sa dve proizvoljnije integracione konstante C
1 i
C
2
, koje se odreĎuju iz početnih
uslova kretanja : za t=0,
̇
= x
0
, X
0
= V
0
, X=X
0
a)
∫ ̇
̇
̇
=
∫ ( )
m
̇
=mX
0
=Ø(t)Ď
m
̇
-m
̇
=Ø(t)
m
̇
=Ø(t)+m
̇
̇
=m
̇
+
∙Ø(t)
̇
=
̇
+
Ø(t)= V
0
+
Ø(t)
b) m
∫ ̇
=
∫ ( )
1
m
̇
=Ø(t)+C
1
OdreĎivanje koeficijenata C
1
radi se iz početnih uslova kretanja.
̇
=
=V
0
+
Ø(t)
=V
0
+
Ø (t)
dx=V
0
dt +
Ø(t)
a)
∫
V
0
∫
+
∫ ( )
X=X
0
+ V
0
∙t+
Ψ(t)
b)
d
̇
=
∫ ( )
1
m
̇
=Ø(t) +C
1
m
=Ø(t) +C
1
m∙dx= Ø(t)dt+C
1
∙dt
dx=
Ø(t)dt+
dt
mdx=Ø(t)+ C
1
dt
m
∫
=
∫ ( )
1
dt+C
2
mx=Ψ(t)+C
1
∙t+C
2
Ako je sila konstantna, Xr= const.
m
=Xr
11.2.2. Sila zavisi od položaja tačke
U ovom slučaju , Xr=Xr(x), onda se drugi izvod piše u takvom obliku koji će omogućiti razdvajanje
promenljivih u diferecijalnoj jednačini kretanja.
=
̈
=
̇
=
̇
̇
= N∙
m
̈
= Xr(x)
*
̇
̇
̇
+
koristimo
m
̇
̇
=Xr(x)