SVEUČILIŠTE U SPLITU
POMORSKI FAKULTET
IVICA MARTINIĆ
SEMINARSKI RAD
GREŠKA AZIMUTA BRODSKIH RADARA
SPLIT, 2018.
SVEUČILIŠTE U SPLITU
POMORSKI FAKULTET
STUDIJ: POMORSKA NAUTIKA
SEMINARSKI RAD
GREŠKA AZIMUTA BRODSKIH RADARA
Kolegij: Upravljanje navigacijskim i nadzornim sustavima
Mentor: Izv. prof. dr. sc. Zvonimir Lušić
Student: Ivica Martinić (MB: 0018084208)
SPLIT, 2018.
1
1. UVOD
U ovom seminarskom radu obrađena je tema grešaka azimuta brodskih radara.
Pogreške prisutne u podatcima prikazanim na radarskom ekranu utječu na donošenje odluka
u navigaciji. Navigator stoga mora imati znanje o razinama točnosti koje se mogu očekivati i
o pogreškama koje mogu utjecati na tu točnost. Samu točnost nije lako ocijeniti zato što ona
ovisi o mnogo faktora.
U prvom dijelu rada prikazane su pogreške u mjerenju azimuta, njihov nastanak te
njihov utjecaj na donošenje odluka. Opisane su greške raznih aspekata mjerenja i njihov
utjecaj na točnost sustava.
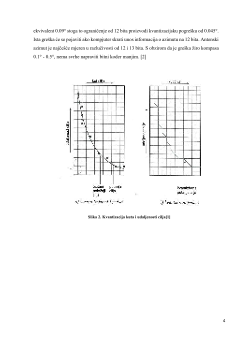
U drugom dijelu analizirani su podaci dobiveni od broda Golar Frost koji se nalazi
na Dampier sidrištu. Oficiri u brodskim stražama su uzimali azimute pomoću radara Furuno
Marine Radar Far-2807, a na Cape Leveque svjetionik. Ovdje je prikazana analiza 20
izmjerenih azimuta na taj objekt po lijepom vremenu.
2
2. POGREŠKE U MJERENJU AZIMUTA
Ove greške uzrokuju pogreške u mjerenju pozicije s obje strane relativne staze
drugog broda, dovodeći do grešaka promatrane relativne staze i zbog toga i predviđenog
CPA i isto i prikazanih podataka drugog broda. Greške azimuta mogu poteći od sljedećih
uzroka:
Prazni hod opreme
Prazni hod se može pojaviti između rotirajuće antene i odašiljača azimuta. Otpor
zraka ima tendenciju zadržati zub zupčanika rotirajuće antene, ali odskočni i okretni moment
tokom sile aerodinamike prekinut će kontakt i dopustiti da se dogodi prazni hod. Ovaj
problem je riješen kad je uveden moderni oblik prijenosa.
Nestabilna platforma i nagib antene
Brodsko gibanje uzrokuje da os rotacije radarske antene nagne. Kad je brod nagnut
pod kutom B radijana, greška azimuta od –(½ B² sin
θ
cos
θ
)
radijana je pruzročena, gdje je
θ
azimut cilja pramca vlastitog broda. Pogreška je kvadratalna, a kad se brod valja nagib ima
dvije komponente, nasumičnu varijacija između nule i maksimalnu prema vrijednosti B
(stvarni kut valjanja koji je prisutan kad je antena direktno na nosaču) i uspon i pad
maksimuma u periodima od jedne ili dvije minute s varijacijama ovisno o visini vala. Za
relativni azimut od 45° i valjanje od 7.5° prema ili od drugog broda, maksimalna je pogreška
od -0.25°.
Paralaksa zbog valjanja broda
Ako je radarska antena montirana na visini H iznad osi rotacije broda i valjanje
broda je pod kutom B, antena se pomiče transverzalno po H sin B. Izmjereni azimut cilja u
azimutu
θ
s prednjeg dijela broda pod kutom R bit će pod pogrešan za kut e koji je dan
izrazom
tan
(
e
)=
H
sin
B
R
× cosθ
Napomena je da H i R moraju biti u istim jedinicama, a
θ
je relativni azimut.