ASINHRONE MAŠINE
1. UVOD
Trofazne asinhrone mašine su najčešće koriš-
ćene električne mašine u mnogim granama
industrije. Karakterišu ih niska cena, visoka
pouzdanost, dobar stepen iskorišćenja, lak
polazak i vrlo niski zahtevi održavanja.
Ista mašina može da radi kao motor i kao
generator, a radni režim zavisi jedino od toga
da li se mehanička energija dovodi ili odvodi.
Asinhrone mašine najčešće rade kao motori.
Asinhroni motori se tipično proizvode za
manje i srednje snage (od 0,55 do 22
kW
) u
vrlo velikim proizvodnim serijama.
Kad se napajaju iz NN mreže, asinhroni
motori lako startuju i zatim rade brzinom
definisanom konstrukcijom namotaja, a koja
se vrlo malo menja sa promenama
opterećenja (tvrda mehanička karakteristika).
2. KONSTRUKCIJA
Kao i sve rotacione električne mašine,
asinhrone mašine imaju dve grupe delova:
stator i rotor.
Stator se sastoji od sledećih komponenti:
1. statorski namotaj, najčešće trofazni,
postavljen u žljebove magnetnog kola
statora,
2. magnentno kolo statora, u obliku šupljeg
cilindra, napravljeno od tankih tzv.
dinamo-limova koji su sa jedne strane
lakirani radi električne izolacije i zatim
složeni u paket. Na unutrašnjem obimu
postoje aksijalni žljebovi u koje se
postavlja namotaj.
3. kućište, koje se sastoji od:
-
glavnog kućišta, u obliku šupljeg
cilindra, koje sa unutrašnje strane drži
magnetno kolo, a sa spoljne strane ima
rebra za povećanje hlađene površine,
-
dva nosača ležajeva sa ležajima, a često
i poklopac ventilatora sa jedne strane.
-
priključnu kutiju, u koju se izvode
počeci i krajevi namotaja statora,
-
noge i/ili prirubnicu za ugradnju,
-
prsten za kuku za prenošenje,
-
natpisnu pločicu,
4. moderni motori često imaju senzor
pozicije i/ili brzine, koji omogućuju
praćenje brzine obrtanja tokom rada i
daju mogućnost automatskog upravljanja
motorom u pogonu..
Rotor ima sledeće delove:
1. rotorski namotaj u žljebovima rotora, koji
može biti:
-
trofazni namotaj čiji su krajevi spojeni
u zvezdu a počeci izvedeni na klizne
prstenove (kliznokolutne mašine),
-
polifazni kavez od aluminijumskih ili
bakarnih šipki čiji su svi počeci spojeni
jednim a krajevi drugi provodnim
prstenom (kavezne mašine).
2. magnetno kolo sa aksijalnim žljebovima
na spoljnom obodu za smeštaj namotaja,
3. vratilo,
4. ventilator koji obezbeđuje hlađenje.
Kliznokolutni motori imaju klizne prstenove
na rotoru i tri grafitne četkice na statoru,
kojima se omogućuje električni pristup
namotaju rotora. Ovaj sistem služi da se
dodatnim otpornikom u kolu rotora prevaziđu
problemi pokretanja i da se obezbedi
regulacija brzine. Kompleksnost ove
konstrukcije i nizak stepen iskorišćenja pri
regulaciji brzine imaju za posledicu visoku
eksploatacionu cenu te se ove mašine danas
vrlo retko koriste.
Kavezni motori su jednostavne i vrlo robusne
konstrukcije. U uobičajenoj IP 55 izvedbi,
otporni su na vodu i prašinu. Redovna
održavanja su znatno ređa i manjeg obima u
odnosu na druge vrste mašina. Uz pravilnu
upotrebu, vek motora je praktično određen
vekom ležajeva rotora. Nema četkica, pa
51
mogu da rade u čistim (prehrambena,
farmaceutska, hemijska i slične industrije) ili
u eksplozivnim sredinama (petrohemija,
hemijska industrija, itd.) Asinhroni motori
mogu biti konstruisani u IP 67 ili IP 68
izvedbi, što znači da normalno rade
potopljeni u vodi ili nekoj drugoj tečnosti.
3. RAD I OSNOVNE JEDNAČINE
3.1. Princip Rada
Kada se na stator postave tri namotaja (svaki
sa više navojaka) prostorno pomerena za po
120°
i kada se kroz njih propuste sinusoidne
struje istih amplituda i frekvencija ali
vremenski pomerene za po trećinu periode
(fazni pomeraj je po 120°), magnetopobudne
sile ovih namotaja će oformiti obrtno
magnetno polje.
Obrtno magnetno polje je (u idealnom
slučaju) po unutrašnjem obimu statora (a
time i po obimu zazora i po spoljašnjem
obimu rotora) prostorno raspodeljeno po
sinusnom zakonu tako da formira magnetne
polove. Polje ima konstantnu amplitudu u
centrima svakog magnetnog pola, definisanu
brojem navojaka, jačinom struje i dužinom
zazora, ali se maksimumi i minimumi (tj.
severni i južni polovi) vremenski pomeraju
po obimu zazora, tj. u prostoru.
Brzina obrtanja polja naziva se sinhrona
brzina i definisana je frekvencijom napajanja
f
i brojem pari magnetnih polova
p
. Izražava
se u obrtajima u minuti kao:
n
s
= 60
f / p
(1)
Pri mrežnom napajanju frekvencije 50
Hz
sinhrone brzine su:
Broj pari
magnetnih
polova
1
2
3
4
Sinhrona
brzina
[
o/min
]
3000
1500
1000
750
Rotor asinhrone mašine obrće se brzinom
n
koja je različita od sinhrone brzine obrtnog
polja. Stoga se u namotaju rotora indukuju
elektromotorne sile (naponi). Pošto su
namotaji rotora kratko spojeni, ovi
indukovani naponi prouzrokuju struje u
svakoj šipki rotorskog kaveza. Ti provodnici
sa strujom nalaze se u obrtnom polju pa
proizvode mehaničke sile, a pošto su
provodnici postavljeni po obodu rotora (van
centra rotacije), proizvode mehanički
moment sile. Kada je mašina povezana sa
radnom ili pogonskom mašinom određenog
momenta, u stacionarnom radnom režimu
mašina radi na tačno takvoj brzini pri kojoj je
razvijeni elektromagnetni moment tačno
jednak momentu radne mašine – to će biti
stacionarna radna tačka pogona. Ako bi se
rotor obrtao tačno sinhronom brzinom, ne bi
bilo indukovanih napona niti struja u
namotaju rotora a time ne bi bilo ni
razvijenog momenta.
Kada mašina radi kao motor, ugaona brzina
obrtanja rotora je niža od sinhrone, a kada
radi kao generator je veća od sinhrone. U
motorskom režimu razvijeni moment je istog
smera kao i smer obrtanja rotora, a radna
mašina se protivi obrtanju. U generatorskom
režimu rada razvijeni moment je suprotnog
smera od smera obrtanja.
Razlika između brzine obrtanja rotora i
sinhrone brzine naziva se klizanje. Klizanje
se ponekad izražava u apsolutnim
jedinicama,
o/min
, a češće u relativnim
jedinicama odnosno u procentima, koji su u
odnosu na sinhronu brzinu definisani kao:
s =
(
n
s
n
)
/ n
s
(2)
s
[%] = 100 (
n
s
n
)
/ n
s
(3)
Klizanje jednako nula predstavlja sinhronu
brzinu, a klizanje od jedan (100%) označava
mirovanje (zakočenost) ili sam trenutak
polaska. U nominalnom režimu klizanje
asinhronih mašina kreće se od 10% za
motore vrlo male snage do ispod 2% za
motore vrlo velikih snaga. Kad rade u
generatorskom režimu, klizanje je od -10%
do -2%.
Razvijeni moment motora menja se sa
brzinom te se za svaki motor daju ili cela
mehanička karakteristika (dijagram moment-
brzina) ili tri karakteristične vrednosti:
nominalni, polazni i prevalni (maksimalni)
moment.
52

M
maksimalni (prevalni) moment
,
M
pr
M
pol
M
n
oblast
normalnog
rada
klizanje
1
s
pr
s
n
0
0
n
s
brzina
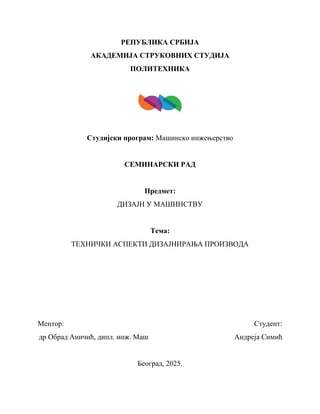
Slika 2: Momentna karakteristika asinhronog
motora pri nominalnom naponu napajanja.
Treba još naglasiti da će preopterećenje na
vratilu koje je veće od prevalnog dovesti do
zaustavljanja pogona, jer motor ne može da
proizvede tako velik moment.
3.4. Polazak i Zalet
Za praktičnu primenu asinhronih motora,
poželjne su dobre startne osobine - visok
polazni moment i umerena polazna struja. Pri
uključenju na mrežu nominalnog napona,
tokom ubrzavanja motori povlače iz mreže
struju koja je tipično 6 puta veća od
nominalne struje, što predstavlja strujno i
naponsko naprezanje za mrežu (pogotovo
kod velikih motora), kao i termičko
naprezanje za sam motor. Standardni
asinhroni motori su konstruisani tako da
proizvode bar 150% nominalnog momenta
pri polasku, vidi sliku 5.3. u zadatku 5 Ovim
je omogućen relativno kratak zalet, čime se
dobija kratko trajanje velikih startnih struja,
pa je opasnost od pregrevanja smanjena.
Specijalni motori proizvode preko 200%
momenta pri startu.
Priroda konstrukcije asinhronih motora je
takva da se malo klizanje, visok prevalni
moment, visok stepen iskorišćenja i dobar
faktor snage postižu na uštrb velike polazne
struje i relativno niskog polaznog momenta.
Konstruktori motora moraju da kod kaveznih
motora prave kompromis – kod motora male
snage se ide na bolje polazne karakteristike, a
kod većih motora na malo klizanje i visok
stepen iskorišćenja. Da bi se kod motora
većih snaga dobile i povoljne polazne
karakteristike, modifikuje se konstrukcija
rotora. Dve česte konstrukcije su dvostruki
kavez (jedan kavez preovladava pri startu a
drugi pri normalnom radu) ili duboki žljebovi
na rotoru, čime se na pozitivan način
iskorištava efekat potiskivanja struje.
Za srednje i velike motore, strujni i naponski
udar prema mreži je relativno jak pa se
primenjuju razni elektronski sistemi za tzv.
“meki start”.
54
16. Zadatak:
Trofazni asinhroni motor radi opterećen nominalnim momentom. Odrediti brzinu
obrtanja pri podizanju i pri spuštanju tereta u dizaličnom pogonu.
Podaci o motoru:
p =
3 ,
f =
50 Hz ,
s
n
= 3
.
REŠENJE:
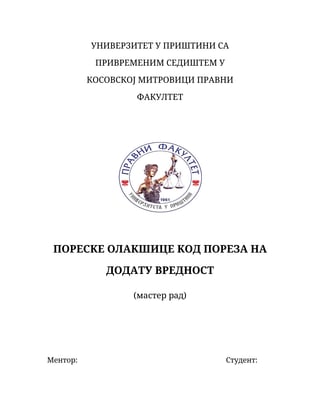
Slika 16.1: Momenti na vratilu
motora pri dizanju tereta.
U svakom elektromotornom pogonu kretanje je posledica
dva međusobno suprostavljena momenta: električni,
motorni, pogonski (
m
e
) i mehanički, kočni, moment
opterećenja (
m
m
), slika 16.1. U dizaličkom pogonu
moment opterećenja je posledica delovanja gravitacione
sile
g
na teret mase
m.
Teret će se pokrenuti ako je motorni moment veći od
momenta opterećenja, a podizaće se ravnomernom
brzinom kada su ovi momenti jednaki. Smerovi momenata
i ugaone brzine prikazani su na slici 16.1. Sa iste slike se
vidi da moment konverzije asinhronog motora deluje u
smeru obrtanja bubnja za koji je zakačen teret, a moment
opterećenja
m
m
se suprostavlja kretanju pogona. Za ovaj
režim važi
;
m
e
> 0,
m
m
> 0, a asinhrona mašina radi
u motorskom režimu rada.
a.
)
Da bi asinhrona mašina mogla da radi tj. da bi se rotor mogao obrtati, mora se obezbediti
indukovani napon tj. struja u namotajima rotora. To se može ostvariti jedino ako se rotor
asinhrone mašine obrće sporije od Teslinog obrtnog polja u zazoru, koje stvara statorski namotaj.
Obrtno polje ima sinhronu brzinu
n
s
, a brzina rotora u motorskom režimu rada je
n
. Razlika
između ovih brzina naziva se klizanje (
s
), i predstavlja relativnu vrednost brzine rotora u odnosu
na brzinu statorskog obrtnog polja. Uobičajeno je u literaturi i inžinjerskoj praksi da se koristi
relativna vrednost klizanja u odnosu na sinhronu brzinu, i da se pojam
relativno
podrazumeva
pa se i izostavlja, tako da se upotrebljava termin klizanje, definisano kao:
(16.1)
Klizanje se izražava i u procentima:
(16.2)
Sinhrona brzina
n
s
izražava se brojem obrtaja u minuti a sinhrona ugaona brzina brojem radijana
u sekundi. Ove brzine zavise od frekvencije napajanja i od broja pari polova namotaja statora:
(16.3)
(16.4)
Vrednosti sinhrone brzine za frekvenciju od
f
=50 Hz i različit broj pari polova
p
su date u tabeli:
p
1
2
3
4
n
s
[
o/min
]
3000
1500
1000
750
s
[
rad/s
]
314,16
157,08
104,72
78,54
55

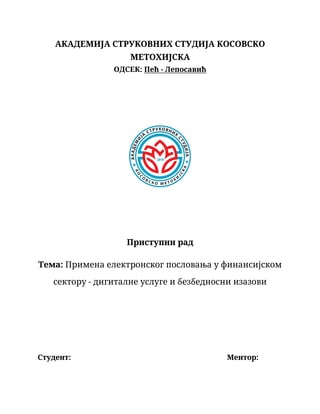
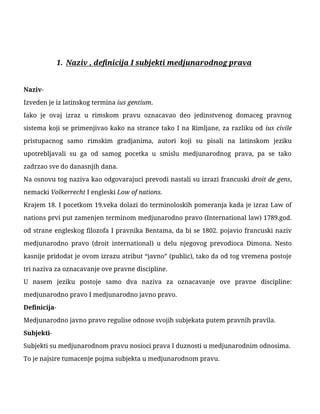
Slika 16.2: Radne tačke dizaličnog pogona na mehaničkoj karakteristici motora
Na slici 16.2 prikazana je mehanička karakteristika motora i karakteristika opterećenja
m
m
.
Karakteristika opterećenja je konstantna, i ne zavisi od brzine ni po iznosu ni po smeru - uvek se
podiže i spušta isti teret. Radna tačka podizanja tereta označena je sa
A
, a radna tačka spuštanja
tereta označena je sa
B
. Ovde je potrebno obratiti pažnju na izgled izlazne mehaničke
karakteristike motora pri promenjenom smeru obrtnog magnentnog polja.
57