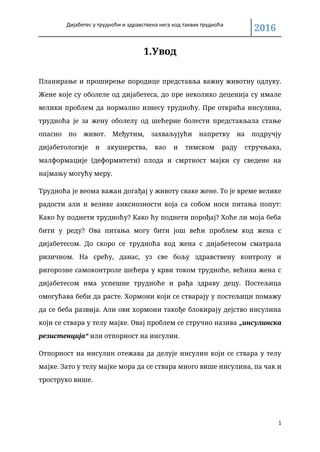
Slika 7.5. Koncept automatiziranja sistema proizvodnje
Automatizirane mašine u pravilu danas imaju neki računar na kojem teče neki sistem programiranja
primjene pomoću kojega se mogu unaprijed dati mašini radni tokovi. Tipični primjer za takve mašine
su numerički upravljane alatne mašine ili industrijski roboti.
Inteligencija je sposobnost nekog sistema da dostigne ili održi neki cilj, neko ponašanje ili neko
određeno unutarnje stanje kod nailaska neodređenih stanja unutar ili izvan sistema
Čvrsto programirane mašine mogu vršiti samo jednoznačne radne upute. Protivno tome inteligencija
kod mašine ne znači ništa više nego sposobnost da se može na takve situacije samostalno prilagoditi,
pojava tih situacija je u pravilu dosta visoko vjerovatna ali se uvijek nemože ekzaktno unaprijed
planirati.
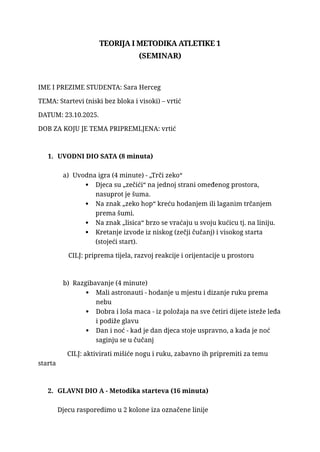
Slika 7-7: Principi djelovanja a) upravljanje b) regulacija
Kako se vidi u slici 7-7 a) postoji upravljanje iz
otvorenog lanca djelovanja (lanac upravljanja)
. Sa
lijeva je u upravljanje dat ulazni signal Xe iz kojega ovaj proizvodi
signal podešenja
Xs da bi sistem
koji upravlja, uveo definirane dinamičke promjene izlazne veličine Xa.
Na slici 7-7 b), bitne komponente su kao i kod upravljanja, uređaj regulacije (
regulator
) i sistem koji
treba regulirati koji se takođe često označava kao linija regulacije. Željeno dinamičko ponašanje
Rukovaoc uređaja ili vodeći
računar proizvodnje
Automatiziranje odnosno nivo
vođenja procesa
(numeričko upravljanje, memorijski
upravljano programiranje,
mikroračunari)
Sistemi proizvodnje
(alatna mašina , industrijski roboti)
Povratna obavijest informacije
(pokazivanje položaja,
obavijesti)
Davanje informacija
(programi primjene, ručni
zahvati)
Vrijednosti
mjerenja
Vrijednosti
podešenja
Sirovina, energija,
informacija
Proizvod, energija,
informacija
Uređaj upravljanja
Linija
Uređaj regulacije
Linija
x
e
x
s
x
a
x
d
w
x
-
a)
b)
x
Povratna veza
stvarna vrijednost
Zadata
vrijednost
Zadata/stvarna vrijednost-poređenje
izlazne veličine X linije regulacije (
veličina regulacije
) unaprijed je zadata ulaznom veličinom W
(
vodeća veličina, zadata vrijednost
). Ako na liniju regulacije djeluju nepredviđene smetnje, tada se
željena zavisnost između zadate vrijednosti i veličine reguliranja (stvarne vrijednosti) sa otvorenim
lancem djelovanja kao kod upravljanja, nebi više održala.
Poređenje se vrši time da se od zadate vrijednosti odbije stvarna vrijednost čime se stvara takozvana
razlika regulacije.
U idealnom slučaju, u kojem veličina regulacije ne odstupa od zadate vrijednosti, razlika regulacije
jednaka je nuli i ukupan sistem iz regulatora i linije je u stabilnom stanju.
Nastupi li kroz vanjske smetnje ili takođe kroz unutarnja kolebanja neko odstupanje regulirane
veličine od zadatoga stanja, tada razlika regulacije poprima vrijednost koja odstupa od nule.
Kako se odstupanje regulacije dovodi u regulator, ako ovaj „vidi“ da je došlo do odstupanja i na to
reagira na način da promijeni svoju izlaznu veličinu,
vrijednost podešenja y
. Time se veličina
regulacije više ili manje brzo vraća u staro stanje.
Takvi programi u tu svrhu izvode sljedeće korake:
1. Mjeri vrijednosti svih varijabli koje predstavljaju ponašanje sistema pomoću senzora.
2. mjerne vrijednosti sa zadatim vrijednostima.
3. Ako postoji odstupanje regulacije, tada odluči koja preduzeta mjera može minimizirati
odstupanje.
4. Provodi potrebna mjerenja
5. Vraća se na korak 1), to radi povratnom vezom.
Regulacija je postupak, kod kojeg će se predhodno data vrijednost neke veličine trajno operacijom
stvarati i održavati na osnovu mjerenja. Ovim nastaje tok djelovanja koji se vrši u zatvorenom krugu
(krug regulacije), jer se postupak odvija na osnovu mjerenja neke veličine na koju opet sam postupak
utiče. Ovaj krug djelovanja naziva se krug regulacije.
Regulacija nekog dinamičkog sistema uvijek će se koristiti kada model sistema sadrži analogne
veličine i postoji opasnost da sistem bude podvrgnut smetnjama ili kolebanju parametara. Samo kod
primjene vrlo jednostavnih binarnih komponenti model sistema je tako jednoznačan i malo podložan
smetnjama da se može primjeniti (princip upravljanja).
Skup jednačina koji opisuje ponašanje pojedinih komponenti sistema naziva se
matematičkim
modelom sistema.