0
FAKULTET ZA SAOBRAĆAJ I KOMUNIKACIJE
Seminarski rad iz predmeta:
Lokacijski i navigacijski sistemi
Datum: Maj, 2017
Tema rada:
Probabilističke metode pozicioniranja: Metoda kvadrata, metoda
prstenova, metoda krugova, Poređenje probabilističkih metoda
Student:
Usmjerenje:
Godina studija:
Rezultat rada:
3
1. Probabilistički pristup
Probabilistički pristup se bazira na probabilističkim modelima kojima se opisuje zavisnost
karakteristika signala koje prima mobilna stanica od lokacije mobilne stanice. Probabilistički
algoritmi tretiraju ulazne podatke o lokaciji mobilne stanice kao prostorne funkcije gustine
verovatnoće (uzimaju se u obzir sve neodređenosti mjerenih parametara), i združuju ih u cilju
poboljšanja procjene lokacije mobilne stanice.
Prednosti probabilističkog pristupa određivanju lokacije mobilne stanice su:
uvijek se dobija procjenjena lokacija MS (nema opasnosti od izostanka rješenja kao
što je slučaj kod rješavanja determinističkih sistema)
manja osjetljivost na uslove propagacije (rješenje se gotovo uvijek može dobiti za
razliku od determinističkih metoda; uslovi propagacije mogu uticati samo na
smanjenje tačnosti određivanja lokacije)
nema zahjteva za minimalnim brojem referentnih tačaka (baznih stanica), pa time i
bolja dostupnost od metoda pozicioniranja baziranih na determinističkom pristupu;
ipak, veći broj BS povećava tačnost pa je svakako poželjan
kao rezultat procjene lokacije MS može se dostaviti i zona u kojoj se procjenjuje
lokacija MS (koja se može ubaciti u odgovarajuću geografsku mapu).
Nedostaci probabilističkog pristupa su određivanju lokacije mobilne stanice su:
proračun lokacije MS primjenom probabilističkog pristupa može biti računarski
zahtjevan – metode pozicioniranja loše po pitanju parametra računarskog opterećenja
(što se u slučaju mobile-based metoda prenosi i na parametar energetske efikasnosti)
mogu se javiti znatno veći zahtjevi po pitanju memorijskog prostora u odnosu na
determinističke metode pozicioniranja
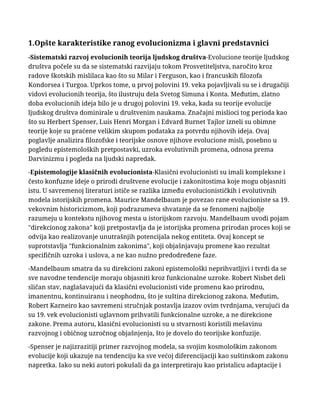
određivanje lokacije mobilne stanice kao matematičko očekivanje nekada može dati
apsurdan rezultat, tj. može procjeniti lokaciju mobilne stanice na mjestu na kojem se
mobilna stanica ni u kom slučaju ne može nalaziti (slika 1). Ipak, u opštem slučaju,
matematičko očekivanje predstavlja najbolji pogodak lokacije mobilne stanice.
4
Slika 1. Apsurdna procjena lokacije MS primjenom probabilističkog pristupa
1
2. Probabilističke metode pozioniranja
Postoje tri probabilističke metode pozicioniranja. U osnovi, sve tri probabilističke metode
pozicioniranja predlažu nove algoritme u cilju prevazilaženja nekih od nedostataka poznatih
determinističkih lateracionih metoda. Svaka od predloženih metoda kao rezultat daje oblast u
kojoj se predviđa lokacija mobilne stanice, dok se sama lokacija mobilne stanice unutar
pomenute oblasti određuje se primjenom probabilističkog pristupa, uz pretpostavku da
mobilna stanica unutar oblasti ima uniformnu raspodjelu.
Takođe, standardna devijacija koordinata dobijenih na ovaj način koristi se kao mjera
neodređenosti lokacije mobilne stanice. Primjena ovih probabilističkih metoda predstavljena
je na primjeru naprednije verzije Cell-ID+TA tehnike pozicioniranja u GSM, ali se
generalizacija može izvršiti na bilo koju drugu tehniku pozicioniranja.
Sve tri metode zasnovane su na informaciji o geografskim koordinatama baznih
stanica koje učestvuju u postupku određivanja lokacije mobilne stanice i odgovarajućim
vrijednostima TA parametara. Kao što se može vidjeti sa slike 2, informacija o geografskim
kordinatama bazne stanice i vrijednosti TA parametra ograničava zonu u kojoj se može
nalaziti mobilna stanica na prsten u čijem se centru nalazi bazna stanica a koji je definisan sa
1
http://www.etf.bg.ac.rs/etf_files/udzbenici/PPR.pdf
6
2.1.Metoda kvadrata
Metoda kvadrata nastala je sa ciljem da se pojednostavi prora
č
un lokacije mobilne
stanice. Neka bazna stanica indeksa
i
,
BS
i
, locirana na
(
X
BSi
,Y
BSi
)
, komunicira sa mobilnom
stanicom
č
ija se lokacija procjenjuje, pri
č
emu je vrijednost odgovaraju
ć
eg TA parametra
TA
i
.
Ova vrijednost TA parametra locira mobilnu stanicu unutar prstena.
Prsten definisan vrijednoš
ć
u TA parametra
TA
i
.
, svakako se nalazi i u okviru kvadrata
definisanog sa:
x
i min
≤ x
MS
≤ x
i max
y
i min
≤ y
MS
≤ y
i max
gdje je:
x
i min
=
x
BSi
−
(
TA
i
+
1
)
R
q
x
i max
=
x
BSi
+
(
TA
i
+
1
)
R
q
y
i min
=
y
BSi
−
(
TA
i
+
1
)
R
q
y
i max
=
y
BSi
+
(
TA
i
+
1
)
R
q
Samim tim, mobilna stanica se takođe nalazi u okviru istog kvadrata.
Ako u postupku pozicioniranja učestvuje
n
BS
različitih baznih stanica poznatih koordinata
(
X
BSi
,Y
BSi
)
odgovarajućih vrijednosti TA parametra
TA
i
,
i
=
1
, … , n
BS
, za svaku od
n
BS
baznih
stanica moguće je definisati zonu, tj. kvadrat, u okviru kojeg se može nalaziti ciljana mobilna
stanica.
Najzad, konačna zona u kojoj se procjenjuje lokacija mobilne stanice nalazi se u
presjeku tih kvadrata, tj. dodatno je redukovana na manju zonu oblika pravougaonika u
granicama kona
č
na zona u kojoj se procjenjuje lokacija mobilne stanice nalazi se u presjeku
tih kvadrata, tj. dodatno je redukovana na manju zonu oblika pravougaonika u granicama:
x
i min
≤ x
MS
≤ x
i max
y
i min
≤ y
MS
≤ y
i max
Gdje je:
x
min
=
max
1
≤ i ≤ n
BS
(
x
i min
)