Семинарски рад
Пројектовање електричних машина
и електромоторних погона
~ 2 ~
1 Увод
За претварање разних природних енергетских потенцијала у користан рад
користе се разне врсте мотора. Развојем електротехнике, производње и преноса
електричне енергије, као и развојем електромотора ониу индустрији заузимају
примат.
Први електромоторни погон остварио је Јакоби 1838.године, гонећи
једносмерним мотором напајаним из батерије, чамац са 14 особа по Неви у Санкт
Петерсбургу. Развој електромотора тече тако брзо да он потискује остале моторе где
год је то могуће. То је посебно повезано са применом трофазног наизменичног
система везаног за проналазак трофазног мотора Николе Тесле 1887.године. Године
1890 учешће електромотора у укупној инсталисаној снази свих мотора износи 5%.
Овај проценат се већ 1927. године повећава на 75%, и данас достиже преко 90%.
У почетку су се електромоторни погони остваривали помоћу једног
централног електромотора, при чему се енергија преносила трансмисијом,
каишевима, вратилима и слично.Због разних захтева појединачних радих машина,
почетком XX века фирма
,,Siemens“
уводи појединачне погоне са појединачно
независно напајаним моторима. Такав систем се и данас користи.
Од свих данас коришћених електромотора највећу примену је нашао трофазни
асихрони мотор (једноставне је конструкције, поуздан је у раду, има висок степен
искориштења, релативно ниска цена, идруго). Такође због својих карактеристика
доста се примењују и мотори заједносмерну струју.

Семинарски рад
Пројектовање електричних машина
и електромоторних погона
~ 4 ~
M
n
= 1.6
). Захтев за краткотрајним преоптерећењем условљава да се при таквим
преоптерећењима не мења век трајања мотора. Поједини захтеви за преоптерећењем
могу бити и преко 200[%] па чак и 300[%] од номиналне снаге мотора. Највећа
преоптерећеност мотора која се сматра нормалном (за веома кратка времена) је
400[%]. Веће преоптеретљивости представљају посебне проблеме у градњи мотора.
Поред карактера терета, на рад мотора битно утичу и утицаји околине, а то су:
1. Температура околине,
2. Надморска висина,
3. Места уградње ( због хлађења машине),
4. Утицаја влаге, воде и прашине,
5. Утицаја експлозивних гасова,
6. Хемијски агресивне средине,
7. Утицај вибрација,
8. И други утицаји.
По препорукама
IEC
степен електричне и механичке заштите је означен са
IP
и
одговара двоцифреним бројем (нпр.
IP 54
). Прва цифра означава степен заштите
делова под напоном од додира са страним телом, а друга заштиту од воде (тако
ознака
IP 54
подразумева заштиту од продора најситнијих честица прашине и
заштиту од прскајуће воде). Ова заштита битно утиче и на хлађење мотора јер је код
затворених мотора хлађење отежано и врши се са спољашње стране.
Температура битно утиче на век трајања ових мотора. При реаговању машине
изнад номиналне температуре може се у зависности од класе изолације, битно
смањити век трајања мотора, и пак изазвати кварове. Неопходно је повећање снаге
мотора, да би се избегло загревање, пак изазива непотребне губитке, слабо
искоришћење и поскупљење опреме.
3.2
Одређивање снаге елекромотора за разне врсте погона (према снази
машине)
Снага радне машине у појединомпогону одређена је према дефиницији снаге:
P
=
F ∙ v
(
3.1
)
Сила
F
и брзина
v
су условљене процесом рада и одређују се на основу захтева
процеса. Како су брзине мотора обично веће у односу на брзину обртања радног
механизма то се често користе одговарајући преносиоци. При механичком преносу
снаге појављују се и губици тако да је:
P
M
=
P
RM
+
p
PR
(
3.2
)
Семинарски рад
Пројектовање електричних машина
и електромоторних погона
~ 5 ~
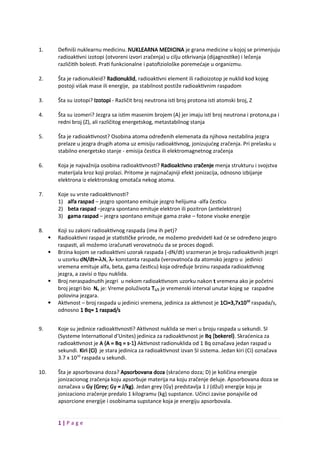
Слика 3.1
где је:
P
M
- снага мотора,
P
RM
- снага радне машине,
p
PR
- губици у преносном уређају.
4 Статичка стања електромоторних погона
4.1
Механичке карактеристике радних механизама
Момент терета радног механизма може зависити како од брзине обртања, тако
и од времена, пута, специфичности технолошких процеса итд.
Општа зависност радног механизма од брзине обртања дата је изразом:
M
t
=
M
o
+
(
ψ M
tn
−
M
o
)
∙
(
ω
ω
n
)
γ
(
4.1
)
где је:
M
t
-момент терета,
M
o
-момент трења,
Ψ
-фактор оптерећења,
M
tn
-номинални момент радног механизма,
- тренутна угаона брзина,
n
– номинална угаона брзина.
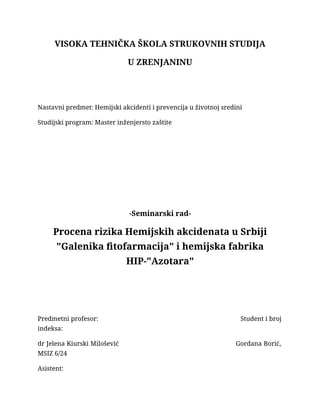
Неке од механичких карактеристика приказане су на слици 4.1.
Слика 4.1
1. Карактеристика 1 се односи на механизме чији момент терета не зависи
од брзине обртања (дизаличне уређаје, ваљаоничке машине и сл.). Код
ових механизама
=0
и
M
t
=const
.
Семинарски рад
Пројектовање електричних машина
и електромоторних погона
~ 7 ~
4.3
Статичке карактеристике мотора једносмерне струје
Статичкекарактеристике ових мотора могу бити везанеза користан момент на
вратилу мотора
M
m
или пак за момент електромегнетних сила
M
em
при чему је
M
em
>
M
m
.
Разлика између ова два момента представља моменте трења и вентилације као и
момент који одговара губицима у гвожђу и бакру.
Како је разлика између
M
em
и
M
m
мала и износи (2
5)[%] то се за практичне
прорачуне може узети да је
M
em
=
M
m
.
Такође се може занемарити утицај магнетне реакције индукта, тј. сматрати да
је она компензована.
4.4
Мотор једносмерне струје са независном и паралелном побудом
Ови мотори се користе у погонима у којима је потребан широк опсег промене
брзине и велика тачност у погледу регулације и управљања. Ови мотори су због
своје изведбе 1
2,5 пута скупљи од стандардних асихроних мотора и захтевају
више одржавања (четкице, колектори и сл.).
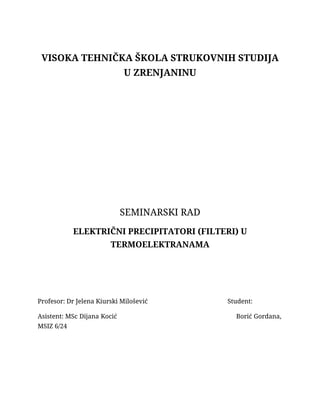
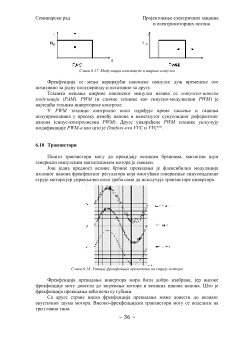
На слици 4.3 приказана је принципијална шема једносмерног мотора са
независном побудом. У роторском колу није посебно приказан компензациони
намотај са релативно малим бројем навоја за компензацију реакције индукта.
Испрекиданим линијама је приказана могућа веза на један од извора напајања
(уместо на два као на слици). У том случају ради се о мотору са оточном
(паралелном) побудом. Пру константном напону
U
обе врсте мотора имају исту
механичку карактеристику. Међутим, приликом регулације брзине напоном код
мотора са независном побудом се не сме мењати побуда док се код оточних мења.
Слика 4.3. Једносмерни мотор на независном и паралелном побудом
где је:
U
-напон напајања,
E
-индуковани напон (
ems
),
I
a
-струја ротора (индукта),
R
a
-отпорност арматуре (намотаја) ротора,
R
d
-додатна отпорност у арматурном колу (колу ротора),
R
p
-додатна отпорност у побудном колу.