SEMINARSKI RAD
IZ
NUMERICKI UPRAVLJANE MASINE I ROBOTI
Student :
Zadatak:
Za definisanu tehnolosku operaciju ili process I za definisani oblik
dela izabrati koncepcijsko resenje robota (manipulatora) koji moze da se
primeni.Izbor vrsiti na osnovu prospekata proizvodjaca.
Opis zadatka:
Razmotriti proces na datoj slici I izvrsiti izbor odgovarajuceg
industrijskog robota.Predvideti robota za nepresovane delove mase
m=5kg.Presa,traka sa nepresovanim delovima lift sa gotovim delovima se
nalaze u krugu radijusa 4m.
Na osnovu opisa zadatka treba:
-prikazati detaljan opis (sa skicama) date operacije
-definisati potreban broj stepeni slobode kretanja I dati njihov
sematski prikaz
-definisati maximalno potrebno opterecenje
-predloziti potrebnu tacnost
-definisati oblik I velicinu radnog prostora
-definisati broj,oblik I velicinu hvataca I efektora
-definisati tip pogonskog sistema
-definisati tip upravljackog sistema
-definisati metod programiranja
Komponente robota su:
manipulator
krajnji efektor
izvor energije
kontrolni sistem
Opslu
živanje prese pomoću robota
Opsluživanje mašina spada u klasu zadataka prenošenja materijala. U
ovom slučaju, radni predmet je potrebno uzeti sa trake i postaviti ga na
određeno mesto u mašini za obradu. Nakon obrade, robot vadi predmet iz
mašine i odlaže ga na predviđeno mesto, u ovom slučaju (lift).
Ovo je važna oblast primene robota u metaloprerađivačkoj industriji.
Opsluživanje jedne radne mašine jednim robotom je još uvek najčešći, mada
već prevaziđen slučaj primene robota u ove svrhe. Znatno povećane radne
brzine modernih robota, njihova dohvatljivost u novim laktastim,
vertikalnim ili horizontalnim (SCARA) konfiguracijama, tačnost
pozicioniranja pri svim orijentacijama hvataljke uz kratko vreme smirivanja
u krajnjim tačkama, omogućili su opsluživanje proizvodnih ćelija, koje se
sastoje od više radnih mašina - jednim robotom. Pritom upravljački sistem
robota služi za upravljanje i nadzor cele instalacije.
U ovom slučaju uočavamo da su zahtevi koji se postavljaju pred
upravljački sistem u slučaju paletiranja složeniji nego u slučaju prostog
premeštanja predmeta. U slučaju paletiranja potrebno je pamtiti veći broj
položaja pošto svaki predmet ima svoje mesto na paleti. Međutim, s obzirom
na pravilan raspored predmeta na paleti, moguće je pamtiti samo položaj
prvog, a naredne položaje izračunavati rekurzivno tj. dodajući svaki put
određeni pomeraj.
Kada paleta stigne do mesta obrade, traka se zaustavlja. Robot uzima
predmete iz palete i stavlja u mašinu (depaletiranje). Kada su svi predmeti
utrošeni, traka se ponovo pokreće da bi dovela novu, punu paletu. Kada se
predmeti uzeti iz palete i postavljeni u mašinu obrade, robot ih uzima iz
mašine i slaže na paletu (paletiranje).
1.
OPIS OPERACIJE
Na skicama je dat prikaz robota koji vrši prenošenje materijala sa
pokretne trake do prese, i nakon izvršene operacije stavlja gotov deo u lift.
položaj 1-
(
početni položaj postupka prenošenja
uzimanje dela sa pokretne trake )
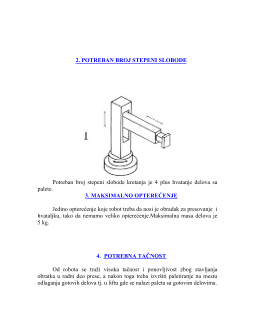
2. POTREBAN BROJ STEPENI SLOBODE
Potreban broj stepeni slobode kretanja je 4 plus hvatanje delova sa
palete.
3. MAKSIMALNO OPTEREĆENJE
Jedino opterećenje koje robot treba da nosi je obradak za presovanje i
hvataljku, tako da nemamo veliko opterećenje.Maksimalna masa delova je
5 kg.
4. POTREBNA TAČNOST
Od robota se traži visoka tačnost i ponovljivost zbog stavljanja
obratka u radni deo prese, a nakon toga treba izvršiti paletiranje na mestu
odlaganja gotovih delova tj. u liftu gde se nalazi paleta sa gotovim delovima.