VISOKA TEHNIČKA ŠKOLA STRUKOVNIH STUDIJA U
ZRENJANINU
Nastavni predmet: Automatizacija procesa
Modul: Procesno mašinstvo
-SEMINARSKI RAD-
SENZORI BRZINE
Profesor:
Student:
Broj indeksa:
Januar 2012, Zrenjanin
Sadržaj
Uvod
...................................................................................................................... 3
1.
Fizikalni osnovi merenja brzine i ubrzanja
..................................................4
2.
Senzori ugaone brzine
.....................................................................................8
2.1
Centrifugalni senzor................................................................................
8
2.2
Senzori sa satnim mehanizmom...............................................................
9
2.3
Magnetni senzor......................................................................................
9
2.4
Istosmerni tahogenerator......................................................................
11
2.5
Naizmenični tahogenerator...................................................................
12
2.6
Tahometarski mostovi............................................................................
13
2.7
Elektromagnetni senzori........................................................................
14
2.8
Piezoelektrični tahometar......................................................................
16
2.9
Optoelektronski senzor..........................................................................
17
2.10
Stroboskopski senzor...........................................................................
18
2.11
Magnetorezistivni senzor.....................................................................
19
2.12
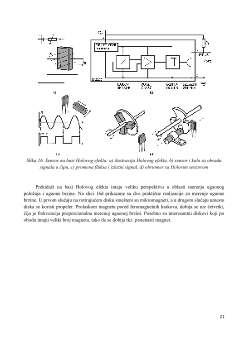
Senzor na bazi Holovog efekta............................................................
20
3.
Senzor vibracija
............................................................................................. 22
3.1
Vibracije................................................................................................
22
3.2
Parametri vibracija...............................................................................
22
3.3
Seizmički senzor....................................................................................
22
4.
Radarski senzori
............................................................................................24
4.1
Detekcija pokretnih objekata.................................................................
24
4.2
Detekcija smera kretanja.......................................................................
25
4.3
Određivanje dometa..............................................................................
25
5. Zaključak
........................................................................................................28
Literatura
2

1. FIZIKALNI OSNOVI MERENJA BRZINE I UBRZANJA
Translatorna i ugaona brzina
u savremenoj tehničkoj praksi mere se u širokom opsegu:
translatorna brzina 0-15000 m/s, a ugaona 0-20000 rad/s. Pomoću pogodnog prenosnog mehanizma
translatorna brzina se obično pretvara u ugaonu. Zato će se posebna pažnja u narednom tekstu
posvetiti senzorima ugaone brzine – tahometrima. Jedinica za merenje translatorne brzine je m/s,
ugaone rad/s, a jedinica za merenje frekvencije okretaja je
.
Ubrzanje
je ne ophodan parametar u sistemima upravljanja kretanjem centra mase pokretnih
objekata (aviona, raketa, brodova, podmornica, brzih vozova i dr.) i u sistemima inercijalne
navigacije. Senzori za merenje ubrzanja nazivaju se akcelerometri. Jedinica translatornog ubrzanja
je m/s , a ugaonog rad/s . Ubrzanje se često izražava i pomoću ubrzanja sile Zemljine teže (g=9.81
m/s ).
Klasifikacija tahometra
vrši se prema: tipu konverzije energije u primarnom elementu
senzora, načinu primene i metodi merenja. Prema tipu konverzije razlikuju se: mehanički, magnetni,
elektromehanički i stroboskopski tahometri. Mehanički tahometri imaju samo mehaničke
pretvaračke elemente (centrifugalni, frikcioni, vremenski, hidraulički i pneumatski tahometri).
Glavni element magnetnih tahometara je indukcioni pretvarač. Elektromehanički tahometri u
svojim mernim kolima sadrže elektromehaničke pretvarače (tahometarski generatori, tahometri sa
brojanjem impulsa). Stroboskopski tahometri rade na principu stroboskopskog efekta.
Po načinu primene razlikuju se stacionarni i prenosivi tahometri. Stacionarni tahometri trajno
su postavljeni na osovinu objekta, a prenosivi (ručni) priključuju se na osovinu povremeno. Prema
metodi merenja tahometri se dele na kontaktne i bez kontaktne.
Klasifikacija akcelerometara
u klasičnom obliku je iskustvena i obično se provodi prema
konstruktivnim osobinama akcelerometra (način pomeranja i način vešanja mase), prema tipu
izlaznog signala (komtinualni, diskretni), prema tipu veze između merenog ubrzanja i izlaznog
signala (prosti i integrirajući), prema načinu konverzije ubrzanja u izlazni signal (direktni i
kompenzacioni) itd. Najčešće se klasifikacija vrši prema odnosu vlastite frekvencije akcelerometra i
opsega frekventnog spektra merenog ubrzanja. U tom smislu se razlikuju:
■ Akcelerometri, koji imaju vlastitu frekvenciju iznad svih frekvencija u spektru merenog
ubrzanja;
■ Velosimetri, čija je vlastita frekvencija bliska frekvencijama koje su sadržane u spektru
merenog ubrzanja;
■ Vibrometri, čija je vlastita frekvencija manja od frekvencija koje su sadržane u spektru
merenog ubrzanja;
■ Rezonansni akcelerometri, koji imaju vlastitu frekvenciju jednaku osnovnoj frekvenciji
merene vibracije;
4
■ Polurezonantni akcelerometri, čija se vlastita frekvencija razlikuje od osnovne frekvencije
merenog ubrzanja za neki određeni iznos.
Principi gradnje senzora brzine i ubrzanja
Osnovni element senzora brzine i ubrzanja je diferencijator, koji omogućava automatsku
konverziju merene ulazne veličine u izlazni signal proporcionalan izvodu te veličine.
Ako je poznata jednačina linearnog (translatornog) kretanja tela x=f(t), tada je linearna brzina
izvod pomeraja u vremenu v=dx/dt, a ubrzanje drugi izvod pomeraja u vremenu =d x/dt ili izvod
brzine u vremenu =dv/dt. Integriranjem se može iz poznatog ubrzanja dobiti brzina v=
dt, a
pomeraj integriranjem brzine x=
dt. Na sličan način se iz poznatog ugaonog kretanja =f(t)
diferenciranjem dobijaju ugaona brzina =d /dt i ugaono ubrzanje kao
=d
/dt ili
=d /dt,
a integriranjem =
dt i
dt.
Prethodno razmatranje koje se odnosi na mehaničko kretanje može se uopštiti: pomoću
diferenciranja ili integriranja ulazne veličine mogu se odrediti brzina i ubrzanje te veličine.
Struktura senzora brzine i ubrzanja sastoji se iz četiri osnovna bloka u serijskoj vezi: ulaznog
pretvarača, integrodiferencirajućeg bloka, izlaznog pretvarača i bloka za indikaciju izlaza. Zadatak
ulaznog i izlaznog pretvarača je da omogući normiranje i usaglašavanje signala sa integro-
diferencirajućim blokom.
Slika 2. Principijelna blok šema senzora brzine i ubrzanja
Integrodiferencijator
je funkcionalni pretvarač čija je izlazna veličina z izvod ili integral
ulazne veličine y, pri čemu je y=y(t) ili y=y(x), odnosno: z=dy/dt, z=
dt.
Za diferenciranje i integriranje po vremenu t dovoljno je da blok ima samo jedan ulaz. Kada
se ove operacije obavljaju po ne vremenskom argumentu x, potreban je i drugi ulaz. Integriranje po
argumentu x u tom slučaju realizuje se u tri etape:
5
Slika 3. Frikcioni integrodiferencijator: a) sa koturom i diskom, b) sa kugličnim prenosom
Na osi kotura ne sme delovati opteretni moment, jer bi došlo do klizanja i grešaka u
diferenciranju i integriranju. Zato se za nominalnu ugaonu brzinu diska uzima najviše 1000 min .
Tome odgovara brzina kotura od 2500-3000 min u krajnjem položaju. Obrtni moment na disku
uspostavlja stacionarno stanje ugaone brzine. Tačnost frikcionih integrodiferencijatora sa koturom i
diskom je do 0,0001 %.
Elektromašinski integrodiferencijatori
su jednosmerne i naizmenične tahomašine. Svojstvo
ovih mašina je da operaciju diferenciranja po vremenu t provode u generatorskom režimu, a
operaciju integriranja po t u motornom režimu.
Kada mašina radi u generatorskom režimu, tada je:
Ur= (Up/k) = (
).
A kada je mašina u motornom režimu rada tada važi:
.
7