DR. SC. NERMINA ZAIMOVI
Ć
-UZUNOVI
Ć
DR. SC. DUŠAN VUKOJEVI
Ć
DR. SC. NEDIM HODŽI
Ć
MR. ALMA ŽIGA
STATIKA
I izdanje
Zenica, 2007. godine

iii
SADRŽAJ
1 UVOD U MEHANIKU...................................................1
1.1
Definicija, zadatak i podjela mehanike
1.2
Kratak istorijski pregled
razvoja mehanike
1.3
Osnovni pojmovi i aksiomi mehanike
1.3.1
Kruto tijelo i materijalna ta
č
ka
1.3.2
Pojam sile i vrste sile 1.3.3
Pojam mase i težine
1.3.4
Klasi
č
na mehanika i nova mehanika
1.3.5
Osnovni zakoni mehanike
1.3.6
Osnovne veli
č
ine u mehanici i njihove
jedinice
1.3.7
Metodi
č
ki pristup rješavanju zadataka u mehanici
2 UVOD U STATIKU .................................................... 15
2.1
Zadatak i podjela statike
2.2
Osnovni pojmovi u statici
2.3
Aksiomi statike
2.4
Veze, vrste veza i njihove reakcije
3 SISTEM SU
Č
ELJNIH SILA ........................................ 27
3.1
Definicija sistema su
č
eljnih sila
3.1.1
Geometrijski uslovi
ravnoteže sistema su
č
eljnih sila
3.2
Razlaganje sila na komponente
3.3
Projekcija sile na osu i na ravan
3.4
Analiti
č
ki na
č
in definisanja
sile
3.5
Analiti
č
ki uslovi ravnoteže sistema su
č
eljnih sila
PRIMJERI
4 PROIZVOLJNI SISTEM SILA U RAVNI....................... 59
4.1
Moment sile u odnosu na ta
č
ku
4.2
Momentno pravilo
(Varinjanova teorema)
4.3
Slaganje paralelnih sila u ravni
4.4
Rezultanta dvije paralelne sile
4.5
Spreg sila
4.5.1
Sistem spregova
sila u ravni
4.5.2
Slaganje spregova sila
4.6
Slaganje proizvoljnog
sistema sila u ravni
4.7
Paralelno premještanje ravnog sistema sila u
datu ta
č
ku
4.8
Svo
đ
enje ravnog sistema sila na prostiji oblik
4.9
Uslovi ravnoteže ravanskog sistema sila
4.10
Posebni uslovi ravnoteže
ravnog sistema sila
4.11
Vrste ravnoteže tijela
4.12
Grafostatika
4.12.1
Verižni poligon
4.12.2
Grafi
č
ki uslovi ravnoteže ravnog sistema
sila
4.12.3
Razlaganje sile na njoj dvije paralelne komponente
PRIMJERI

v
SADRŽAJ
10 LAN
Č
ANICE ......................................................... 347
10.1
Lan
č
anice optere
ć
ene koncentrisanim silama
10.2
Lana
č
anice
optere
ć
ene kontinuiranim optere
ć
enjem
10.2.1
Lan
č
anice sa
proizvoljno-kontinuiranim optere
ć
enjem
10.2.2
Paraboli
č
ne lan
č
anice
10.2.3
Obi
č
ne lan
č
anice
11 METOD VIRTUALNIH POMJERANJA .................... 357
11.1
Rad sile
11.2
Rad sprega sila
11.3
Pojam stepena slobode
kretanja
11.4
Princip virtualnih pomjeranja

2
STATIKA
materije. Za kretanje možemo re
ć
i da je to najop
ć
enitije svojstvo
materije.
S pojmom materije nije vezan samo pojam kretanja ve
ć
i pojmovi
prostora i vremena, jer materija je u stalnom kretanju koje se zbiva u
prostoru i vremenu. U nekim promjenama kao što su rast živih bi
ć
a,
promjena strukture konstrukcionih materijala i sli
č
no glavnu ulogu igra
vrijeme, a kod drugih dominira element prostora. Me
đ
utim, pojam
kretanja materije u prostoru pri analizi bilo koje promjene u svim
njenim pojedinostima ne možemo nikako odvojiti od njenog kretanja u
toku vremena.
Prostorno stanje materijalnog tijela definišu njegova osnovna svojstva
kao što su oblik, volumen i položaj. Promjenu oblika i volumena
materijalnog tijela nazivamo deformacijom, a promjenu položaja
kretanjem.
U prirodi se kretanje javlja u najraznovrsnijim oblicima pri
č
emu jedan
oblik kretanja može da se pretvori u drugi. Najednostavniji oblik
kretanja je mehani
č
ko kretanje za koje smo rekli da se sastoji u
promjeni položaja tijela u prostoru tokom vremena. Ako tijelo ne mijenja
svoj položaj u odnosu na druga tijela koja ga okružuju, kažemo da
miruje.
Kretanje i mirovanje su relativni pojmovi s obzirom da u prirodi ne
postoji apsolutno mirovanje. Na primjer tako nam se na prvi pogled
č
ini
da u prirodi postoje tijela koja miruju u odnosu na okolne predmete i
tijela koja mijenjaju svoj položaj u toku vremena, odnosno kre
ć
u se.
Me
đ
utim, poznato je da Zemlja rotira oko svoje ose i istovremeno po
elipti
č
noj putanji rotira oko Sunca, koje opet stalno mijenja svoj položaj
u odnosu na druge zvijezde u svemiru. Dakle,
č
itav svemir je u stanju
vje
č
nog kretanja i zato u prirodi ne postoji tijelo koje se ne bi nalazilo u
stanju kretanja. Zbog toga s pravom možemo re
ć
i da je kretanje, u
najširem smislu rije
č
i, oblik postojanja materije i ono obuhva
ć
a sve
promjene i procese koji se doga
đ
aju u prirodi i svemiru.
Vrlo
č
esto pri kretanju materijalnog tijela dolazi i do promjene njegovog
oblika i volumena (deformacije) što je prouzrokovano promjenom
me
đ
usobnog položaja njegovih sastavnih
č
estica (na primjer kretanje
č
vrstih tijela, kretanje te
č
nih i plinovitih fluida).
Deformacije koje nastaju pri kretanju
č
vrstih tijela u ve
ć
ini slu
č
ajeva
tako su male da se mogu zanemariti i zbog toga se pri prou
č
avanju
mehani
č
kog kretanja uzima u obzir samo promjena položaja.
Osim navedenih jednostavnih pojava kretanja, koje obi
č
no možemo lako
posmatrati, postoje kretanja odre
đ
ena elektri
č
kim, magnetskim,
toplinskim, opti
č
kim, hemijskim i drugim procesima u materijalnom
tijelu. Ta kretanja materijalnih tijela su mnogo složenija i veoma teško
ili uop
ć
e se ne mogu posmatrati jer se radi o kretanju molekula i atoma,
3
1- UVOD U MEHANIKU
odnosno njihovih sastavnih
č
estica. Prou
č
avanjem zakona tih kretanja
bavi se fizika u širem smislu rije
č
i.
Ako se pri analizi procesa kretanja materijalnih tijela u obzir uzme
manji broj fizi
č
kih svojstava, prou
č
avanje kretanja tih tijela
ć
e biti
daleko jednostavnije. Zbog toga je uobi
č
ajeno da se pri prou
č
avanju
zakonitosti mehani
č
kog kretanja polazi od najjednostavnijih objekata
kao što su materijalna ta
č
ka i kruto tijelo, a zatim se postepeno uzimaju
u obzir i druga fizi
č
ka svojstva (elasti
č
nost, plasti
č
nost i sl.). Na taj
na
č
in se približavamo ta
č
nom poznavanju zakona kretanja stvarnih
materijalnih tijela u prirodi.
Izu
č
avanje pojava kretanja
č
isto teorijski, neovisno o njihovom zna
č
enju
u prakti
č
nom životu, koriste
ć
i pri tome samo matemati
č
ka sredstva,
spada u teorijsku ili racionalnu mehaniku. Rezultati izu
č
avanja do kojih
dolazimo u okviru teorijske mehanike upore
đ
uju se sa stvarnoš
ć
u pri
č
emu pokušavamo teorijske i prakti
č
ne rezultate dovesti u sklad. Na taj
na
č
in dobiveni zaklju
č
ci primjenjuju se pri prora
č
unima i projektiranju
elemenata, mašina, gra
đ
evina i drugih tehni
č
kih objekata.
Mehanika, kao nau
č
na disciplina, koja primjenjuje zakone teorijske,
odnosno racionalne mehanike na tehni
č
ke objekte zove se tehni
č
ka
mehanika. Tehni
č
ka mehanika kao nau
č
na disciplina predstavlja
prijelaz od
č
isto teorijskih disciplina ka prakti
č
nim tehni
č
kim nau
č
nim
disciplinama.
Za rješavanje tehni
č
kih problema nije uvijek potrebna apsolutna
ta
č
nost koja se dobije na osnovu strogih i veoma složenih formula
teorijske mehanike. Rješavanje tehni
č
kih problema i postizanje željenog
cilja u ve
ć
ini slu
č
ajeva zahtijeva jednostavne i brze metode, što kao
posljedicu ima uvo
đ
enje novih hipoteza i zamjenu strogih formula
teorijske mehanike empirijskim relacijama, koje se temelje na
neposrednom iskustvu. Na primjer teoriju elasti
č
nosti, nauku koja
izu
č
ava idealna elasti
č
na tijela, zamjenjuje u tehni
č
koj mehanici statika
elasti
č
nih tijela ili otpornost materijala, a teorijsku hidromehaniku,
nauku o kretanju idealnih teku
ć
ina, tehni
č
ka hidromehanika, odnosno
primijenjena mehanika fluida ili hidraulika.
Prema op
ć
oj definiciji mehanike kao nau
č
ne discipline koja izu
č
ava
specifi
č
ne zakone mehani
č
kih kretanja, tehni
č
ka mehanika se dijeli na
statiku ili geometriju sila, kinematiku ili geometriju kretanja i na
dinamiku, koja prou
č
ava odnose izme
đ
u sila i kretanja.
Statika u op
ć
em slu
č
aju prou
č
ava samo mirovanje materijalnih tijela
kao specijalni slu
č
aj mehani
č
kog kretanja. Razlikujemo statiku krutih
tijela ili stereostatiku i statiku elasti
č
nih
č
vrstih tijela ili nauku o
č
vrsto
ć
i. Zadatak statike krutih tijela je da sile, koje djeluju na neko
tijelo, svede na najjednostavniji mogu
ć
i oblik, a statika elasti
č
nih

5
1- UVOD U MEHANIKU
zakone poluge i kolotura i razvio zakonitosti o djelovanju klina, vijka,
zup
č
anika i kola na vretenu;
Ptolomej
(oko 150 god. poslije n.e.), koji je
dao prvu dosta potpunu teoriju kretanja planeta (gledište geocentri
č
nog
sistema oje je odgovaralo crkvenim vlastima – zastupljeno u djelu
"Almagest"
koje je preko 15 stolje
ć
a služilo kao glavni udžbenik
astronomije) i
Pappus
(oko 390 god.), koji je razvio nauku o težištu
tijela.
Nakon što je takozvana aleksandrijska škola u VII stolje
ć
u doživjela
propast nastao je duži zastoj u razvoju mehanike i nauke uop
ć
e.
Ponovni intenzivniji razvoj nauke po
č
inje tek pred kraj XV stolje
ć
a.
Zastoj u razvoju nauke u ovom periodu nastao je uglavnom kao
posljedica nedovoljne ekonomske razvijenosti.
U drugoj polovini srednjeg vijeka dolazi do poboljšanja ekonomskog
stanja. Razlog za to je niz tehni
č
kih otkri
ć
a koja se javljaju jedno za
drugim. U IX stoje
ć
u javlja se potkivanje ekserima, a u istom periodu
prona
đ
ena je i vodenica. Do racionalizacije vu
č
ne snage životinja i
njenog pove
ć
anja dolazi u X stolje
ć
u korištenjem hama koji se
životinjama postavlja na ramena, a ne na vrat kako se
č
inilo ranije.
Dolazi do usavršavanja tehnike gra
đ
enja brodova (javlja se kormilo koje
olakšava plovidbu). U XIV stolje
ć
u iz Kine preko Arapa donosi se barut
na Zapad, a sredinom XV stolje
ć
a otkriveno je štampanje.
Pove
ć
an broj tehni
č
kih otkri
ć
a dovodi do pove
ć
anja proizvodnje koja
dovodi do intenzivnije razmjene dobara izme
đ
u pojedinih zemalja
č
ime
se problem prijevoza još više intenzivira.
Nakon otkri
ć
a Amerike, proizvodne potrebe te epohe postavljaju pred
nauku
č
itav niz problema iz domena mehanike i astronomije.
Neki od tih problema su: pove
ć
anje brodske težine i poboljšanje
upravljanja brodom, gradnja kanala u okviru rije
č
ne plovidbe, problem
odre
đ
ivanja položaja broda na otvorenom moru i dr. Navedeni problemi
spadaju u domen hidrostatike, hidrodinamike i astronomije.
Razvoj specifi
č
nih industrijskih grana kao što je rudarstvo, tako
đ
er je
mehanici postavio niz problema kao što su: gradnja mašina za bušenje,
transport i dizanje rude, izrada rudni
č
kih pumpi za vodu, problem
provjetravanja rudnika itd. Jedan sasvim novi pokret u filozofiji, nazvan
renesansa, znatno je ubrzao sve zakone
č
ovjekovog života.
Uticaj na razvoj mehanike kao nau
č
ne discipline imale su i ratne
vještine iz kojih su proistekli problemi zakona kretanja plinova kod
vatrenog oružja, pitanje akcije i reakcije, problem otpornosti materijala,
problem kretanja projektila i drugo.
Nagli razvoj mehanike javlja se u XVI i XVII stoje
ć
u. U tom periodu
živjeli su veliki umovi i nau
č
nici kao što su:
Leonardo da Vinci
(1452-
1519),
Kopernik
(1473-1543),
Galilei
(1564-1642), K
epler
(1571-1630),
6
STATIKA
Huygens
(1629-1695) i mnogi drugi.
Galilei
se smatra jednim od
osniva
č
a klasi
č
ne mehanike. On je uveo eksperimentalnu metodu kao
osnovu fizikalnih istraživanja. Postulirao je, izme
đ
u ostalog, zakon
slobodnog pada i zakon kretanja po kosini. Poseban zna
č
aj ima jedan
od osnovnih zakona mehanike, a to je princip tromosti ili inercije koji je
on izveo.
Jedan od najve
ć
ih podsticanja razvoju mehanike dao je
Newton
(1643-
1727). Svojim djelom "Matemati
č
ka na
č
ela prirodne filozofije" u kome su
izložene osnovne zakonitosti kretanja u otpornoj sredini on je udario
temelje klasi
č
noj mehanici kao nau
č
noj disciplini koja se po njemu
naziva
Newton
-ova ili klasi
č
na mehanika. Uvo
đ
enjem infinitezimalnog
ra
č
una
Newton
je dao podstreka matemati
č
arima za fizikalna
razmatranja problema mehanike. Veliki je broj znamenitih
matemati
č
ara i fizi
č
ara kao što su
Huygens
,
Leibnic
,
Bernoulli
,
Euler
i
drugi, koji su radili na problemima mehanike i doprinijeli njenom
usavršavanju i razvoju. Istovremeno, mehanika je s druge strane
izazvala veliki razvitak matematike, postavljaju
ć
i joj probleme od kojih
neki još ni danas nisu riješeni.
U XVII i XVIII stolje
ć
u na osnovu postignutih rezultata nauka je mogla
potisnuti mra
č
ne sile predrasuda, dogmatskih u
č
enja i autoritet
neprikosnovenih crkvenih vlasti. Pobijedila je
Kopernik
-ova (1473-1543)
teorija kretanja planeta (heliocentri
č
ni sistem)
č
ime je došlo do
izuzetnog preokreta u nauci, a posebno nebeskoj mehanici.
Za izuzetan razvoj mehanike u XVIII stoje
ć
u najzaslužniji nau
č
nici su:
Lagrange
,
Laplace
,
d'Alembert
,
Poisson
,
Hamilton
,
Poinsot
i drugi.
Nagli razvoj industrije u XIX stoje
ć
u doprinijelo je da se iz teorijske
mehanike izdvoji tehni
č
ka mehanika kao posebna nau
č
na disciplina.
Osniva
č
sistematske tehni
č
ke mehanike je
Poncelet
(1781-1867), a osim
njega za razvoj tehni
č
ke mehanike zaslužni su:
Hooke
,
Coulomb
,
Prony
,
Navier
,
Coriolis
,
Maxwell
,
Weisbach
,
Young
i mnogi drugi.
1.3 Osnovni pojmovi i aksiomi mehanike
1.3.1 Kruto tijelo i materijalna ta
č
ka
Kretanje
č
vrstih tijela u prirodi pod uticajem sila uvijek je povezano sa
njihovim manjim ili ve
ć
im deformacijama, koje se o
č
ituju u promjeni
oblika i volumena tih tijela. Te deformacije su dosta složene pojave pa
se u mehanici uvodi pojam krutog, to jest apsolutno
č
vrstog tijela. Pod
pojmom krutog tijela podrazumijevamo tijelo koje pod djelovanjem sila,
ma kako one bile velike ne mijenja oblik i volumen. To zna
č
i da se
isklju
č
uju osobine elasti
č
nosti materijala kao i mogu
ć
nost da se tijelo
raskine ili zdrobi. Takva tijela su idealna tijela i ona ne postoje u
prirodi. Dio mehanike koji izu
č
ava kretanje takvih tijela naziva se

8
STATIKA
se susre
ć
emo sa: silom teže, inercijalnim silama, elasti
č
nom silom
opruge, koncentrisanim silama, silom trenja klizanja, silom trenja
kotrljanja i nizom drugih sila o kojima
ć
e biti više govora u narednim
poglavljima.
1.3.3 Pojam mase i težine
Veliki broj voza
č
a vjerovatno je mnogo puta uo
č
io pojavu koja se o
č
ituje
u tome da kada voze automobil koji je više optere
ć
en, istom brzinom
kao i manje optere
ć
en automobil, potrebno je daleko više napora za
zaustavljanje automobila. Ili ako su dvije kugle iste veli
č
ine, ali od
razli
č
itih materijala, pokrenute jednakim udarcem one
ć
e se na istoj
podlozi otkotrljati na razli
č
ite udaljenosti. Iz navedenih primjera može
se zaklju
č
iti da su sva tijela troma ili inertna, ali da mjera njihove
tromosti nije ista. Mjeru tromosti ili inertnosti nekog tijela u mehanici,
prema
I.
Newton
-u, naziva se masom tijela. Za svako tijelo masa je
kosntantna veli
č
ina koja je proporcionalna težini tijela koja se mijenja u
zavisnosti od položaja tijela na Zemlji. Težina tijela (uobi
č
ajena oznaka
za težinu je
G
G
) je sila kojom Zemlja privla
č
i tijelo prema svom središtu,
odnosno pritiskuje ga na horizontalnu podlogu (pri tome je
G
=
m
·
g
, gdje
je:
m
(kg) masa tijela, a
g
= 9,81 ms
-2
ubrzanje Zemljine gravitacije). Na
polovima Zemlje je težina tijela ve
ć
a nego na ekvatoru i ona se smanjuje
s visinom kako se udaljavamo od Zemljine površine. Osim Zemljine
gravitacije na svako tijelo djeluju i privla
č
ne sile drugih tijela, ali je
njihovo djelovanje u pore
đ
enju sa Zemljinom privla
č
nom silom
zanemarivo. Mase tijela se mogu mjeriti i upore
đ
ivati. Izmjerenu masu
tijela nazivamo teškom ili gravitacionom masom.
Pri kretanju, svojom inertnoš
ć
u tijelo se suprostavlja svakoj promjeni
stanja kretanja. Ako na dva razli
č
ita tijela djelujemo jednakom silom ta
tijela
ć
e dobiti ubrzanja koja su obrnuto proporcionalna njihovim
masama. Na isti na
č
in se mogu uporediti i mase, a tako odre
đ
ena masa
naziva se inercijalnom masom.
Ako se jednakom silom djeluje na tijela iste težine ona
ć
e se kretati
jednakim ubrzanjem, a to zna
č
i da tijela jednakih gravitacionih masa
imaju jednake i inercijalne mase. Prema tome obje su mase jednake.
Posljedica navedenog je da sva tijela u praznom prostoru (bezvazdušni
prostor ili vakuum) padaju jednakom brzinom. Karakteristika prema
kojoj su gravitacija i inercija u biti jedno te isto je osnova op
ć
e teorije
relativnosti.
Od ranije je poznata
č
injenica da je gravitacija na razli
č
itim mjestima
Zemljine površine razli
č
ita, a isto tako mijenja se i sa vremenom. Dakle,
možemo re
ć
i da se težina mijenja u prostoru i vremenu, dok masa
ostaje konstantna, to jest ona se ne mijenja nikakvim vanjskim
utjecajima kao što su na primjer: mehani
č
ki, toplinski, svjetlosni,
9
1- UVOD U MEHANIKU
elektri
č
ki i drugi. Zbog neznatne promjene Zemljine gravitacije, u
prakti
č
nom životu se
č
esto masa i težina zamjenjuju, a kao propratno
se ne pravi razlika ni izme
đ
u specifi
č
ne težine i gusto
ć
e (specifi
č
ne
mase). Strogo uzevši, pojam specifi
č
ne težine podrazumijeva težinu
jedinice volumena, dok je gusto
ć
a masa jedinice volumena. Masa tijela
je skalarna veli
č
ina, za razliku od sile teže koja je vektor.
1.3.4 Klasi
č
na mehanika i nova mehanika
Intenzivan razvoj fizike krajem IX i po
č
etkom XX stolje
ć
a imao je za
posljedicu važna otkri
ć
a na podru
č
ju nauke o strukturi atoma i
kretanju njihovih osnovnih
č
estica, radioaktivnosti, elektrodinamike i
nizu drugih nau
č
nih disciplina. Ta otkri
ć
a su pokazala da za kretanje
mikro
č
estica i za kretanje tijela
č
ija se brzina približava brzini svjetlosti
ne važe zakoni klasi
č
ne mehanike.
U prvoj
č
etvrtini XX stolje
ć
a razvila se takozvana relativisti
č
ka
mehanika, koja se temelji na
Einstein
-ovoj teoriji relativnosti.
Einstein
-ova teorija relativnosti predstavlja još jedan veliki korak u
razvoju mehanike. Relativisti
č
ka mehanika, odnosno takozvana "nova
mehanika" unosi posve nov sadržaj u okviru osnovnih pojmova
mehanike kao što su prostor, vrijeme i materija. Klasi
č
na mehanika
predstavlja poseban slu
č
aj i samo se u podru
č
ju malih brzina poklapa
sa novom mehanikom. Prema
Einstein
-ovoj teoriji relativnosti prostor i
vrijeme su relativni pojmovi, a mjerenje prostora i vremena zavisi od
položaja i kretanja posmatra
č
a.
Kako su stvarne brzine tijela u prirodi i tehnici daleko manje od brzine
svjetlosti, klasi
č
na mehanika je i dalje u punoj mjeri sa
č
uvala svoje
zna
č
enje za tehni
č
ku mehaniku. Razlika u rezultatima klasi
č
ne i
relativisti
č
ke mehanike dobija na zna
č
aju samo kada je brzina tijela
približno jednaka brzini svjetlosti. Kod kretanja tijela brzinom mnogo
manjom od brzine svjetlosti klasi
č
na mehanika daje sliku stvarnosti s
veoma visokim stepenom ta
č
nosti.
Inercijalna masa tijela
m
u stanju kretanja, prema teoriji relativnosti
ve
ć
a je od njegove mase
m
o
u stanju mirovanja, to jest masa se mijenja
u zavisnosti od brine prema zakonu
=
−
2
2
1
o
m
m
v
c
.............................................................................. .... (1.1)
gdje je:
v
brzina kretanja tijela, a
c
brzina svjetlosti
.
Prema jedna
č
ini (1.1) slijedi zaklju
č
ak da brzina materijalnog tijela koje
u stanju mirovanja ima masu
m
o
ve
ć
u od nule nikada ne može dosti
ć
i

11
1- UVOD U MEHANIKU
2) Zakon proporcionalnosti sile i ubrzanja:
Promjena ubrzanja (akceleracija)
G
a
ili brzine
G
v
nekog tijela
proporcionalna je sili
G
F
koja djeluje na to tijelo, a odvija se u pravcu i
smjeru djelovanja sile, to jest
=
⋅
G
G
F
m a
, ......................................................................................(1.3)
gdje su:
G
F
i
G
a
vektori istog pravca i smjera, a
m
masa tijela.
3) Princip jednakosti akcije i reakcije:
Dva tijela koja se dodiruju, djeluju uvijek uzajamno jedno na drugo,
silama koje su po intenzitetu i pravcu jednake, ali suprotna smjera.
Kra
ć
e re
č
eno,
"actio=reactio"
, odnosno akcija je uvijek jednaka i
suprotno usmjerena reakciji.
Prvi zakon je ve
ć
i bio poznat
Galilei
-u i on je posljedica drugog aksioma
prema kome je za silu
G
F
= 0 i ubrzanje
G
a
= 0, što zna
č
i da se brzina
G
v
ne mijenja po pravcu i veli
č
ini. Uopšteno možemo re
ć
i da je inercijalno
kretanje tijela dosta složena pojava.
Drugi zakon predstavlja ustvari dinami
č
ku definiciju sile.
Prema tre
ć
em zakonu je o
č
igledno da mase tijela djeluju jedna na drugu
silama koje su po veli
č
ini jednake, ali suprotnog smjera, odnosno svaka
sila (akcija) proizvodi jednaku i suprotno usmjerenu silu (reakcija).
I zaista posmatraju
ć
i pojave u prirodi, sile se uvijek javljaju u parovima,
kao akcija i reakcija. Pri tome uopšte nije bitno koju od njih smatramo
akcijom, a koju reakcijom.
Karakteristika tehni
č
ke mehanike je ta da su zakoni i teoreme klasi
č
ne
mehanike, uz primjenu pojma sile, svedeni na oblik koji je prikladan za
primjenu na materijalna tijela kao što su mašine, vozila, gra
đ
evinske
konstrukcije i sli
č
no, a koji se susre
ć
u u tehnici. Analiza i primjena
pojedinih teorema mehanike odnosi se na materijalna tijela, a to zna
č
i
da oni važe op
ć
enito bez obzira o kakvom se obliku materijalnog tijela
radi.
1.3.6 Osnovne veli
č
ine u mehanici i njihove jedinice
Zakonom o mjernim jedinicama i mjerilima utvr
đ
eno je da se u našoj
zemlji mogu upotrebljavati samo mjerne jedinice Me
đ
unarodnog sistema
mjernih jedinica – SI (skra
ć
enica SI - na francuskom jeziku:
Système
International d' Unités
).
Iz niza fizi
č
kih veli
č
ina po dogovoru su izdvojene me
đ
usobno nezavisne
veli
č
ine, koje nazivamo osnovnim veli
č
inama i za njih su definisane
osnovne jedinice. Pregled osnovnih veli
č
ina i njihovih jedinica dat je u
tabeli 1.1.
12
STATIKA
Tabela 1.1. Osnovne veli
č
ine i njihove jedinice
Osnovna mjerna jedinica
Osnovna veli
č
ina
Naziv Oznaka
Dužina metar
m
Masa kilogram
kg
Vrijeme sekunda
s
Ja
č
ina elektri
č
ne struje
amper
A
Termodinami
č
ka temperatura
kelvin
K
Svjetlosna ja
č
ina kandela
(candela)
cd
Koli
č
ina materije
(supstance, gradiva)
mol mol
Ostale fizi
č
ke veli
č
ine i njihove jedinice mogu se definisati pomo
ć
u
osnovnih veli
č
ina i jedinica primjenom algebarskih izraza i upotrebom
matemati
č
kih simbola množenja i dijeljenja. Na taj na
č
in dobijene
veli
č
ine i jedinice nazivamo izvedenim. Neke od izvedenih mjernih
jedinica dobile su nazive i oznake po imenima poznatih nau
č
nika.
Primjeri definisanja izvedenih mjernih jedinica:
-
jedinica za silu zove se njutn (
newton
) (N): Prema definiciji to je
sila koja masi od 1 kilograma daje ubrzanje od 1 m/s
2
, odnosno
1N = 1 kg ·1 m/s
2
= 1 kgms
-2
, a odre
đ
en je pomo
ć
u formule
F
=
m
·
a
(
F
– sila,
m
– masa,
a
– akceleracija),
-
jedinica za mehani
č
ki rad (energiju) zove se džul (
joule
) (J): 1 J = 1
Nm, a odre
đ
ena je pomo
ć
u formule
A
=
F
·
s
(
A
– mehani
č
ki rad,
F
– sila,
s
– pre
đ
eni put),
-
jedinica za snagu zove se vat (
watt
) (W): 1W = 1J/s, a odre
đ
ena je
pomo
ć
u formule
W
=
A
/
t
(
W
– snaga,
A
– mehani
č
ki rad,
t
– vrijeme) itd.
Za definisanje mehani
č
kih veli
č
ina od navedenih sedam dovoljne su tri
osnovne veli
č
ine, a to su: dužina, masa i vrijeme. Ostale veli
č
ine kao što
su: sila, brzina, ubrzanje, pritisak i druge su izvedene veli
č
ine.
Upotreba SI sistema ima niz prednosti kao što su:
-
univerzalnost (može se koristiti u svim granama nauke),
-
jednostavan je pošto je izgra
đ
en na bazi koherentnosti jedinica,
-
jasan je, pošto su u njemu kona
č
no razlu
č
eni pojmovi mase od
težine, to jest pojam sile,
-
prakti
č
an je jer se koristi ve
ć
uobi
č
ajenim jedinicama kao što su
na primjer za dužinu – metar, za vrijeme – sekunda itd.,

14
STATIKA
1.3.7 Metodi
č
ki pristup rješavanju zadataka u
mehanici
Problemi sa kojima se inženjeri i tehni
č
ari susre
ć
u u tehni
č
koj praksi,
kada je u pitanju mehanika, rješavaju se primjenom razli
č
itih zakona i
metoda mehanike. Obi
č
no su to analiti
č
ke, grafi
č
ke i grafoanaliti
č
ke
metode, to jest kombinacija ra
č
unskih i geometrijskih metoda.
Analiti
č
ko rješenje zadatka podrazumijeva u prvom koraku definisanje
odre
đ
ene algebarske forme, odnosno oblika, a zatim uvrštavanje
zadanih numeri
č
kih vrijednosti, nakon
č
ega se dobijaju odgovaraju
ć
i
rezultati. Izbor metode koju
ć
emo koristiti za rješavanje zadatka zavisi
od zahtjeva u pogledu ta
č
nosti rezultata i brzine rješavanja. Ta
č
niji
rezultati dobijaju se ra
č
unskim metodama ali zahtijevaju ve
ć
i utrošak
vremena. Grafi
č
ke metode su manje ta
č
ne, ali su zato brže i preglednije.
Ra
č
unskim metodama se u ve
ć
ini slu
č
ajeva dobija funkcionalna
zavisnost izme
đ
u zadanih i traženih veli
č
ina, što se
č
esto upravo i traži,
dok se grafi
č
kim metodama ta zavisnost odre
đ
uje odgovaraju
ć
im
konstrukcijama dijagrama i planova. Poželjno je da se svaki rezultat
pažljivo provjeri kao i to da se svaki zadatak, ako je to mogu
ć
e, riješi
analiti
č
ki i grafi
č
ki. Na taj na
č
in jedna metoda je kontrola druge
metode.
Pri rješavanju zadataka iz mehanike cjelokupni proces može se
uglavnom svesti na tri faze:
-
faza pojednostavljenja zadanog složenog problema (definisanje
idealiziranog modela problema),
-
faza rješavanja idealiziranog problema ra
č
unskom i/ili grafi
č
kom
metodom i
-
faza interpretacije dobijenih rezultata u zavisnosti od zadanih
veli
č
ina postavljenog zadatka.
Dosljednom primjenom svih navedenih faza pri rješavanju zadataka iz
mehanike, istovremeno se sti
č
e sigurnost i iskustvo bez
č
ega ne
možemo uspješno rješavati probleme iz tehni
č
ke prakse. Osnovni
zadatak tehni
č
ke mehanike i jeste da se budu
ć
i inženjeri priviknu na
jedan metodi
č
ki pristup rješavanju postavljenog zadatka.
15
UVOD U STATIKU
2.1 Zadatak i podjela statike
Statika, kao dio mehanike, može se definirati, kao nauka o ravnoteži
sila koje djeluju na materijalno tijelo, odnosno mehani
č
ki sistem.
Drugim rije
č
ima, u okviru statike prou
č
avaju se uslovi koji moraju biti
ispunjeni da bi sile, koje djeluju na promatrano tijelo, odnosno sistem,
bile u ravnoteži.
Razlikujemo stati
č
ku i dinami
č
ku ravnotežu. Pod pojmom stati
č
ke
ravnoteže podrazumijevamo slu
č
aj kada tijelo na koje djeluju sile
miruje, a kada se tijelo pod djelovanjem sila kre
ć
e jednoliko i
pravolinijski (
v
= const.) tada imamo slu
č
aj dinami
č
ke ravnoteže. U tom
slu
č
aju za kretanje tijela vrijedi zakon inercije (I aksiom), i pri tome
tijelo se ponaša kao da na njega ne djeluje nikakva sila. Stanje
mirovanja sa stanovišta kinematike podrazumijeva slu
č
aj kretanja kada
je brzina jednaka nuli (
v
= 0).
Prema na
č
inu i metodama prou
č
avanja ravnoteže krutih tijela, statiku
možemo podjeliti na elementarnu i analiti
č
ku statiku.
U elementarnoj statici se razmatraju metode svo
đ
enja ili redukcije
zadanog sistema sila na jednostavniji oblik. Kako izlaganja u ovom
dijelu statike imaju geometrijski karakter, taj dio statike zove se još i
geometrijom sila. Pri rješavanju zadataka u elementarnoj statici služimo
se analiti
č
kom, grafi
č
kom (geometrijskom) ili grafoanaliti
č
kom
metodom. Pri analiti
č
kom postupku, tražene veli
č
ine analiziraju se i
odre
đ
uju numeri
č
ki, a pri grafi
č
kom postupku, sve veli
č
ine se zadaju
grafi
č
ki i sam proces odre
đ
ivanja traženih veli
č
ina izvodi se
č
isto
grafi
č
kim putem. Grafoanaliti
č
ka metoda predstavlja kombinaciju dvije
prethodne opisane metode.
Analiti
č
ka statika se zasniva na principu virtualnih radova koji
predstavljaju fundamentalne principe mehanike i koji definišu op
ć
i
kriterij ravnoteže mehani
č
kih sistema.
Prema agregatnom stanju tijela statiku možemo podijeliti na: statiku
č
vrstih tijela (geostatiku ili samo statiku), statiku te
č
nog fluida
(hidrostatiku) i statiku plinovitih fluida (aerostatiku). Statika
č
vrstih
tijela dijeli se na: statiku krutih tijela (stereostatika), statiku elasti
č
nih
tijela (elastostatika) i statiku plasti
č
nih tijela (plastostatika).

17
2- UVOD U STATIKU
Osnovna jedinica za mjerenje intenziteta sile je
newton
(njutn).
Newton
(N) je sila koja masi od 1 kilograma daje ubrzanje od 1 m/s
2
,
(1N = 1 kg
⋅
1m/s
2
= 1 kgm/s
2
),
Pri prou
č
avanju djelovanja sila na tijelo, obi
č
no se služimo pravouglim
koordinatnim sistemom (slika 2.1.b), i odre
đ
ujemo položaj napadne
ta
č
ke (hvatišta)
A
sile
G
F
pomo
ć
u vektora položaja
G
r
, odnosno pomo
ć
u
projekcija
X
,
Y
i
Z
, vektora
G
r
na ose koordinatnog sistema. U tom
slu
č
aju sila
G
F
, kao vektorska veli
č
ina, odre
đ
ena je ako je poznat njen
intenzitet
=
G
F
F
i tri ugla, koje vektor
G
F
zatvara sa pozitivnim
smjerovima koordinatnih osa.
Projekcije vektora
G
F
na koordinatne ose odre
đ
ene su relacijama:
X
=
F
x
=
F
cos
α
, ........................................................................... (2.1.)
Y
=
F
y
=
F
cos
β
..................................................................................
(2.2.)
Z =
F
z
=
F
cos
γ
. ............................................................................ (2.3.)
Intenzitet sile
G
F
izra
č
unavamo na osnovu intenziteta komponenti
pomo
ć
u poznate relacije:
=
=
+
+
G
2
2
2
F
F
X
Y
Z
, ............................................................... (2.4.)
a pravac djelovanja pomo
ć
u relacija:
α
=
cos
X
F
,................................................................................... (2.5.)
β
=
cos
Y
F
,.................................................................................... (2.6.)
γ
=
cos
Z
F
..................................................................................... (2.7.)
U praksi se intenzitet sile naj
č
eš
ć
e mjeri dinamometrima ili vagom.
Sistem sila
. Sistem sila definišemo kao skup sila koje djeluju na neko
tijelo.
Uravnoteženi sistem sila
. Uravnoteženi sistem sila je onaj pri
č
ijem
dejstvu tijelo ili sistem tijela se nalazi u ravnoteži (ne kre
ć
e se, odnosno
miruje).
Sistem tijela
. Sistem tijela predstavlja skup materijalnih tijela koja
uzajamno djeluju jedno na drugo, tako da ravnoteža bilo kojeg tijela
zavisi od dejstva drugih tijela. Sile me
đ
usobnog djelovanja tijela unutar
sistema nazivamo unutrašnjim, a sile koje poti
č
u od tijela van sistema
nazivamo spoljašnjim silama sistema.
18
STATIKA
Slobodno tijelo.
Pod slobodnim tijelom podrazumijevamo tijelo koje nije
vezano za druga tijela i može da zauzme bilo koji položaj u prostoru
(npr. hitac u zraku).
Vezano tijelo
. Za neko tijelo kažemo da je vezano ako je njegovo
pomjeranje u prostoru ograni
č
eno drugim tijelima.
Ekvivalentni sistem sila
. Ekvivalentni sistem sila je onaj koji može
zamijeniti posmatrani sistem sila, koji djeluje na tijelo, a da se pri tom
dejstvo na tijelo ne promijeni.
Rezultanta sila
. Rezultanta datog sistema sila je sila koja je evivalentna
posmatranom sistemu sila, odnosno ona zamjenjuje dejstvo svih tih sila
na kruto tijelo.
Uravnotežavaju
ć
a sila
. Uravnotežavaju
ć
a sila je sila koja je jednaka
rezultanti po intenzitetu i pravcu, a suprotnog je smjera.
Koncentrisana sila
. Koncentrisana sila je sila koja djeluje u jednoj
ta
č
ki tijela (ako se može smatrati da se mehani
č
ko dejstvo prenosi u
ta
č
ku).
Kontinuirana sila
. Kontinuirana sila je sila
č
ije se dejstvo prenosi na
više ta
č
aka tijela kontinuirano (po dužini, površini ili volumenu datog
tijela).
Apsolutno kruto tijelo
. Apsolutno kruto ili kruto tijelo možemo
definisati kao tijelo kod koga se pri mehani
č
kom dejstvu drugih tijela,
ne mijenja rastojanje izme
đ
u bilo koje dvije njegove ta
č
ke.
Materijalna ta
č
ka
. Pojam materijalne ta
č
ke definisali smo tako
đ
er u
poglavlju 1.1, znamo da pod tim pojmom podrazumijevamo materijalno
tijelo
č
ije su dimenzije zanemarive.
Princip solidifikacije
. Poznato nam je da prirodno
č
vrsta tijela nisu
apsolutno
č
vrsta (kruta) i da se radi toga ona pod djelovanjem vanjskih
sila deformišu. Kada se takvo, deformisano tijelo nalazi u stanju
mirovanja, za vanjske sile, koje na to tijelo djeluju, vrijede isti uslovi
ravnoteže kao i za sile koje djeluju na kruto tijelo. Ako se prirodno
č
vrsto tijelo nalazi u položaju ravnoteže, ono
ć
e ostati u ravnoteži i u
slu
č
aju kada bi cijelo tijelo ili bilo koji njegov dio postao krut. Navedeno
predstavlja takozvani princip solidifikacije ili ukru
ć
ivanja. Prema tome,
sva prirodna
č
vrsta tijela, kada miruju, možemo pri prou
č
avanju
ravnoteže sila koje na njih djeluju smatrati krutim tijelima. To važi i za
fluide, odnosno teku
ć
ine i plinove s tim da moramo uvesti i neke
dopunske uslove ravnoteže.
2.3. Aksiomi statike
Rije
č
aksiom poti
č
e od gr
č
ke rije
č
i
axioma
koja ima višestruko zna
č
enje:
ugled, autoritet sam po sebi, sama sobom vidljiva nau
č
na istina,

20
STATIKA
Slika 2.3. Dodavanje uravnoteženog sistema sila postoje
ć
em sistemu
Ako na kruto tijelo djeluje sila
G
F
u ta
č
ki
A
, na osnovu drugog aksioma,
u ta
č
ki
B
možemo dodati uravnoteženi sistem sila, a pri tome ukupno
dejstvo sila na sistem ne
ć
e biti promjenjeno. Na osnovu prvog aksioma,
sila
G
F
u ta
č
kama
A
i
B
može se ukloniti, tako da ostaje samo sila
G
F
u
ta
č
ki
B
, slika 2.3. Ova konstatacija o pomjeranju sile duž napadne linije
važi samo za kruto tijelo, dok se za deformabilno tijelo ovaj stav ne bi
mogao prihvatiti.
Tre
ć
i aksiom
: Rezultanta dvije sile koje djeluju na tijelo u jednoj ta
č
ki,
odre
đ
ena je dijagonalom paralelograma, konstruisanog nad silama kao
njegovim stranicama, slika 2.4.
Slika 2.4. Definisanje rezultante sila primjenom paralelograma sila
Drugi postupak za odre
đ
ivanje rezultante dvije sile koje djeluju u jednoj
ta
č
ki svodi se na, takozvano, pravilo trougla sila, slika 2.5.
21
2- UVOD U STATIKU
Slika 2.5. Definisanje rezultante sila primjenom pravila trougla sila
Na kraj sile
G
1
F
, nanosi se sila
G
2
F
, a vektor koji spaja po
č
etak sile
G
1
F
i
kraj sile
G
2
F
, pretstavlja rezultantu
G
R
F
sila
G
1
F
i
G
2
F
.
Pored ove dvije grafi
č
ke metode, za odre
đ
ivanje rezultante sila koristi se
i analiti
č
ka metoda. Primjenom kosinusne teoreme, prema slici 2.5,
intenzitet rezultante odre
đ
en je sljede
ć
im izrazom:
α
=
+
+
2
2
1
2
1 2
2
cos
R
F
F
F
F F
........................................................ (2.8.)
Č
etvrti aksiom
: Nastao je iz tre
ć
eg zakona mehanike i glasi: Sile sa
kojim dva tijela djeluju jedno na drugo jednake su po intenzitetu i
pravcu, a usmjerene su suprotno, slika 2.6.
Slika 2.6. Djelovanje uravnoteženog sistema dvije sile suprotnog smjera
Kod ovih razmatranja posmatramo samo spoljašnje sile, pošto su
unutrašnje sile izme
đ
u djeli
ć
a krutog tijela me
đ
usobno uravnotežene.
Peti aksiom
: Ako se deformabilno tijelo nalazi u ravnoteži, ravnotežno
stanje
ć
e se zadržati, ako to tijelo postane kruto (princip solidifikacije).
Šesti aksiom
(aksiom o vezama): Za neko tijelo kažemo da je vezano
ako je njegovo pomjeranje u prostoru ograni
č
eno drugim tijelima. Svako
vezano tijelo može se posmatrati kao slobodno (tijelo
č
ije pomjeranje u

23
2- UVOD U STATIKU
unutrašnjih veza, i obratno. Ako u okviru materijalnog sistema
dominiraju samo unutrašnje veze tada se on naziva slobodnim.
Kada bi sistem bio slobodan, djelovanje veza bi se o
č
itovalo u tome što
bi one spre
č
avale odnosno mijenjale kretanje koje bi priložene vanjske
sile izazivale. Možemo smatrati da veze proizvode isto djelovanje kao i
sile pa se zbog toga u mehanici djelovanje veza zamjenjuje silama koje
nazivamo reakcijama veza. Dakle, djelovanje veza svodi se na sile-
reakcije veza koje ove proizvode. Na osnovu navedenog možemo
zaklju
č
iti da pri odre
đ
ivanju ravnoteže neslobodne materijalne ta
č
ke ili
tijela, veze treba zamIjeniti njihovim reakcijama, to jest osloboditi ta
č
ku,
odnosno tijelo njihovih veza. Drugim rije
č
ima ako silama koje djeluju na
materijalnu ta
č
ku ili tijelo dodamo reakcije veza možemo posmatrani
materijalni sistem smatrati slobodnim.
Me
đ
utim, treba imati u vidu da se reakcije veza razlikuju od obi
č
nih
sila, prvenstveno zbog toga što reakcije veza nisu odre
đ
ene samom
vezom, nego zavise od sila koje djeluju na sistem kao i od kretanja
sistema. Obi
č
ne sile, naprotiv, ne zavise od drugih sila niti od kretanja
sistema. Osim toga djelovanje obi
č
nih sila može izazvati kretanje
sistema, dok reakcije veza ne mogu izazvati nikakvo kretanje. Zbog toga
reakcije veza nazivamo pasivnim silama, dok su obi
č
ne sile aktivne.
U ve
ć
ini slu
č
ajeva reakcije veza su nepoznate kako po pravcu i smjeru
djelovanja tako i po intenzitetu. Razmotrit
ć
emo nekoliko jednostavnijih
slu
č
ajeva veza kada možemo odrediti pravac reakcije.
1. Veza ostvarena pomo
ć
u užeta, lanca i sl.
Reakcija ima pravac ose
zategnutog užeta, lanca i sl (slika 2.8). Takve veze mogu prenositi samo
sile zatezanja, to jest sile koje nastoje prouzrokovati naprezanje na
zatezanje tih elemenata.
Slika 2.8. Veza ostvarena pomo
ć
u užeta, lanca ili na sli
č
an na
č
in
2. Veza ostvarena pomo
ć
u krutog štapa zanemarive težine.
U
slu
č
aju veze ostvarene pomo
ć
u krutog štapa zanemarive težine i uz
zanemareno trenje u zglobovima štapa, reakcija štapa ima pravac
njegove uzdužne ose, odnosno pravac koji spaja njegove krajnje ta
č
ke
(slika 2.9). Takva veza može prenositi sile zatezanja i pritiska.
a)
b)
24
STATIKA
a)
b)
Slika 2.9. Veza ostvarena pomo
ć
u krutog štapa zanemarive težine
3. Glatka površina.
U slu
č
aju kada materijalna ta
č
ka ili tijelo može da
klizi po nepomi
č
noj površini tijela ili materijalnoj liniji bez trenja,
reakcija veze ima pravac okomit na površinu ili liniju, ili ta
č
nije pravac
okomit na tangencijalnu ravan kroz dodirnu ta
č
ku (slika 2.10.a). Ako
površina tijela ili materijalna linija mogu kliziti bez trenja po nepomi
č
noj
ta
č
ki ili tijelu, odnosno ako se u stanju mirovanja na njih oslanjaju,
pravac reakcije veze okomit je na pomi
č
nu površinu ili materijalnu liniju
(slika 2.10.b).
a)
b)
Slika 2.10. Glatka površina kao veza
4. Cilindri
č
ni zglob, cilindri
č
ni ležaj
. U slu
č
aju veze pomo
ć
u
cilindri
č
nog zgloba ili cilindri
č
nog ležaja, pravac reakcije je, zanemarimo
li trenje, okomit na osu zgloba, odnosno ležaja (slika 2.11). Ako je veza
ostvarena pomo
ć
u nepomi
č
nog cilindri
č
nog zgloba, pravac reakcije je
nepoznat, odnosno to može biti bilo koji pravac okomit na osu zgloba,
što zavisi od položaja vezanog tijela i sila koje na njega djeluju. Tipi
č
an
primjer takve veze je nepomi
č
ni oslonac nosa
č
a (punih linijskih,
rešetkastih, okvirnih i dr.). Obi
č
no se reakcija cilindri
č
nog zgloba ili
ležaja, radi lakšeg izu
č
avanja problema razlaže u dvije komponente.

26
STATIKA
Slika 2.13. Uklještenje kao veza
Za razliku od navedenih veza koje zbog zanemarivanja odre
đ
enih
karakteristika, kao što su trenje ili sopstvena težina, nazivamo idealnim
vezama, u stvarnosti su to veze kod kojih se javlja i trenje. U tom
slu
č
aju se ukupna reakcija definiše preko komponente normalne i
tangencijalne reakcije. Tangencijalna komponenta reakcije leži u
tangencijalnoj ravni postavljenoj kroz ta
č
ku, liniju ili površinu dodira
dva tijela i naziva se silom trenja. Primjer takve veze prikazan je na slici
2.14.
Slika 2.14. Reakcija veze razložena na normalnu i tangencijalnu
komponentu – realna veza
Iz navedenog se može zaklju
č
iti da je reakcija veze uvijek usmjerena
suprotno pravcu i smjeru kretanja tijela.
27
SISTEM SU
Č
ELJNIH
SILA
3.1 Definicija sistema su
č
eljnih sila
Sistem su
č
eljnih sila definišemo kao sistem sila koje djeluju na tijelo u
jednoj ta
č
ki ili u razli
č
itim ta
č
kama krutog tijela, pri
č
emu mora biti
zadovoljen uvjet da se produžene napadne linije tih sila sijeku u jednoj
ta
č
ki. Ako sve sile koje djeluju na tijelo leže u jednoj ravni onda
govorimo o
ravanskom sistemu su
č
eljnih sila
, slika 3.1a, ako su
č
eljne
sile, koje djeluju na tijelo, ne leže u istoj ravni onda govorimo o
prostornom sistemu su
č
eljnih sila
, slika 3.1b. Kao specijalan slu
č
aj
ravanskog sistema su
č
eljnih sila je
sistem kolinearnih sila
, slika 3.1c.
a) b) c)
Slika 3.1 Su
č
eljni sistem sila
Odre
đ
ivanje rezultante, njezinog pravca, smjera i intenziteta analiti
č
kim
i grafi
č
kim putem za su
č
eljni sistem sila, ve
ć
je prezentirano u
prethodnim poglavljima. Ukoliko imamo više sila njihovu rezultantu
najjednostavnije možemo odrediti vektorskim sabiranjem svih
komponenti sila.
=
+
+
+
G
G
G
G
"
1
2
R
n
F
F
F
F
,...................................................................... (3.1)
=
=
∑
G
G
1
n
R
i
i
F
F
...................................................................................... (3.2)

29
3- SU
Č
ELJNI SISTEM SILA
a) Ako su zadani pravci razlaganja sile
Ako su poznati pravci
AB
i
AC
, silu
G
F
možemo razložiti po pravilu
paralelograma na komponente
G
1
F
i
G
2
F
, slika 3.4.
Slika 3.4 Razlaganje sile na komponente primjenom
pravila paralelograma sila
b) Ako je zadat intenzitet komponenti
U ovom slu
č
aju postupamo na isti na
č
in kao kod konstrukcije trougla,
kada su poznate veli
č
ine sve tri stranice. Dakle u ovom slu
č
aju nad
datom silom konstruišemo trougao sila, pri tome se vrh rezultante mora
su
č
eljavati sa vrhom jedne od komponenti.
c) Ako je poznat pravac jedne komponente i intenzitet druge
komponente
Isto tako i ovaj zadatak se rješava konstrukcijom trougla, tako što se od
po
č
etka date sile
G
F
povu
č
e pravac zadate komponente, a šestarom se iz
kraja sile
G
F
opiše kružnica
č
iji polupre
č
nik odgovara intenzitetu druge
komponente. Presjekom ove kružnice sa zadatim pravcem odre
đ
uje se
veli
č
ina, pravac i smjer obje komponente na koje se razlaže sila
G
F
.
d) Ako je zadat pravac, smjer i intenzitet jedne komponente
U ovom slu
č
aju, primjenom pravila o paralelogramu sila, bez ikakvih
problema može se zadata sila
G
F
razložiti na pripadaju
ć
e komponente,
pošto je jedna od komponenti potpuno definisana.
U konkretnom slu
č
aju kod rješavanja zadataka, odnosno postavljenih
problema su
č
eljnih sila u ravni, mogu
ć
e je odrediti najviše dvije
nepoznate komponente, odnosno reakcije veza, slika 3.5. Ovo proizilazi
iz pravila o trouglu sila.
30
STATIKA
Slika 3.5 Razlaganje sila poznatog pravca, smjera i intenziteta na
komponente u konkretnim slu
č
ajevima djelovanja su
č
eljnog sistema sila
U oba zadatka, slika 3.5a i 3.5b prvo su definisane reakcije veza, a
zatim je izvršeno slaganje komponentnih sila u zatvoreni poligon-
trougao,
č
ime je potvr
đ
en uslov ravnoteže.
3.3 Projekcije sile na osu i na ravan
Sila
G
F
, kao vektorska veli
č
ina, može se rastaviti na komponente,
odnosno može se projektovati na osu ili na ravan. Projekcija sile
G
F
na
osu je skalarna veli
č
ina, slika 3.6.
Slika 3.6 Projekcija sile na osu
Ortogonalna projekcija sile
G
F
na osu O
x
odre
đ
ena je dužinom ' '
A B
,
koja može biti pozitivna, negativna i jednaka nuli; zavisno od položaja i
orijentacije ose O
x
u odnosu na silu
G
F
.
' '
A B
=
X
=
F
x
=
F
cos
α
..................................................................(3.4)
Ova konstatacija je proistekla iz vektorske algebre gdje projekciju sile
G
F
na osu O
x
definišemo skalarnim proizvodom vektora
G
F
i jedini
č
nog
vektora
G
i
.
G
F
- sila
G
i
- jedini
č
ni vektor
X
=
F
x
–projekcija sile
G
F
na osu 0
x
(skalarna veli
č
ina)

32
STATIKA
Slika 3.8 Projekcija sile na ose
pravokutnog koordinatnog sistema u ravni
Prema tome, za jednozna
č
no odre
đ
ivanje sile
G
F
moramo poznavati
njezine dvije projekcije slika 3.8b (slu
č
aj da sila djeluje u ravni). Prema
slici 3.8b, sila
G
F
definisana je paralelogramom konstruisanim nad
projekcijama
F
x
i
F
y
. Intenzitet sile
G
F
odre
đ
en je slijede
ć
im izrazom:
=
=
+
=
+
G
2
2
2
2
x
y
F
F
F
F
X
Y
........................................................(3.9)
Položaj pravca napadne linije sile
G
F
u ravni Ox
y
odre
đ
en je uglom
α
koji je definisan izrazima:
α
=
=
=
+
+
2
2
2
2
cos
x
x
x
y
F
F
X
F
F
F
X
Y
, ................................................(3.10)
α
=
=
=
+
+
2
2
2
2
sin
y
y
x
y
F
F
Y
F
F
F
X
Y
. ................................................(3.11)
U slu
č
aju da sila
G
F
ne leži u jednoj ravni, to je za njeno definisanje
pravca, smjera i intenziteta u Dekartovom koordinatnom sistemu
neophodno poznavati tri komponente, slika 3.9.
33
3- SU
Č
ELJNI SISTEM SILA
Slika 3.9 Razlaganje sile na tri komponente
F
x
=
=
=
,
y
z
ac F
ad i F
ae
su ortogonalne projekcije sile
G
F
na ose
koordinatnog sistema O
xyz
.
U ovom slu
č
aju intenzitet sile
G
F
je:
=
=
+
+
=
+
+
G
2
2
2
2
2
2
x
y
z
F
F
F
F
F
X
Y
Z
......................................... (3.12)
a pravac sile
G
F
je definisan uglovima
α
,
β
,
γ
.
α
α
⎛
⎞
=
=
⎜
⎟
⎝
⎠
cos
arccos
x
x
F
F
ili
F
F
................................................... (3.13)
β
β
⎛
⎞
=
=
⎜
⎟
⎝
⎠
cos
arccos
y
y
F
F
ili
F
F
................................................... (3.14)
γ
γ
⎛
⎞
=
=
⎜
⎟
⎝
⎠
cos
arccos
z
z
F
F
ili
F
F
.................................................... (3.15)
pri tome je:
α
β
γ
+
+
=
2
2
2
cos
cos
cos
1
............................................................. (3.16)
3.5 Analiti
č
ki uslovi ravnoteže sistema
su
č
eljnih sila
Da bi sistem su
č
eljnih sila bio u ravnoteži, potreban i dovoljan uslov je
da rezultanta sistema bude jednaka nuli.
a) Slu
č
aj ravnog sistema su
č
eljnih sila
Ravnoteža ravnog sistema su
č
eljnih sila odre
đ
ena je izrazima:
=
=
∑
1
0
n
xi
i
F
...................................................................................... (3.17)

35
3- SU
Č
ELJNI SISTEM SILA
Slika 3.10 Su
č
eljni sistem sila u ravni
koji djeluje na ta
č
ku M
Primjeri:
Zadatak 3.1.
Za dati sistem
su
č
eljnih sila, prikazan na slici
3.10, analiti
č
ki i grafi
č
ki
odrediti rezultantu ako je:
F
1
=100 N,
F
2
=200 N,
F
3
=320 N,
F
4
=450 N,
α
1
=45
0
,
α
2
=120
0
,
α
3
=210
0
,
α
4
=300
0
.
Rješenje:
a) Analiti
č
ko rješenje
Projekcije datih sila na ose
koordinatnog sistema
x
O
y
definisane su izrazima:
- osa
x
X
1
=
F
1
cos
α
1
= 100
⋅
cos 45
°
= 100
⋅
0,7071
X
1
= 70,71 N
X
2
=
F
2
cos
α
2
= 200
⋅
cos 120
°
= 200
⋅
(-0,5)
X
2
= -100 N
X
3
=
F
3
cos
α
3
= 320
⋅
cos 210
°
= 320
⋅
(-0,8660)
X
3
= -277,12 N
X
4
= F
4
cos
α
4
= 450
⋅
cos 300
°
= 300
⋅
0,5
X
4
= 225 N
- osa
y
Y
1
=
F
1
sin
α
1
= 100
⋅
sin 45
°
= 100
⋅
0,7071
Y
1
= 70,71 N
Y
2
=
F
2
sin
α
2
= 200
⋅
sin 120
°
= 200
⋅
0,8660
Y
2
= 173,20 N
Y
3
=
F
3
sin
α
3
= 320
⋅
sin 210
°
= 320
⋅
(-0,5)
Y
3
= -160 N
Y
4
=
F
2
cos
α
4
= 450
⋅
sin 300
°
= 450
⋅
(-0,8660)
Y
4
= -389,70 N
Komponente rezultante datog sistema su
č
eljnih sila definisane su
izrazima:
=
=
=
=
+
+
+
=
−
−
+
= −
=
=
+
+
+
=
+
−
−
= −
∑
∑
4
1
2
3
4
1
4
1
2
3
4
1
70,71 100 277,12 225
81,41 N
70,71 173,20 160 389,70
305,79 N
R
i
i
R
R
i
i
R
X
X
X
X
X
X
X
Y
Y
Y
Y
Y
Y
Y
Intenzitet rezultuju
ć
e sile definisan je izrazom:
(
) (
)
=
+
=
−
+ −
=
2
2
2
81,41
305,78
316,44 N
R
R
R
R
R
F
X
Y
F
F
36
STATIKA
S obzirom da je
X
R
<
0 i
Y
R
<
0, rezultuju
ć
a sila
F
R
nalazi se u tre
ć
em
kvadrantu, a njen pravac odre
đ
en je izrazima:
(
)
(
)
α
α
α
α
−
=
=
=
= −
=
+
=
+
=
=
G G
0
'
0
0
0
81,41
cos '
cos ,
cos '
0,257
316,44
180
180
arc cos 0,257
255,09
255 54'
R
R
R
R
R
R
R
X
i F
F
a) Grafi
č
ko rješenje:
Da bi zadatak rješili grafi
č
ki, prvo moramo usvojiti razmjeru za silu,
naprimjer U
F
= 100 N/1 cm, a zatim na osnovu plana položaja (slika
3.11a) nacrtati plan sila nadovezuju
ć
i redom sile
G G G
G
1
2
3
4
, ,
i
F F F
F
kako je
prikazano na slici 3.11b.
Slika 3.11 Grafi
č
ko rješenje zadatka 3.1.
Rezultanta
G
R
F
, datog sistema su
č
eljnih sila, definisana je dužinom
ae
u
okviru plana sila. Intenzitet rezultuju
ć
e sile definisan je izrazom:
=
=
=
=
=
=
=
=
=
=
=
1
2
3
4
100 N
1 cm
'
/
1 cm
'
/
2 cm
/
3,2 cm
/
4,5 cm
F
F
F
F
F
U
ab c c
F U
bc
ac
F U
cd
F U
de
F U

38
STATIKA
Slika 3.13 Djelovanje kolinearnog sistema sila duž ose x
Pravac rezultante
G
R
F
je definisan osom
x
odnosno poklapa se sa
pravcima sila
G G
G
1
2
3
,
F F
i F
, a smjer odgovara pozitivnom smjeru ose x.
Napadna ta
č
ka rezultante
G
R
F
je ta
č
ka
A
.
b) Grafi
č
ko rješenje
Slika 3.14 Grafi
č
ko rješenje zadatka 3.2.
Na osnovu usvojene razmjene za silu U
F
= 100 N/1 cm i plana položaja
(slika 3.14a), crtamo plan sila (slika 3.14b), u razmjeri, crtaju
ć
i sile
redom
G G
G
2
3
1
,
i
F F
F
, na osnovu
č
ega spajaju
ć
i po
č
etak prve sile
G
2
F
i kraj
posljednje sile
G
1
F
, sa smjerom ka kraju posljednje sile, dobijamo
rezultantu
G
R
F
č
iji je intenzitet definisan izrazom:
=
⋅
=
=
100 N
3,5 cm
350 N
1cm
R
F
R
R
F
ad U
F
F
=
=
=
=
=
=
=
2
3
1
100 N
1cm
/
2 cm
/
3 cm
/
1,5 cm
F
F
F
F
U
ab F U
bc
F U
cd
F U
39
3- SU
Č
ELJNI SISTEM SILA
Slika 3.15 Zra
č
ni balon za
mjerenje brzine vjetra
Slika 3.16 Balon
oslobo
đ
en veza
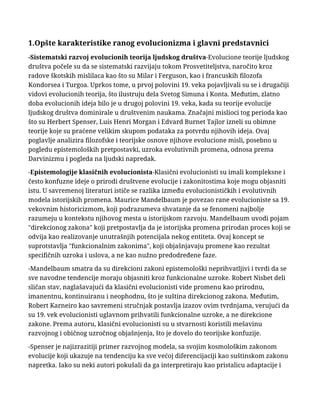
Zadatak 3.3.
Zra
č
ni balon sfernog
oblika i pre
č
nika
=
2 2
D
m,
napunjen helijem, koristi se za
mjerenje brzine vjetra. Balon je
vezan za tlo pomo
ć
u užeta AB
zanemarljive težine i dužine
=
49 2
L
m. Pod dejstvom vjetra
balon se pomjeri tako da mu je
rastojanje od tla
OC
= h = 50 m.
Odrediti silu u užetu i silu vjetra,
ako je ukupna težina balona
G
=
1,85 N i ako na balon djeluje sila
potiska intenziteta
F
p
= 6,3 N.
Smatrati da je sila vjetra
horizontalna.
Rješenje:
a) Analiti
č
ko rješenje
Neka je
G
F
sila kojom vjetar djeluje na
balon, a
G
u
F
sila u užetu. Ako zamislimo
da smo uklonili uže, a njegov uticaj
zamijenili silom
G
u
F
, onda se balon
A
nalazi u ravnoteži pod dejstvom
č
etiri sile,
koje djeluju u istoj ravni i sijeku se u
jednoj ta
č
ki, ta
č
ki O (slika 3.16). Dakle
imamo ravanski sistem su
č
eljnih sila.
Stati
č
ki uslovi ravnoteže za usvojeni
koordinatni sistem, prema slici,
definisani su jedna
č
inama:
∑
X = 0
F
–
F
u
cos
α
= 0.................................................................................. (a)
∑
Y = 0
F
p
–
G
-
F
u
sin
α
= 0 ........................................................................... (b)
Ugao
α
možemo odrediti pomo
ć
u izraza:
α
=
⎛
⎞
+
⎜
⎟
⎝
⎠
sin
2
h
D
L
............................................................................... (c)

41
3- SU
Č
ELJNI SISTEM SILA
Slika 3.18 Šematski prikaz
homogenog cilindra oslonjenog
na glatke stjenke
Presjekom pravaca nepoznatih sila
G
u
F
i
G
F
dobijamo ta
č
ku
d
č
ime je uz
ta
č
ke
a
i
c
definisan intezitet tih sila, odnosno slijedi:
=
⋅
=
=
=
⋅
=
=
1N
6,29 cm
6,29 N
1cm
1N
4,45 cm
4,45 N
1cm
u
F
u
u
F
F
da U
F
F
F
cd U
F
F
Smjerove odre
đ
ujemo tako da dobijemo zatvoren plan sila.
Zadatak 3.4.
Homogeni cilindar težine
G
= 60 N oslanja se u ta
č
ki
A
na
glatku kosu ravan koja zaklapa ugao
α
= 60
0
u odnosu na horizontalu, a u
ta
č
ki
B
, koja se nalazi na itoj
horizontali sa ta
č
kom
A
, oslanja se na
ispust (slika 3.18). Analiti
č
ki i grafi
č
ki
odrediti reakcije kose ravni i ispusta.
Rješenje:
a) Analiti
č
ko rješenje
Na slici 3.19 prikazan je cilindar O
oslobo
đ
en veza, pri
č
emu je uticaj veza
zamjenjen silama
F
A
i
F
B
(reakcijama
veze). Sa slike je vidljivo da na cilindar
djeluje ravanski su
č
eljni sistem sila, za
koje, uz prikazani usvojeni koordinatni
sistem, možemo definisati stati
č
ke
uslove ravnoteže u obliku:
0
sin
sin
0
B
A
X
F
F
α
α
=
−
=
∑
(a)
(a)
0
Y
=
∑
F
B
cos
α
+
F
A
cos
α
-
G
=0
(b)
Iz jedna
č
ine (a) slijedi:
F
B
sin
α
= F
A
sin
α
.............................................................................. (a')
odnosno:
F
A
= F
B
............................................................................................... (c)
Slika 3.19 Homogeni cilindar
oslobo
đ
en veza
42
STATIKA
Ako izraz (c) uvrstimo u jedna
č
inu (b) slijedi:
F
A
cos
α
+
F
B
cos
α
- G = 0 ................................................................ (d)
odnosno:
α
=
2cos
B
G
F
...................................................................................... (d')
Uvrštavanjem broj
č
anih vrijednosti dobijamo:
=
=
=
=
⋅
40
40 N
40 N
2 0,5
B
A
B
F
F
F
b) Grafi
č
ko rješenje
Na osnovu usvojene razmjere za silu
U
F
= 10 N/cm i plana položaja
(slika 3.20a), crtamo plan sila (slika 3.20b), u razmjeri, polaze
ć
i od
poznate sile
G
G
. Zatim kroz po
č
etak sile
G
G
povla
č
imo pravac nepoznate
sile
G
A
F
, a kroz kraj sile
G
G
povla
č
imo pravac nepoznate sile
G
B
F
. Presjek
pravaca
a
i
b
definiše intenzitet sila
G
A
F
i
G
B
F
. U ovom slu
č
aju grafi
č
ko
rješenje je definisano pomo
ć
u trokuta sila.
a) Plan položaja
b) Plan sila
Slika 3.20 Grafi
č
ko rješenje zadatka 3.4.
Intenzitet sila veze definisan je izrazima:
=
⋅
=
=
=
⋅
=
=
10 N
4 cm
40 N
1cm
10 N
4 cm
40 N
1cm
A
F
A
B
F
B
F
ca U
F
F
bc U
F
Smjer sila
G
A
F
i
G
B
F
odre
đ
ujemo na osnovu grafi
č
kog uslova ravnoteže iz
koga slijedi da poligon sila mora biti zatvoren.
=
=
10 N
1 cm
F
F
U
G
ab
U

44
STATIKA
koja sa ta
č
kama
a
i
c
definiše intenzitet sila
G
2
F
i
G
3
F
. Smjer sila
G
2
F
i
G
3
F
slijedi iz uslova da poligon sila mora biti zatvoren.
Slika 3.23 Grafi
č
ko rješenje zadatka 3.5.
Intezitet sila
G
2
F
i
G
3
F
definisan je izrazima:
=
⋅
=
=
≈
=
⋅
=
=
≈
2
2
2
3
3
3
500 N
2,1cm
1050 N 1076, 44 N
1cm
500 N
2, 45cm
1225 N 1243 N
1cm
F
F
F
da U
F
F
F
cd U
F
F
Zadatak 3.6.
Dizalica
ABO
održava se u ravnoteži pomo
ć
u užeta
BC
(slika 3.24). Analiti
č
ki i grafi
č
ki odrediti silu u užetu kao i veli
č
inu,
pravac i smjer reakcije u zglobu
O
, ako je težina obješenog tereta
M
u
ta
č
ki
A
jednaka
G
G
. Dio
OB
dizalice je vertikalan, a uže
BC
ima pravac
AB
.
Slika 3.24 Šematski prikaz dizalice
1
500
1 cm
2,95 cm
1,7 cm
F
F
F
N
U
G
ab
U
F
ab
U
=
=
=
=
=
45
3- SU
Č
ELJNI SISTEM SILA
Dati su podaci:
=
=
= =
= =
=
25,98 m,
20 m,
39,93 m,
40 kN
AB
a
OB
b
AO
c
G
ϕ
=
0
60 .
i
Težinu dizalice zanemariti.
Rješenje:
a) Analiti
č
ko rješenje
Na slici 3.25 prikazana je dizalica oslobo
đ
ena veza, pri
č
emu je uticaj
veza zamijenjen silama
G
G
i
O
B
F
F
(reakcije veze).
G
G
i
O
O
X
Y
predstavljaju
komponente sile
G
O
F
. U ovom slu
č
aju veoma je korisno iskoristiti
teoremu o tri sile koja glasi: ako se slobodno kruto tijelo nalazi u
ravnoteži pod dejstvom triju neparalelnih sila, koje leže u jednoj ravni
onda se napadne linije tih sila moraju sje
ć
i u jednoj ta
č
ki. Osnovne
postavke teoreme predo
č
ene su na slici 3.25. Sa slike je o
č
igledno da
imamo tri nepoznate veli
č
ine:
G
G
O
B
F
i F
i
δ
, ili u drugoj varijanti
G
G
i
O
O
X
Y
i
G
B
F
. Da bi odredili nepoznate veli
č
ine potrebno je postaviti tri
jedna
č
ine koje definišu stati
č
ke uslove ravnoteže. Za usvojeni
koordinatni sistem
x
O
y
uslovi ravnoteže glase:
∑
X = 0
-
X
O
+
F
B
sin
ϕ
= 0 ............................................................................. (a)
∑
Y = 0
Y
O
–
G
-
F
B
cos
ϕ
= 0 .......................................................................... (b)
∑
M
O
= 0
G
⋅
m
-
F
B
⋅
n
= 0................................................................................. (c)
Slika 3.25 Dizalica ABO oslobo
đ
ena veza

47
3- SU
Č
ELJNI SISTEM SILA
β
α
=
sin
sin
o
F
G
te, .............................................................................. (j)
γ
α
=
sin
sin
B
F
G
...................................................................................... (k)
Iz jedna
č
ine (i) slijedi:
β
α
=
sin
sin
c
b
te, .................................................................................. (l)
γ
α
=
sin
sin
a
b
.......................................................................................... (m)
Ako jedna
č
ine (l) i (m) uvrstimo u jedna
č
inu (j) i (k) dobijamo:
=
o
c
F
G
b
............................................................................................ (n)
=
=
39,93
40
79,86 kN
20
o
F
=
B
a
F
G
b
........................................................................................... (o)
=
=
25,98
40
51,96 kN.
20
B
F
b) Grafi
č
ko rješenje:
Usvojivši razmjeru za dužinu
U
L
= 5m/1cm i razmjeru za silu
U
F
= 20
kN/cm, na osnovu plana položaja (slika 3.26a), crtamo plan sila (slika
3.26b). Povla
č
enjem pravca nepoznate sile
G
O
F
kroz po
č
etak poznate sile
G
G
, a pravca nepoznate sile
G
B
F
kroz kraj sile
G
G
, u presjeku dobijamo
ta
č
ku
c
koja definiše trokut sila
abc
, na osnovu koga su definisani
intenziteti sila
G
B
F
i
G
O
F
. Smjer sila
G
B
F
i
G
o
F
definišemo zatvaranjem
poligona, odnosno, trokuta sila. Na planu sila su definisane i
komponente sile
G
O
F
(trougao
acd
) povla
č
enjem pravaca komponenti
G
G
i
O
O
X
Y
kroz kraj, odnosno po
č
etak sile
G
O
F
.
48
STATIKA
Slika 3.26 Grafi
č
ko rješenje zadatka 3.6.
Intezitet sila
G
B
F
i
G
O
F
kao i komponenti
G
G
i
O
O
X
Y
definisan je izrazima:
=
⋅
=
=
=
⋅
=
=
=
⋅
=
=
=
⋅
=
=
20 kN
,
2,6 cm
52 kN
1cm
20 kN
,
4 cm
80 kN
1cm
20 kN
,
2,25 cm
45 kN
1cm
20 kN
3,3 cm
66 kN
1cm
B
F
B
B
O
F
o
O
O
F
o
O
O
F
o
O
F
bc U
F
F
F
ca U
F
F
X
da U
x
X
Y
cd U
y
Y
Zadatak 3.7.
Glatka lopta polupre
č
nika
R
= 1 m i težine
G
= 250 N, dodiruju
ć
i
vertikalni zid, miruje na horizontalnom
podu (slika 3.27). Kolikom silom
G
F
treba pritiskivati na nju preko grede
visine
h
= 0,5 m, da bi se lopta malo
izdignula iznad poda? Sva trenja i težinu
grede zanemariti.
a) Analiti
č
ko rješenje:
Silu
G
F
možemo odrediti ako dati sistem rastavimo na dva podsistema
(podsistem I-lopta i podsistem II-greda).
=
=
=
20 N
1 cm
2 cm
F
F
U
G
ab
U
=
5 m
1 cm
l
U
Slika 3.27 Šematski prikaz
sistema lopta-greda

50
STATIKA
- Greda
Uravnotežena greda kao podsistem na
koju djeluju sile
G
F
,
G
C
F
i
G
N
F
prikazana je
na slici 3.29. Za usvojeni koordinatni
sistem
x
O'
y
stati
č
ki uslovi ravnoteže
definisani su jedna
č
inama:
∑
X = 0
F
-
'
C
F
cos
α
= 0
(e)
∑
Y = 0
F
N
-
'
C
F
sin
α
= 0
(f)
'
C
F
=
F
C
(g)
Uvrstivši jedna
č
inu (g) u jedna
č
inu (e) iz jedna
č
ine (e) slijedi:
F
=
'
C
F
cos
α
=
F
C
cos
α
...................................................................... (h)
Prema slici 3.28:
(
)
α
−
−
−
=
=
=
2
2
2
2
cos
R
R h
R h h
x
R
R
R
...................................... (i)
na osnovu
č
ega je:
−
=
2
2
C
R h h
F
F
R
........................................................................ (j)
Na osnovu (b') i (d') slijedi iz (j) da je:
α
−
−
=
=
=
−
−
=
=
−
−
2
2
2
2
2
2
sin
2
2
.
C
R h h
R h h
G
F
F
R
R
R h h
R h h
G R
G
R h
R
R h
......................................... (k)
Dakle prema uslovima zadatka, sila
G
F
je odre
đ
ena izrazom:
−
≥
−
2
2
R h h
F
G
R h
.............................................................................. (l)
odnosno:
⋅ ⋅
−
≥
≥
−
2
2 1 0,5 0,5
250
433,01 N
1 0,5
F
F
Slika 3.29 Greda
oslobo
đ
ena veza
51
3- SU
Č
ELJNI SISTEM SILA
Iz jedna
č
ine (f) slijedi:
α
α
=
=
'
sin
sin
N
C
C
F
F
F
...................................................................... (m)
odnosno:
F
N
= 500
⋅
0,5 = 250 N
b) Grafi
č
ko rješenje
Silu
G
F
grafi
č
ki možemo odrediti ako definišemo ravnotežu svakog
podsistema posebno. Dobit
ć
emo dva ravanska sistema su
č
eljnih sila za
koje, u slu
č
aju ravnoteže, poligoni sila moraju biti zatvoreni. Usvojivši
razmjeru za silu
U
F
= 200 N/cm, na osnovu plana položaja (slika 3.30a),
crtamo plan sila (slika 3.30b).
Slika 3.30 Grafi
č
ko rješenje zadatka 3.7.
Kod crtanja plana sila u slu
č
aju kugle polazimo od poznate sile
G
G
iz
č
ijeg po
č
etka povla
č
imo pravac nepoznate sile
G
B
F
. Taj pravac u presjeku
sa pravcem nepoznate sile
G
C
F
, koji povla
č
imo iz kraja sile
G
G
, definiše
ta
č
ku
c
. Ta
č
ka
c
sa ta
č
kama
a
i
b
definiše trokut sila
abc
na osnovu
kojeg su odre
đ
eni inteziteti sila
G
C
F
i
G
B
F
. Analogno definišemo sile
G
F
i
G
N
F
, koje djeluju na gredu, polaze
ć
i od poznate sile
= −
G
G
'
C
C
F
F
. Kroz
po
č
etak sile
G
'
C
F
povla
č
imo pravac nepoznate sile
G
N
F
, a kroz kraj sile
G
'
C
F
povla
č
imo pravac nepoznate sile
G
F
. U presjeku tih pravaca definisana
je ta
č
ka
c'
koja sa ta
č
kama
a
' i
b
' definiše trokut sila
a'b'c'
na osnovu
200 N
1 cm
'
1,25 cm
F
C
C
F
U
F
F
G
ab
U
=
=
=
=

53
3- SU
Č
ELJNI SISTEM SILA
∑
Y = 0
F
B
–
F
C
cos
β
- 2
G
= 0 ...................................................................... (b)
∑
M
o2
= 0
-
G
⋅
2
R
⋅
cos
α
+
F
A
⋅
2
R
⋅
sin
α
= 0 .......................................................... (c)
Iz jedna
č
ine (c) slijedi:
α
α
α
=
=
cos
sin
tg
A
G
F
G
............................................................................ (d)
=
=
20
11,55 kN
1,7321
A
F
Silu
G
C
F
odredit
ć
emo iz jedna
č
ine (a):
=
sin
A
C
F
F
β
......................................................................................... (a')
=
=
11 55
16 33 kN
0 7071
C
,
F
,
,
Sila
G
B
F
definisana je jedna
č
inom (b)
F
B
=
F
C
cos
β
+ 2
G
............................................................................. (b')
F
B
= 16,33
⋅
0,7071 + 2
⋅
20 = 51,55 kN
Silu me
đ
usobnog pritiska cilindara I i II
odredit
ć
emo rastavljanjem datog
sistema na dva podsistema (cilindar I i
cilindar II).
Na slici 3.33 prikazan je cilindar I kao
jedan od podsistema na osnovu kojeg
možemo odrediti silu me
đ
usobnog
pritiska cilindara I i II. Za usvojeni
koordinatni sistem
x
O
1
y
stati
č
ki uslovi
ravnoteže za ravanski su
č
eljni sistem
sila na slici glase:
∑
X
= 0
F
D
cos
α
- F
A
= 0................................................................................. (e)
∑
Y
= 0
F
D
sin
α
- G
= 0 .................................................................................. (f)
Slika 3.33 Cilindar I kao
podsistem oslobo
đ
en veza
54
STATIKA
Iz jedna
č
ine (f) slijedi:
α
=
sin
D
G
F
........................................................................................ (f')
=
=
20
23,1 kN
0,86603
D
F
Za izra
č
unatu silu me
đ
usobnog pritiska cilindara I i II
G
D
F
, iz jedna
č
ine
(e) možemo izra
č
unati silu
G
A
F
i izvršiti kontrolu ve
ć
dobijene vrijednosti
za tu silu.
F
A
=
F
D
cos
α
..................................................................................... (e')
F
A
= 23,1
⋅
0,5 = 11,55 kN
Dobili smo identi
č
an rezultat, a to zna
č
i da smo sile
G
G
G
G
,
,
i
A
B
C
D
F F F
F
mogli odrediti analizom stati
č
kih uslova ravnoteže podsistema (cilindar I
i cilidnar II).
b) Grafi
č
ko rješenje
Reakcije u ta
č
kama
A
i
B
, silu u užetu
CO
2
i silu me
đ
usobnog pritiska
cilindara I i II grafi
č
ki možemo odrediti preko podsistema (cilindar I i
cilidnar II)
č
ija ravnoteža uvjetuje ravnotežu sistema u cjelini.
Na osnovu plana položaja (slika 3.34a) usvojene razmjere za silu
U
F
= 10
kN/cm, crtamo plan sila (slika 3.34b).
- Cilindar I
a) Plan položaja b) Plan sila
Slika 3.34 Grafi
č
ko rješenje za cilindar I
Reakcija vertikalnog glatkog zida
G
A
F
i sila me
đ
usobnog pritiska
cilindara
G
D
F
grafi
č
ki su odre
đ
ene pomo
ć
u trokuta sila, odnosno, kroz
=
=
=
5 kN
1cm
4 cm
F
F
U
G
ab
U

56
STATIKA
Zadatak 3.9.
Poklopac parne turbine, težine
G
= 15 kN, podiže se
ravnomjerno pomo
ć
u dizalice kako je prikazano na slici 3.36. Pogonski
dio užeta obrazuje sa horizontalom ugao
α
= 45
0
. Zatege
CB
i
DB
leže u
horizontalnoj ravni i sa vertikalom obrazuju uglove od 45
0
. Odrediti sile
u strijeli
AB
i zategama, ako je ugao
γ
= 30
0
. Kotur
B
smatrati idealnim.
Slika 3.36. Šematski prikaz dizalice
Rješenje:
Slika 3.37. Sistem dizalice razložen na dva podsistema oslobo
đ
en veza
Ako sistem razložimo na dva podsistema kao što je prikazano na slici
3.37, možemo da uo
č
imo da na kotur
B
djeluje prostorni sistem
su
č
eljnih sila. Uticaj zatega i strijela u ovom slu
č
aju zamijenjen je
odgovaraju
č
im reakcijama veze, odnosno silama
G
G
G
,
i
.
BC
BD
AB
F
F
F
Analiti
č
ki uvjeti ravnoteže kotura B, prema slici 3.37a, definisani su
jedna
č
inama:
57
3- SU
Č
ELJNI SISTEM SILA
=
=
=
∑
∑
∑
0
0
0
X
Y
Z
.......................................................................................... (a)
To zna
č
i da rezultanta sila, koje djeluju na kotur B mora biti jednaka
nuli, odnosno:
=
+
+
+
+
=
G
G
G
G
G
G
0
R
AB
BK
U
BC
BD
F
F
F
F
F
F
..................................................... (b)
Poznate sile su
G
G
i
BK
U
F
F
, a nepoznate
G
G
G
,
i
.
AB
BC
BD
F
F
F
Na osnovu jedna
č
ina (a) slijedi:
∑
X = 0
F
BC
sin 45
0
–
F
BD
sin 45
0
= 0 .............................................................. (c)
∑
Y = 0
-
F
BC
cos 45
0
–
F
BD
cos 45
0
–
F
U
cos
α
-
F
AB
sin
γ
= 0 ............................. (d)
∑
Z = 0
-
F
BK
–
F
AB
cos
γ
–
F
U
sin
α
= 0............................................................. (e)
Prema slici 3.37b, možemo da uo
č
imo da na poklopac djeluje sistem
kolinearnih sila, a njihovom projekcijom na osu z dobijamo izraz:
∑
z = 0
− =
'
0
BK
F
G
....................................................................................... (f)
iz koga slijedi da je:
=
'
BK
F
G
............................................................................................ (g)
Uvrštavanjem broj
č
ane vrijednosti u izraz (g) dobijamo da je
=
=
'
15 kN.
BK
F
G
Kako je:
= −
G
G
'
BK
BK
F
F
......................................................................................... (h)
i
=
'
BK
BK
F
F
.......................................................................................... (i)
slijedi da je intenzitet sile
F
BK
= 15 kN.
Kako je kotur
B
idealan kotur iz momentne jedna
č
ine za ta
č
ku O, slika
3.37c, možemo da odredimo silu u užetu
G
u
F
. Momentna jedna
č
ina glasi:

59
RAVANSKI SISTEM
SILA
4.1 Moment sile u odnosu na ta
č
ku
Moment sile u odnosu na ta
č
ku jednak je proizvodu intenziteta sile i
najkra
ć
eg rastojanja od ta
č
ke do sile.
Djelovanje momenta sile na tijelo, uzrokuje obrtanje tijela oko
nepomi
č
ne ta
č
ke, odnosno oko nepomi
č
ne ose. Moment sile koji
uzrokuje obrtanje tijela u smjeru suprotnom od smjera obrtanja
kazaljke na satu je pozitivan (+), odnosno moment koji uzrokuje
obrtanje tijela u smjeru obrtanja kazaljke na satu je negativan, slika
4.1.
Slika 4.1 Moment sile za ta
č
ku
=
⋅
G
G
1
1
M
F h
..................................................................................... (4.1)
= −
⋅
G
G
2
2
M
F h
................................................................................ (4.2)
Moment sile za ta
č
ku "O" je vektorska veli
č
ina i obilježava se sa
G
G
F
o
M
, a
jedinica mjere za moment je
[
Nm
]
.
Prema navedenoj konvenciji, zavisno od smjera obrtanja, moment sile
za ta
č
ku može biti pozitivan ili negativan, slika 4.1.
Prema izrazu (4.1) i (4.2) jasno je, da je intenzitet momenta sile u
odnosu na ta
č
ku jednak dvostrukoj površini trougla konstruisanog
izme
đ
u krajeva vektora sile i momentne ta
č
ke, slika 4.2.
60
STATIKA
Slika 4.2 Geometrijska interpretacija momenta sile za ta
č
ku
Δ
=
⋅ =
⋅
1
1
(
)
2
2
P ABC
AB h
F h
...........................................................(4.3)
=
⋅ =
Δ
G
2
(
)
F
o
M
F h
P ABC
................................................................(4.4)
U slu
č
aju da napadna linija sile
G
F
prolazi kroz momentnu ta
č
ku "O",
tada je intenzitet momenta sile
G
F
za ta
č
ku "O" jednak nuli
(
)
=
G
G
0 .
F
o
M
Moment sile
G
F
u odnosu na momentnu ta
č
ku "O" može se definisati i
preko vektorskog proizvoda vektora sile
G
F
i vektora položaja
G
r
, slika
4.3.
= ×
G
G
G
G
F
o
M
r F
.....................................................................................(4.5)
Slika 4.3 Definicija momenta sile za ta
č
ku preko
vektorskog proizvoda vektora položaja i vektora sile
Sada je intenzitet vektora momenta sile
G
F
, za ta
č
ku "O" odre
đ
en
sljede
ć
im izrazom:
( )
=
=
∠
=
⋅
G
G
G
G
G
G
G
sin
,
.
F
F
o
o
M
M
F
r
F r
F h
.........................................(4.6)
Ako je položaj sile
G
F
definisan u odnosu na referentni koordinatni
sistem O
xyz
,
č
iji se koordinatni po
č
etak poklapa sa momentnom

62
STATIKA
Slika 4.4 Sistem su
č
eljnih sila u ravni xOy
Svaka od sila stvara moment u odnosu na ta
č
ku "0". Kao što je poznato,
intenzitet momenta bilo koje od ovih sila jednak je dvostrukoj površini
odgovaraju
ć
eg trougla. Tako na primjer:
= ⋅ Δ
=
⋅
G
G
1
1
2
(
)
F
o
M
P OAB
OA Y
.............................................................(4.13)
Na isti na
č
in definisan je i intenzitet momenta rezultante
G
R
F
, u odnosu
na momentnu ta
č
ku "0":
= ⋅ Δ
=
⋅
G
G
2
(
)
R
F
o
R
M
P OAR
OA Y
............................................................(4.14)
Kako je
Y
R
jednako algebarskom zbiru vertikalnih projekcija svih sila, to
jest:
=
=
=
+
−
∑
A
3
1
2
3
1
R
i
Y
Y
Y
Y
Y
...................................................................(4.15)
Uvrštavanjem izraza (4.15) u izraz (4.14) dobiva se:
(
)
=
⋅
=
+
−
G
G
1
2
3
R
F
o
R
M
OA Y
OA
Y
Y
Y
odnosno:
=
⋅
+
⋅
−
⋅
G
G
1
2
3
OA Y
R
F
o
M
OA Y
OA Y
=
+
−
G
G
G
G
G
G
G
G
2
3
1
R
F
F
F
F
o
o
o
o
M
M
M
M
............................................................(4.16)
Ovim je postavljena teorema i dokazana.
4.3 Slaganje paralelnih sila u ravni
Neka je dato kruto tijelo, na koje djeluju dvije paralelne sile
G
G
1
2
i
F
F
,
slika 4.5, i neka ove dvije sile leže u istoj ravni.
63
4- RAVANSKI SISTEM SILA
U ovom slu
č
aju ne možemo odrediti njihovu rezultantu neposrednom
primjenom paralelograma sila.
Za slaganje ovih paralelnih sila, odnosno za odre
đ
ivanje njihove
rezultante možemo koristiti slijede
ć
i postupak. Na osnovu drugog
aksioma statike, u napadnim ta
č
kama
A
i
B
sila
G
G
1
2
i
F
F
, doda
ć
emo
par me
đ
usobno uravnoteženih sila
= −
G
G
F
F
, a koje djeluju duž prave
linije koja prolazi kroz napadne ta
č
ke
A
i
B
, slika 4.5.
Slika 4.5 Princip slaganja paralelnih sila u ravni
Slaganjem sila
G
G
1
i
F
F
, a zatim
−
G
G
2
i
F
F
, dobiju se rezultante
G
G
1
2
i
R
R
F
F
. Produženjem njihovih napadnih linija do presjeka u ta
č
ki D,
dobiva se sistem su
č
eljnih sila. Slaganjem ovog sistema su
č
eljnih sila
metodom paralelograma odre
đ
ena je rezultanta
G
R
F
koja je paralelna sa
komponentnim silama
G
G
1
2
i
F
F
. Napadna ta
č
ka rezultante, ta
č
ka
C
,
definisana je presjekom napadne linije rezultante
G
R
F
i prave koja spaja
napadne ta
č
ke
A
i
B
komponentnih sila.
4.4 Rezultanta dvije paralelne sile
Intenzitet rezultante me
đ
usobno paralelnih sila, istoga smjera, jednak je
algebarskom zbiru intenziteta pojedinih komponenata. U ovom slu
č
aju
kada na tijelo djeluju dvije paralelne sile, slika 4.6, intenzitet njihove
rezultante je:
F
R
=
F
1
+
F
2 ...............................................................................................................................
(4.17)
F
1

65
4- RAVANSKI SISTEM SILA
4.5 Spreg sila
Neka na posmatrano tijelo
M
dejstvuju dvije paralelne sile
G
G
1
2
F i F
istog
inteziteta, a suprotnih smjerova kako je prikazano na slici 4.6.
Slika 4.6 Spreg
sila u ravni
Prema izrazu (4.17) rezultanta ove dvije paralelne sile istih intenziteta, a
suprotnih smjerova jednaka je nuli:
F
R
=
F
1
–
F
2
= 0 .............................................................................. (4.27)
dok je položaj rezultante, odnosno njena napadna ta
č
ka prema izrazu
(4.25) u beskona
č
nosti.
=
=
= ∞
2
2
0
R
AB
AB
AC
F
F
F
............................................................... (4.28)
U ovom slu
č
aju i pored toga što je rezultanta sila jednaka nuli, tijelo
ne
ć
e biti u ravnoteži. Zbog toga što se napadne linije sila ne poklapanju
(nisu kolinearne), ove sile stvaraju spreg
č
iji moment nastoji da zakrene
tijelo.
Pod pojmom sprega sila podrazumijeva se sistem od dvije paralelne sile
G
G
1
2
i
F
F
istih intenziteta, a suprotnih smjerova koje djeluju na tijelo, a
č
ije se napadne linije nalaze na rastojanju "
h
".
Osnovni parametri sprega sila su:
a)
Intenzitet momenta sprega sila, definisan je proizvodom inteziteta
jedne sile i normalnog rastojanja izme
đ
u napadnih linija sila "h", slika
4.6.
M
=
⋅ =
⋅
G
G
1
2
F h
F
h
........................................................................ (4.29)
b)
Ravnina djelovanja momenta sprega sila, definisana je ravninom u
kojoj leže sile
G
G
1
2
F i F
.
=
G
G
1
2
F
F
66
STATIKA
c)
Smjer sprega sila definisan je smjerom rezultuju
ć
eg momenta koji
uzrokuje obrtanje tijela. Ukoliko je smjer obrtanja tijela suprotan od
smjera kretanja kazaljke na satu, spreg je pozitivan i suprotno.
M
= ± ⋅
G
F h
......................................................................................(4.30)
Slika 4.7 Osnovne karakteristike sprega sila u ravni
Me
đ
utim, potrebno je napomenuti da moment sprega sila
M
ne zavisi
od izbora obrtne ta
č
ke tijela, koja se nalazi u ravni dejstva sprega, slika
4.7. U ovom slu
č
aju momenti sila za ta
č
ku "0" su:
= − ⋅ = − ⋅
G
1
1
F
o
M
F a
F a
......................................................................(4.31)
(
)
(
)
=
+
=
+
=
=
G
2
2
1
2
, jer je
.
F
o
M
F a h
F a h
F
F
F
.............................(4.32)
Sabiranjem ova dva momenta dobivamo da je:
M
(
)
=
+
= − ⋅ +
⋅
+
G
G
2
1
1
2
F
F
o
o
M
M
F a F
a h
M
(
)
= − ⋅ +
+
=
⋅
F a F a h
F h
...........................................................(4.33)
Iz ovoga proizilazi da algebarski zbir momenata sila iz sprega za bilo
koju ta
č
ku u ravnini dejstva sprega ne zavisi od izbora te ta
č
ke i da je
jednak momentu sprega sila
M
.
Za potpuno definisanje sprega sila potrebno je znati:
-
intenzitet momenta sprega,
-
intenzitet sila koje
č
ine spreg,
-
ravan dejstva sprega,
-
smjer obrtanja tijela (smjer momenta sprega).
Iz navedenog proizilazi da je spreg sila vektorska veli
č
ina i ozna
č
ava se
sa (
G
M
). Vektor momenta sprega sila okomit je na ravan u kojoj leži
spreg sila, slika 4.8.

68
STATIKA
M
1
=
⋅
1
1
F h
....................................................................................(4.36)
M
2
=
⋅
2
2
F h
....................................................................................(4.37)
M
1
=
M
2
=
⋅
=
⋅
1
1
2
2
F h
F h
...............................................................(4.38)
Iz ovoga i prethodnog izlaganja možemo konstatovati da se:
-
dejstvo sprega sila na kruto tijelo ne
ć
e promijeniti ako se spreg
sila pomjeri u bilo koji položaj ravnine dejstva sprega,
-
dejstvo sprega sila se ne
ć
e promjeniti, ako se istovremeno
promijeni intenzitet sila iz sprega i krak sprega tako da intezitet
momenta sprega ostane nepromijenjen.
4.5.2 Slaganje spregova sila
Za slu
č
aj istovremenog djelovanja više spregova sila na kruto tijelo u
istoj ravni važi slijede
ć
a teorema:
Dejstvo sistema spregova koji djeluju na kruto tijelo u jednoj ravni može
se zamijeniti dejstvom jednog rezultuju
ć
eg sprega koji djeluje u istoj
ravni, a
č
iji je moment jednak vektorskom zbiru momenata svih
komponentnih spregova, slika 4.10.
Slika 4.10 Slaganje spregova sila u ravni
Moment rezultuju
ć
eg sprega jednak je vektorskom zbiru momenata
komponentnih spregova:
=
+
+
+
JJG
JJG
JJG
JJG
R
1
2
n
M
M
M
...
M
......................................................(4.39)
U ovom slu
č
aju, s obzirom da svi spregovi leže u istoj ravni, vektori
njihovih momenata su okomiti na tu ravan. Prema prethodnoj teoremi,
pomjeranjem spregova u ravni njihovog djelovanja, može se obezbijediti
69
4- RAVANSKI SISTEM SILA
da momenti svih spregova djeluju u istoj ta
č
ki, odnosno da su vektori
momenata svih spregova kolinearni, slika 4.11.
Slika 4.11 Kolinearnost vektora momenata spregova sila u ravni
Iz ovih razloga može se re
ć
i da je intenzitet momenta rezultuju
ć
eg
sprega jednak algebarskom zbiru momenata komponentnih spregova,
pri tome je neophodno voditi ra
č
una o smjeru momenta spregova, slika
4.11.
Sistem spregova sila, koji djeluje na kruto tijelo u jednoj ravni, bi
ć
e u
ravnoteži ako je intenzitet vektorskog zbira svih komponentnih vektora
jednak nuli.
=
=
=
∑
JJG
JJG
1
0
n
i
M
M
.............................................................................. (4.40)
4.6 Slaganje proizvoljnog sistema sila u ravni
Teorem o paralelnom pomjeranju sile: Dejstvo sile
G
F
na kruto tijelo
ne
ć
e se promijeniti ako silu
G
F
prenesemo paralelno prvobitnom
položaju u bilo koju ta
č
ku tijela i ako pri tome sili
G
F
dodamo
odgovaraju
ć
i spreg
č
iji je moment jednak momentu te sile u odnosu na
ta
č
ku novog položaja, slika 4.12.

71
4- RAVANSKI SISTEM SILA
Slika 4.13 Paralelno pomjeranje sistema sila u zadatu ta
č
ku
=
=
=
G
G
G
G
G
G
'
'
'
1
1
2
2
3
3
;
;
F
F
F
F
F
F
................................................................ (4.43)
=
=
∑
G
G
1
,
n
R
i
i
F
F
..................................................................................... (4.44)
=
=
=
G
G
G
G
G
G
1
1
1
2
2
2
3
3
3
;
;
,
F
a
F
a
F
a
M
M
M
....................................... (4.45)
=
=
∑
G
G
1
n
R
i
i
M
M
.................................................................................. (4.46)
Na osnovu izloženog možemo formulisati slijede
ć
i teorem: Svaki
proizvoljni, ravni sistem sila koji djeluje na kruto tijelo, u opštem
slu
č
aju može se zamijeniti jednom rezultuju
ć
om silom
G
R
F
koja se zove
glavni vektor
i koji djeluje u ta
č
ki redukcije "O" i jednim spregom
č
iji je
moment jednak zbiru momenata svih komponentnih spregova
G
R
M
, a
koji se zove
glavni moment
, slika 4.13b.
Glavni vektor može se odrediti i pomo
ć
u poligona sila kao i analiti
č
kim
putem odre
đ
ivanjem odgovaraju
ć
ih projekcija u Dekartovom
koordinatnom sistemu.
α
=
=
=
=
∑
∑
1
1
cos ,
n
n
xR
xi
i
i
i
i
F
F
F
................................................................. (4.47)
α
=
=
=
=
∑
∑
1
1
sin ,
n
n
yR
yi
i
i
i
i
F
F
F
................................................................. (4.48)
=
+
2
2
.
R
xR
yR
F
F
F
.......................................................................... (4.49)
72
STATIKA
4.8 Svo
đ
enje ravnog sistema sila na prostiji
oblik
U principu svaki sistem sila može se svesti na glavni vektor
G
R
F
i glavni
moment
G
R
M
u odnosu na redukcionu ta
č
ku. Kod svo
đ
enja datog
sistema sila na glavni vektor i glavni moment može nastati više razli
č
itih
slu
č
ajeva koji
ć
e se ovdje prezentovati.
a) Ako su glavni vektor i glavni moment jednaki nuli
=
=
=
∑
G
G
1
0
n
R
i
i
F
F
.................................................................................(4.50)
=
=
=
=
=
∑
∑
G
G
G
G
1
1
0
i
n
n
F
R
i
o
i
i
M
M
M
................................................................(4.51)
Ravni sistem sila se nalazi u ravnoteži.
b) Ako je glavni vektor
G
R
F
jednak nuli, a glavni moment
G
R
M
razli
č
it od nule
=
=
=
∑
G
G
1
0
n
R
i
i
F
F
.................................................................................(4.52)
=
=
=
=
≠
∑
∑
G
G
G
G
1
1
0
i
n
n
F
R
i
o
i
i
M
M
M
................................................................(4.53)
U ovom slu
č
aju ravni sistem sila se svodi na spreg.
c) Ako je glavni vektor
G
R
F
razli
č
it od nule, a glavni moment
G
R
M
jednak nuli
=
=
≠
∑
G
G
1
0
n
R
i
i
F
F
.................................................................................(4.54)
=
=
=
=
=
∑
∑
G
G
G
G
1
1
0
i
n
n
F
R
i
o
i
i
M
M
M
................................................................(4.55)
U ovom slu
č
aju ravni sistem sila se svodi na glavni vektor, odnosno
rezultantu koja prolazi kroz ta
č
ku redukcije "O".
d) Ako je glavni vektor
G
R
F
razli
č
it od nule i glavni moment
G
R
M
razli
č
it od nule
=
=
≠
∑
G
G
1
0
n
R
i
i
F
F
.................................................................................(4.56)

74
STATIKA
=
=
∑
G
1
1
0
n
F
o
i
M
.....................................................................................(4.63)
4.10 Posebni uslovi ravnoteže ravnog sistema
sila
1) Ako na kruto tijelo istovremeno djeluje ravni sistem sila i sistem
spregova, tada su potrebni i dovoljni uslovi ravnoteže dati izrazima:
=
=
∑
1
0
n
xi
i
F
.......................................................................................(4.64)
=
=
∑
1
0
n
yi
i
F
.......................................................................................(4.65)
=
=
+
=
∑
∑
G
G
1
1
0
i
n
n
F
o
i
i
i
M
M
..........................................................................(4.66)
2) Da bi ravni sistem paralelnih sila koji djeluje na slobodno tijelo bio u
ravnoteži, slika 4.15, potrebno je i dovoljno da su ispunjeni slijede
ć
i
uslovi:
=
=
=
=
∑
∑
1
1
0
n
n
yi
i
i
i
F
F
..............................................................................(4.67)
=
=
∑
G
1
0
i
n
F
o
i
M
......................................................................................(4.68)
Slika 4.15 Djelovanje sistema paralelnih sila na slobodno tijelo
3) Da bi proizvoljni ravni sistem od tri sile, koje me
đ
usobno nisu
paralelne, bio u ravnoteži potreban i dovoljan uslov je da trougao sila
bude zatvoren, slika 4.16.
75
4- RAVANSKI SISTEM SILA
Slika 4.16 Djelovanje ravnotežnog sistema tri sile na slobodno tijelo
4) Tijelo, zglobno vezano u jednoj ta
č
ki, na koje djeluje ravni sistem sila
bi
ć
e u ravnoteži, ako je suma momenata svih sila u odnosu na zglobnu
ta
č
ku jednaka nuli, slika 4.17.
Slika 4.17 Uravnoteženo zglobno vezano tijelo
=
=
∑
G
G
1
0
i
n
F
o
i
M
..................................................................................... (4.69)
4.11 Vrste ravnoteže tijela
U prethodnom izlaganju definisani su uslovi ravnoteže krutog tijela.
Me
đ
utim, ravnoteža krutog tijela može biti:
- stabilna
ravnoteža,
- labilna
ravnoteža,
- indiferentna
ravnoteža.
Stabilna ravnoteža tijela
, to je takav ravnotežni položaj kod kojeg ako
tijelo izvedemo iz ravnotežnog položaja, zbog dejstva prisutnih sila, tijelo
se ponovo vra
ć
a u svoj ravnotežni položaj, slika 4.18a.
Labilna ravnoteža tijela
, to je takav ravnotežni položaj kod kojeg, ako
tijelo izvedemo iz ravnotežnog položaja, zbog dejstva prisutnih sila, tijelo
se sve više udaljava od svog prvobitnog ravnoteženog položaja, slika
4.18b.

77
4- RAVANSKI SISTEM SILA
Ovdje
ć
e biti prikazana primjena grafi
č
kih metoda za rješavanje ravnog
sistema sila.
4.12.1 Verižni poligon
Neka na prikazano materijalno tijelo, slika 4.20a, djeluje ravni sistem
sila
G G G
G
1
2
3
4
, ,
i
F F F
F
.
Poligon sila formira se tako što se u odre
đ
enoj razmjeri iz plana položaja
paralelno prenese svaka od sila
G
i
F
, po
č
evši od proizvoljno odabrane
ta
č
ke "
a
", slika 4.20b. Pri tome je:
⋅
=
JJJG
G
1
F
ab U
F
.................................................................................... (4.71)
⋅
=
JJG
G
2
F
bc U
F
.................................................................................... (4.72)
⋅
=
JJG
G
3
F
cd U
F
.................................................................................... (4.73)
⋅
=
JJJG
G
4
F
de U
F
................................................................................... (4.74)
dok je rezultanta sila
G
i
F
(
i
= 1,2,3,4) odre
đ
ena izrazom:
⋅
=
JJG
G
F
R
ae U
F
................................................................................... (4.75)
gdje je U
F
[
Nm
-1
]
razmjera za silu.
Slika 4.20 Grafi
č
ki prikaz plana položaja i poligona sila
78
STATIKA
Da bi odredili položaj rezultante
JJG
R
F
sila
JJG
i
F
(
i
= 1,2,3,4), odaberimo
proizvoljnu ta
č
ku
P
(polna ta
č
ka) i spojimo je sa po
č
etkom i krajem
svake od sila
JJG
i
F
. Duž koje spajaju pol sa krajevima svake sile nazivaju
se polni zraci. Sada je potrebno paralelno prenositi polne zrake do
presjeka sa napadnom linijom odgovaraju
ć
e sile, kako je prikazano na
slici 4.20a. Na ovaj na
č
in formirana izlomljena linija
ABCDE
naziva se
verižni poligon
. Ako produžimo polni zrak "1" i polni zrak "5" dobit
ć
emo ta
č
ku
K
kroz koju prolazi rezultanta
JJG
R
F
sila. Sada se jednostavno
rezultanta
JJG
R
F
sa odre
đ
enim pravcom, smjerom i intenzitetom paralelno
prenese sa poligona sila, slika 4.20b, do prethodno odre
đ
ene ta
č
ke "
K
".
4.12.2 Grafi
č
ki uslovi ravnoteže ravnog sistema sila
Iz prethodnih izlaganja je poznato da
ć
e ravni sistem sila biti u
ravnoteži, ako su glavni vektor (
JJG
R
F
) i glavni momenat (
G
R
M
) sistema sila
jednaki nuli.
Neka na dato tijelo djeluje ravni sistem sila
JJG
i
F
(
i
= 1,2,3) kako je
prikazano na slici 4.21.
Ako ovom sistemu sila dodamo silu
JJG
4
F
, koja je tako odabrana da
zatvara poligon sila slika 4.21b, u tom slu
č
aju glavni vektor sistema sila
JJG
R
F
jednak je nuli
(
)
=
JJG
0
R
F
. Tako
đ
er sa slike 4.21b je jasno da sila
JJG
4
F
odgovara po intenzitetu i napadnoj liniji rezultanti sila
G G
G
1
2
3
,
i
F F
F
, ali
ima suprotan smjer.
Slika 4.21 Grafi
č
ki uslovi ravnoteže sistema sila u ravni

80
STATIKA
Primjeri:
Zadatak 4.1
Rešetkasta dizalica sa zglobom u ta
č
ki
A
može se spuštati
pomo
ć
u zavrtnja
BC
. Zavrtanj je spojen sa rešetkom pomo
ć
u zgloba
B
, a
prolazi kroz navrtku
D
(slika 4.23). Težina rešetke je
G
= 120 kN i u
datom položaju na slici djeluje na rastojanju 5 m od vertikale kroz
ta
č
ku A, a dohvat dizalice, mjeren od vertikale kroz ta
č
ku
A
iznosi 15 m.
Odrediti otpor oslonca
A
i silu u zavrtnju
G
z
F
ako je teret
Q
= 200 kN i
=
=
=
8 m
AB
AD
BD
. Težinu zavrtnja zanemariti.
Slika 4.23 Šematski prikaz rešetkaste dizalice
Rješenje:
a) Analiti
č
ko rješenje
Dizalica oslobo
đ
ena veza,
č
iji je uticaj zamijenjen reakcijama veza,
odnosno silama
G
G
G
,
i
A
A
z
X Y
F
(uz pretpostavku da je vijak napregnut na
zatezanje) prikazana je na slici 4.24. Za uravnoteženi, ravanski
proizvoljni sistem sila koje djeluju na dizalicu i usvojeni koordinatni
sistem
x
O
y
stati
č
ki uslovi ravnoteže definisani su jedna
č
inama:
∑
X
= 0
X
A
–
F
z
cos 60
0
= 0 ............................................................................(a)
∑
Y = 0
Y
A
–
F
z
sin 60
0
–
G
–
Q
= 0 .................................................................(b)
∑
M
A
= 0
F
z
⋅
8 cos 30
0
–
G
⋅
5 –
Q
⋅
15 = 0 .....................................................(c)
81
4-RAVANSKI SISTEM SILA
Slika 4.24 Dizalica oslobo
đ
ena veza
Iz jedna
č
ine (c) možemo odrediti silu u zavrtnju prema izrazu:
+
=
0
5
15
8 cos 30
z
G
Q
F
................................................................................. (c')
⋅
+
⋅
=
=
=
=
=
5 120 15 200
900
3
300 3 kN 519,62 kN
3
3
3
8
2
z
F
Komponente reakcije
G
A
F
u zglobu
A
odredit
ć
emo iz jedna
č
ina (a) i (b).
Iz jedna
č
ine (a) slijedi:
X
A
=
F
z
cos 60
0
................................................................................. (a')
=
=
=
1
300 3
150 3 kN 259,81 kN
2
A
X
a iz jedna
č
ine (b) slijedi:
Y
A
=
F
z
sin 60
0
+
G
+
Q
..................................................................... (b')
=
+
+
=
3
300 3
120 200 770 kN
2
A
Y
Na osnovu komponenti
G
G
i
A
A
X
Y
prema slici 4.24, slijedi intenzitet
reakcije
G
A
F
:

83
4-RAVANSKI SISTEM SILA
Slika 4.25 Grafi
č
ko rješenje zadatka 4.23
Ta
č
ke I i II spajamo Kulmanovom linijom K, koja definiše pravac
pomo
ć
ne Kulmanove sile. Pravac Kulmanove sile definiše pravac
rezultante sila
G
G
i
R
A
F
X
kao i sila
G
G
i
z
A
F
Y
. Polaze
ć
i od ta
č
ke I crtamo
trokut sila
G
G
,
R
A
F
X
i pomo
ć
ne Kulmanove sile. Zatim prelazimo na
ta
č
ku II i pomo
ć
u pomo
ć
ne Kulmanove sile dobijamo veli
č
ine sila
G
G
i
z
A
F
Y
. Smjer obilaženja (ozna
č
en na slici) u dobijenom poligonu sila
odre
đ
en je smjerom sile
G
R
F
. Poligon sila je zatvoren, imamo dakle
ravnotežu sistema. Na taj na
č
in smo dobili veli
č
inu i smjer sile u
zavrtnju
BC
i osloncu
A
. U planu sila na osnovu komponenti
G
G
i
A
A
X
Y
definisana je i sila otpora u osloncu
A
-
G
A
F
.
Intenzitet sila
i
A
A
X
Y
G
G
,
G
G
i
A
z
F
F
definisan je izrazima:
=
⋅
=
=
=
⋅
=
=
100 kN
' '
2,6cm
260 kN
1cm
100 kN
' '
7,7cm
770 kN
1cm
A
F
A
F
X
b c U
Y
c d U
=
100 kN
1cm
F
U
=
⋅
=
⋅
=
⋅
=
' '
100 kN
3,2cm
1cm
320 kN
R
F
F
R
R
F
ac U
a b U
F
F
=
=
=
=
1,2cm
2cm
F
F
G
ab
U
Q
bc
U
=
5 m
1cm
L
U
84
STATIKA
=
⋅
=
=
=
⋅
=
=
100 kN
' '
8,13cm
813kN
1cm
100 kN
' '
5,2cm
520 kN
1cm
A
F
z
F
b d U
F
d a U
Zadatak 4.2
Teret
Q
= 4,8 kN održava se pomo
ć
u užeta na strmoj ravni.
Strma ravan je nagnuta pod uglom
α
= 60
0
prema horizontali. Uže, koje
je paralelno sa strmom ravni, obavijeno je oko doboša vitla
ABC
č
ija je
težina
G
= 2,4 kN. Vitlo se oslanja u ta
č
ki
A
na glatki pod, a u ta
č
ki
B
vezano je za pod pomo
ć
u zavrtnja (slika 4.26). Odrediti otpore oslonaca
vitla zanemaruju
ć
i razmak izme
đ
u užeta i strme ravni: Rastojanje
=
= =
1,7 m.
AO OB a
Slika 4.26 Šematski prikaz vitla sa kolicima
Rješenje:
a) Analiti
č
ko rješenje
Da bi odredili otpore oslonaca moramo dati sistem rastaviti na dva
podsistema (podsistem I – teret
Q
i podsistem II - vitlo).
- Teret
Q
Kolica sa teretom Q, oslobo
đ
ena veza, prikazana su na slici 4.27.
O
č
igledno je da se kolica nalaze u ravnotežnom položaju pod dejstvom
ravanskog sistema su
č
eljnih sila. Stati
č
ki uslovi ravnoteže u tom
slu
č
aju, za usvojeni koordinatni sistem prema slici, glase:
∑
X
= 0
Q
sin
α
-
F
u
= 0 .................................................................................(a)
∑
Y
= 0
F
N
-
Q
cos
α
= 0.................................................................................(b)

86
STATIKA
Slika 4.28 Vitlo oslobo
đ
eno veza
Iz jedna
č
ine (e) slijedi:
=
2
B
G
Y
.............................................................................................(g)
=
=
2,4
1,2kN
2
B
Y
Uvrstivši jedna
č
inu (f) u jedna
č
inu (c) iz jedna
č
ine (c) slijedi:
X
B
=
'
u
F
cos
α
=
F
u
cos
α
...................................................................(h)
X
B
= 4,16
⋅
0,5 = 2,08 kN
Reakciju
G
B
F
izra
č
unavamo prema izrazu:
=
+
2
2
B
B
B
F
X
Y
.................................................................................. (i)
2
2
2,08
1,2
2,4kN
B
F
=
+
=
a pravac djelovanja reakcije
G
B
F
odre
đ
en je jedna
č
inom:
=
tg
B
B
Y
X
ϕ
.........................................................................................(j)
odnosno:
=
arc tg
,
B
B
Y
X
ϕ
...................................................................................(k)
=
=
=
0
0
1,2
arc tg
29,98 ili
29 58'48"
2,08
ϕ
ϕ
ϕ
G
87
4-RAVANSKI SISTEM SILA
Reakciju u ta
č
ki
A
izra
č
unavamo na osnovu jedna
č
ine (d) iz koje slijedi:
F
A
=
'
u
F
sin
α
+
G
–
Y
B
=
F
u
sin
α
+
G
–
Y
B
........................................ (l)
F
A
= 4,16
⋅
0,86603 + 2,4 – 1,2 = 4,8 kN
b) Grafi
č
ko rješenje
Usvojivši razmjeru za silu
U
F
= 1 kN/1 cm, na osnovu plana položaja
(slika 4.29a) prvo definišemo plan sila (slika 4.29b) tereta Q.
a) plan položaj b) plan sila
Slika 4.29 Grafi
č
ko rješenje za kolica sa teretom
U planu sila prvo crtamo poznatu silu
G
Q
. Nakon toga iz po
č
etka sile
G
Q
povla
č
imo pravac nepoznate sile
G
N
F
, a iz kraja sile
G
Q
pravac nepoznate
sile u užetu
G
u
F
. Presjecište tih pravaca daje ta
č
ku
c
, koja sa ta
č
kama
a
i
b
definiše trokut sila iz koga slijedi intenzitet, a zatvaranjem trokuta
sila i smjer nepoznatih sila
G
N
F
i
G
u
F
. Intenzitet definisan je izrazima:
=
⋅
==
=
=
⋅
=
=
1kN
2,4cm
2,4kN
1cm
1kN
4,16cm
4,16kN
1cm
N
F
u
F
F
ca U
F
bc U
Otpore oslonaca grafi
č
ki možemo odrediti na više na
č
ina, me
đ
utim u
ovom primjeru zbog ilustracije metoda, primijenit
ć
emo teoremu o tri
sile. U razmjeri za dužinu
U
L
= 1 m/cm crtamo plan položaja (slika
4.30a). Nakon toga pomo
ć
u plana sila i verižnog poligona definišemo, u
razmjeri, rezultantu spoljašnjih sila
= −
G
G
G
'
i
u
u
F
F
G
,
č
iji je pravac
djelovanja u planu položaja definisan presjecištem prvog i posljednjeg
=
=
=
1kN
1cm
4,8cm
F
F
U
Q
ab
U

89
4-RAVANSKI SISTEM SILA
=
⋅
=
==
=
⋅
=
=
1kN
' '
4,8cm
4,8 kN
1cm
1kN
' '
2,4cm
2,4kN
1cm
A
F
B
F
F
e f U
F
f d U
Zadatak 4.3
Greda AB dužine 2 m, optere
ć
ena je u ta
č
ki A teretom M
težine G = 100 kN. Greda je pomo
ć
u štapova I, II i III u
č
vrš
ć
ena za pod i
vertikalni zid. Veza izme
đ
u štapova i grede, poda i vertikalnog zida
ostvarena je cilindri
č
nim zglobovima (slika 4.31). Zanemaruju
ć
i težinu
grede i štapova kao i trenje u zglobovima, grafi
č
ki, primjenom
Kulmanove metode, odrediti intenzitet, pravac i smjer sila u štapovima
u ravnotežnom položaju sistema.
Slika 4.31 Šematski prikaz grede i njenog u
č
vrš
ć
enja
Rješenje:
Greda
AB
oslobo
đ
ena veza, uz pretpostavku da su štapovi napregnuti
na zatezanje, prikazana je na slici 4.32a. Za crtanje plana položaja
koristimo razmjeru za dužinu
U
L
= 0,5 m/1 cm, a za silu usvajamo
razmjeru
U
F
= 20 kN/1 cm.
Da bi greda
AB
bila u ravnoteži, sile u štapovima I, II i III moraju
uravnotežiti silu
G
F
. Dakle silu
G
F
trebamo rastaviti na tri komponente,
odnosno sile
1
2
3
,
i
F F
F
G G
G
za koje su poznati pravci djelovanja.
Primjenjuju
ć
i Kulmanovu (Culmann) metodu, prvo u planu položaja
(slika 4.32a) definišemo presje
č
ne ta
č
ke IV i V pravaca sila
G
G
G
G
3
1
2
i
te
i
G F
F
F
.
90
STATIKA
Slika 4.32. Grafi
č
ko rješenje zadatka 4.3.
Ta
č
ke IV i V spajamo Kulmanovom linijom
K
, koja definiše pravac
pomo
ć
ne Kulmanove sile. Pravac Kulmanove sile definiše pravac
rezultante sila
G
G
3
i
G F
i pravac rezultante sila
1
2
i
F
F
G
G
. Krenut
ć
emo od
para sila gdje nam je jedna sila poznata:
G
G
3
i
G F
. Silu
G
G
razložit
ć
emo
na dva poznata pravca: sile
3
F
G
i pomo
ć
ne Kulmanove sile. Zatim
prelazimo na par
1
2
i
F
F
G
G
i pomo
ć
u poznate Kulmanove sile dobijamo
trokut sila, koji definiše veli
č
inu sila
G
G
1
2
i
F
F
. Smjer obilaženja (ozna
č
en
na slici) u dobijenom poligonu sila (slika 4.32b) odre
đ
en je smjerom sile
G
G
. Poligon sila je zatvoren, imamo dakle ravnotežu sistema. Na taj
na
č
in je definisan pravac, smjer i intenzitet sila
G G
G
1
2
3
,
i
F F F
.
Intenzitet sila
G G
G
1
2
3
,
F F i F
izra
č
unavamo pomo
ć
u izraza:
=
⋅
=
⋅
=
⋅
=
=
=
=
=
=
1
2
3
1
2
3
1
2
3
,
,
,
20 kN
20 kN
20 kN
10cm
3,55cm
3,55cm
1cm
1cm
1cm
200 kN
71kN
71kN
F
F
F
F
cd U
F
bc U
F
da U
F
F
F
F
F
F
=
=
=
=
0,5 m
1cm
20 kN
1cm
5cm
L
F
F
U
U
G
ab
U

92
STATIKA
Slika 4.34 Dizalica oslobo
đ
ena veza
O
č
igledno je da nam se u dvije jedna
č
ine javljaju tri nepoznate veli
č
ine
(sile
G
G
G
,
i
E
K
F F
G
) koje, iz tih jedna
č
ina, ne možemo odrediti, ali možemo
iskoristiti uslov zadatka da težina kolica, stuba i kašike (
G
)
G
bude
odre
đ
ena iz uslova da za
Q
= 15 kN ne do
đ
e do preturanja dizalice. U
tom slu
č
aju je:
F
E
= 0 ..............................................................................................(c)
a jedna
č
ine (a) i (b) prelaze u oblik:
F
K
–
G
–
Q
= 0 ...................................................................................(d)
G
⋅
1 –
Q
⋅
4 = 0 .................................................................................(e)
Iz jedna
č
ine (e) u tom slu
č
aju slijedi da težina kolica, stuba i kašike
mora biti:
G
≥
4 Q ............................................................................................(f)
odnosno:
G
≥
4
⋅
15 kN G
≥
60 kN
Pri tome je na osnovu jedna
č
ine (e) sila F
K
jednaka:
F
K
=
G
+
Q
........................................................................................(g)
F
K
= 60 + 15 = 75 kN .
93
4-RAVANSKI SISTEM SILA
b) Grafi
č
ko rješenje
Slika 4.35 Grafi
č
ko rješenje zadatka 4.4.
Grafi
č
ko rješenje zadatka svodimo na primjenu verižnog poligona. Na
osnovu usvojene razmjere za dužinu U
L
= 1 m/1 cm crtamo plan
položaja (slika 4.35a) isti
č
u
ć
i bitne geometrijske veli
č
ine (rastojanja
izme
đ
u pravaca sila). Usvojivši razmjeru za silu U
F
= 15 kN/1 cm na
osnovu plana položaja definišemo plan sila (slika 4.35b), crtaju
ć
i u
planu sila prvo poznatu silu
G
G
. Zatim u planu sila proizvoljno biramo
pol
P
i povla
č
imo polne zrake 1 i 4. U planu položaja iz proizvoljno
izabrane ta
č
ke I na pravcu sile
G
G
povla
č
imo paralelne pravce koji u
ta
č
kama II i III sijeku pravce sila
G
K
F
i
G
G
. Ako ta
č
ke II i III spojimo dobit
ć
emo završnu stranicu ili zaklju
č
nicu verižnog poligona z. Povla
č
e
ć
i
pravac paralelan zaklju
č
ci z iz pola
P
, u planu sila, dobijamo veli
č
inu
traženih sila
G
K
F
i
G
G
, definisanu presjekom zaklju
č
nice z i vertikalnog
pravca (koji definiše pravce sila
G
K
F
i
G
G
) povu
č
enog iz kraja sila
G
G
(ta
č
ka
b
).
Intenzitet sila
G
K
F
i
G
G
definisan je izrazima:
=
⋅
=
⋅
=
=
=
=
,
15 kN
15 kN
5cm
4cm
1cm
1cm
75 kN
60 kN
K
F
F
K
K
F
cd U
G bc U
F
G
F
G
=
=
=
=
1m
1cm
15 kN
1cm
1cm
L
F
F
U
U
Q
ab
U

95
4-RAVANSKI SISTEM SILA
Na slici 4.38 prikazani su štapovi
AB
i
CD
oslobo
đ
eni veza
č
iji je uticaj
zamijenjen reakcijama veza.
Slika 4.38 Štapovi kao podsistemi oslobo
đ
eni veza
Stati
č
ki uslovi ravnoteže za štap AB (slika 4.38a) za usvojeni
koordinatni sistem xOy definisani su jedna
č
inama:
=
∑
0
X
−
=
'
0
A
D
X
X
..................................................................................... (a)
=
∑
0
Y
−
−
−
=
'
0
A
D
Y
Y
G Q
........................................................................... (b)
A
A
A
A
A
96
STATIKA
=
∑
0
A
M
α
α
α
α
−
− ⋅
⋅
−
⋅
⋅
−
⋅
⋅
=
'
'
cos
cos
' sin
' cos
0
2
D
D
AB
G
Q AB
X
AD
Y
AD
........(c)
Stati
č
ki uslovi ravnoteže za štap
CD
(slika 4.38b) za usvojeni
koordinatni sistem xOy definisani su jedna
č
inama:
=
∑
0
X
−
=
0
D
C
X
X
......................................................................................(d)
=
∑
0
Y
+
−
=
0
C
D
Y
Y
G
..................................................................................(e)
=
∑
0
C
M
β
β
β
+
⋅
⋅
−
⋅
⋅
=
cos
sin
cos
0.
2
D
D
CD
G
X
CD
Y
CD
................................(f)
Uz navedene sisteme jedna
č
ina važe i jedna
č
ine:
=
'
,
D
D
X
X
..........................................................................................(g)
=
'
,
D
D
Y
Y
............................................................................................(h)
=
'
,
D
D
F
F
...........................................................................................(i)
=
+
2
2
,
D
D
D
F
X
Y
.................................................................................(j)
γ
=
tg
,
D
D
Y
X
........................................................................................(k)
γ
=
arc tg
,
D
D
Y
X
...................................................................................(l)
=
+
2
2
,
A
A
A
F
X
Y
.................................................................................(m)
ϕ
=
tg
,
A
A
Y
X
........................................................................................(n)
ϕ
=
arc tg
,
A
A
Y
X
..................................................................................(o)
=
+
2
2
,
C
C
C
F
X
Y
.................................................................................(p)
δ
=
tg
,
C
C
Y
X
........................................................................................(r)
δ
=
arc tg
,
C
C
Y
X
...................................................................................(s)

98
STATIKA
Negativni predznak u rezultatu ukazuje na pogrešnu pretpostavku o
naprezanjima štapova, odnosno smjer djelovanja sile
= −
G
G
'
D
D
Y
Y
je
suprotan od nazna
č
enog na slici.
Iz jedna
č
ine (f') slijedi:
β
β
β
⎛
⎞
−
⎜
⎟
⎛
⎞
⎝
⎠
=
=
−
⎜
⎟
⎝
⎠
cos
2
tg
2
sin
D
D
D
G
Y
CD
G
X
Y
c
CD
⎛
⎞
= −
−
⋅
⎜
⎟
⎝
⎠
= −
500
968,03
1
2
1218,03 .
D
D
X
X
N
Sila
= −
G
G
'
D
D
X
X
tako
đ
e, prema predznaku, djeluje suprotno od
nazna
č
enog smjera.
Na osnovu jedna
č
ine (j) intenzitet sile u zglobu D iznosi:
(
) (
)
=
+
=
−
+ −
2
2
2
2
1218,03
968,03
D
D
D
F
X
Y
F
D
= 1555,85 N
=
=
'
1555,85 N
D
D
F
F
a pravac djelovanja sile
= −
G
G
'
D
D
F
F
definisan je jedna
č
inom (l) iz koje
slijedi:
(
)
γ
γ
γ
−
=
=
−
=
=
0
0
968,03
arc tg
arc tg
1218,03
38,48
38 28 '48 ".
D
D
Y
X
ili
Iz jedna
č
ina (a) i (d) slijedi:
=
'
A
D
X
X
...........................................................................................(a')
X
C
=
X
D
............................................................................................(d')
odnosno:
=
=
=
'
A
C
D
D
X
X
X
X
...........................................................................(w)
=
=
=
= −
'
1218,03
A
C
D
D
X
X
X
X
N
Dakle i sile
G
G
i
A
C
X
X
imaju suprotan smjer od smjera nazna
č
enog na
slici.
99
4-RAVANSKI SISTEM SILA
Sile
G
G
i
A
C
Y
Y
izra
č
unavamo iz jedna
č
ina (b) i (e) iz kojih slijedi:
=
+
+
'
A
D
Y
Y
G Q
................................................................................ (b')
Y
C
= G –
Y
D
....................................................................................... (e')
odnosno:
Y
A
= -968,03 + 500 + 2000 = 1531,97 N
Y
C
= 500 – (-968,03) = 1468,03 N
Intenzitet i pravac djelovanja sila
G
G
i
A
C
F
F
definisan je jedna
č
inama (m),
(o), (p) i (s) na osnovu kojih prema slici 4.38 slijedi:
(
)
(
)
ϕ
ϕ
ϕ
=
+
=
−
+
=
=
=
−
= −
= −
2
2
2
2
0
0
1218,03
1531,97
1957,17
1531,97
arc tg
arc tg
1218,03
51,51
51 30 '38 "
A
A
A
A
A
F
X
Y
N
Y
X
ili
(
)
δ
δ
δ
=
+
=
−
+
=
=
=
=
=
2
2
2
2
0
0
1218,03
1468,03
1907,54
1468,03
arc tg
arc tg
1218,03
50,32
50 19'12"
C
C
C
C
C
F
X
X
N
Y
X
ili

101
4-RAVANSKI SISTEM SILA
Slika 4.40 Homogena plo
č
a oslobo
đ
ena veza
Iz jedna
č
ina (b) i (c) slijedi:
F
1
= F
A
cos 45
0
– F sin 60
0
– G.......................................................... (b')
M
=
−
−
0
1
sin 45
2
A
b
G
F
F
a
a
................................................................. (c')
Izjedna
č
avanjem desnih strana jedna
č
ina (b') i (c') dobijamo:
M
−
−
=
−
−
0
0
0
cos 45
sin60
sin 45
2
A
A
b
G
F
F
G
F
a
a
............................... (d)
odnosno:
M
+
−
=
⎛
⎞
−
⎜
⎟
⎝
⎠
0
0
0
sin60
2
,
cos 45
sin 45
A
G
F
a
F
b
a
............................................................... (e)
⋅
+
−
=
⎛
⎞
−
⎜
⎟
⎝
⎠
=
200
60
400 0,86603
2
0,4
0,3
0,70711
0,70711
0,4
1676,75 .
A
A
F
F
N
Iz jedna
č
ine (b') možemo izra
č
unti intezitet sile u štapu I:
F
1
=
F
A
cos 45
0
–
F
sin 60
0
–
G
=
= 1676,75
⋅
0,70711 – 400
⋅
0,86603 – 200
F
1
= 639,23 N
102
STATIKA
Silu u štapu II možemo izra
č
unati iz jedna
č
ine (a) prema kojoj slijedi:
F
2
= -
F
A
sin 45
0
–
F
cos 60
0
.............................................................(a')
F
2
= - 1676,75
⋅
0,70711 – 400
⋅
0,5 = - 1385,65 N.
Prema predznaku o
č
igledno je da sila
G
2
F
ima suprotan smjer, odnosno
štap II napregnut je na pritisak.
b) Grafi
č
ko rješenje
U ovom slu
č
aju možemo da primijenimo Kulmanovu (
Culmann
) metodu,
odnosno imamo slu
č
aj kada je potrebno silu poznatog pravca,
intenziteta i smjera rastaviti na tri komponente poznatog pravca
djelovanja. Na osnovu usvojene razmjere za dužinu U
L
= 1 cm/1 mm
prvo crtamo plan položaja (slika 4.41a) a nakon toga, usvojivši razmjeru
za silu U
F
= 200 N/1 cm, crtamo planove sila (slika 4.41b). Kod crtanja
plana položaja da bi primijenili Kulmanovu metodu prvo smo izvršili
rastavljanje datog sprega
M
i sile
G
G
(težina plo
č
e) pri
č
emu dobijamo
silu koja je po pravcu, smjeru i veli
č
ini jednaka
G
G
(d=
M
/G=0,3m).
Dakle, sada na plo
č
u djeluju samo sile
G
F
i
G
G
ta
č
no definisanog pravca,
smjera, intenziteta i napadnih ta
č
aka (slika 4.41a). Da bi plo
č
a bila u
ravnoteži sile u štapovima moraju uravnotežavati silu
G
R
F
koja
predstavlja rezultantu sila
G
F
i
G
G
. Sila
G
R
F
je u planu sila odre
đ
ena kao
zbir vektora sila
G
F
i
G
G
. Izborom pola
P
definisane su polne zrake 1, 2 i
3 na osnovu kojih, povla
č
e
ć
i zraku 1 i 2 iz proizvoljno izabrane ta
č
ke
L
na pravcu sile
G
G
, u planu položaja definišemo verižni poligon.
Presjekom prve i zadnje stranice verižnog poligona (ta
č
ka
M
) definisana
je ta
č
ka na pravcu rezultante
G
R
F
. Kroz ta
č
ku
M
paralelno sili
G
R
F
u
planu sila, povla
č
imo pravac koji definiše silu
G
R
F
u planu položaja.
Treba ista
č
i da se pravac rezultante
G
R
F
u planu položaja mogao
definisati jednostavnije ta
č
kom S koja predstavlja presje
č
nu ta
č
ku
pravaca sila
G
F
i
G
G
, a ujedno je ta
č
ka koja mora ležati na pravcu
rezultante
G
R
F
. Kada smo definisali položaj rezultante
G
R
F
u planu
položaja, dalje primjenjujemo Kulmanovu metodu odnosno rezultantu
G
R
F
rastavljamo na njene tri komponente
G G
G
1
2
,
i
A
F F
F
č
iji su pravci
djelovanja poznati. U tu svrhu definišemo presje
č
ne ta
č
ke III i IV
pravaca sila
G
R
F
i
G
A
F
te
G
G
1
2
i
.
F
F
Ta
č
ke III i IV spajamo Kulmanovom
linijom K, koja definiše pravac pomo
ć
ne Kulmanove sile, pri
č
emu
pravac Kulmanove sile definiše pravac rezultante sila
G
R
F
i
G
A
F
kao i sila
G
G
1
2
i
.
F
F
Polaze
ć
i od ta
č
ke III crtamo trokut sila
G
R
F
,
G
A
F
i pomo
ć
ne
Kulmanove sile. Zatim prelazimo na ta
č
ku IV i pomo
ć
u pomo
ć
ne

104
STATIKA
Primjer 4.7
Homogena greda AB težine
G
, dužine 2l oslanja se krajem A
na vertikalni glatki zid. Drugi kraj B pridržava uže, koje u
č
vrš
ć
eno u
ta
č
ki C (sl. 4.42).
Za ravnotežni položaj potrebno je izra
č
unati:
- silu u užetu
S
,
- reakciju u osloncu A i
- ugao
α
koji mora zatvarati greda u odnosu na zid.
Zadano je
G
= 500 N,
β
=45
°
.
Slika 4.42 Homogena greda
Rješenje:
a) Analiti
č
ko rješenje
Greda prikazana na slici 4.43 oslobo
đ
ena je veza. Uticaj veza je
zamijenjen reakcijama. Prikazani sistem predstavlja djelovanje sila u
ravni. Da bi sistem bio u ravnoteži mora zadovoljavati tri poznata uslova
ravnoteže u ravni:
A
0
sin
0
X
F
S
β
=
− ⋅
=
∑
..............................................................(a)
0
cos
0
Y
S
G
β
=
⋅
−
=
∑
...............................................................(b)
B
A
0
0
M
G x F
y
=
⋅ −
⋅ =
∑
...............................................................(c)
Iz jedna
č
ine (b) dobivamo vrijednost sile u užetu:
500 2
707,1 N
cos
G
S
β
=
=
=
Iz jedna
č
ine (a) je:
A
A
sin
sin
cos
500 N
G
F
S
G tg
F
β
β
β
β
= ⋅
=
=
⋅
=
105
4-RAVANSKI SISTEM SILA
Slika 4.43 Homogena greda oslobo
đ
ena veza
Rastojanja x i y su sa slike:
sin
2 cos
x l
y
l
α
α
= ⋅
=
⋅
Jedna
č
ina (c) daje:
α
β
α
α
α
α
α
⋅ ⋅
− ⋅
⋅
⋅
=
−
=
=
=
°
sin
2 cos
0
sin
2 cos
0
2
54,7
G l
G tg
l
tg
b) Grafi
č
ko rješenje:
Reakcije
F
A
i
S
odredi
ć
e se tako da se vektor
G
rastavi na dva poznata
pravca, pravac
F
A
i
S
. Kroz ta
č
ku a vektora
G
povu
č
e se pravac
paralelan
F
A
, a kroz ta
č
ku b pravac paralelan
S
. Presje
č
na ta
č
ka ta dva
pravca je c i ona odre
đ
uje intenzitete vektora
F
A
i
S
. Da bi greda AB bila
u ravnoteži aktivna sila
G
i reakcije
F
A
i
S
moraju zatvarati trokut sila.
Na taj na
č
in grafi
č
kim putem odre
đ
eni su smjer i intenzitet reakcija, a
pravci su ta
č
no odre
đ
eni prilikom osloba
đ
anja tijela od veza.

107
4-RAVANSKI SISTEM SILA
BX
1
sin -
cos
100N
F
F
F
α
α
=
⋅
⋅
=
Iz jedna
č
ine (b) dobivamo:
α
α
=
−
−
=
1
cos
sin
200 N
By
F
G F
F
2
2
2
2
B
BX
BY
= 100 +200 =100 5 kN
F
F
F
=
+
b) Grafi
č
ko rješenje
100N
1cm
200N
201N
F
F
B
F
U
F
da U
F
cd U
=
=
⋅
=
=
⋅
=
Na plo
č
u djeluju sila težine
G
G
i poznata sila
1
F
G
. Rezultanta te dvije sile je
R
G
koja ima po
č
etak u po
č
etku prve nanesene sile (ta
č
ka a), a kraj u
kraju druge nanesene sile (ta
č
ka c). Pravac rezultante prolazi kroz
presje
č
nu ta
č
ku sila
1
F
G
i
G
G
(ta
č
ka M na slici 4.45). Rezultantu
R
G
treba
rastaviti na pravac sile
F
G
koji je poznat i pravac
B
F
G
koji treba prethodno
odrediti. Da bi plo
č
a bila u ravnoteži pravci
R
G
,
F
G
i
B
F
G
moraju se sje
ć
i
u jednoj ta
č
ki (ta
č
ka N). Ta
č
ka N je presje
č
na ta
č
ka
F
G
i
R
G
, a kroz tu
ta
č
ku i ta
č
ku B prolazi pravac reakcije
B
F
G
. Pošto su poznata oba pravca
sila
F
G
i
B
F
G
ostaje da se
R
G
razloži na 2 poznata pravca. Smjerovi
F
G
i
B
F
G
su takvi da sa
R
G
zatvaraju trokut sila.
Slika 4.46 Plan sila
b
a
d
c
F
1
F
B
F
R
G
108
STATIKA
Primjer 4.9
Homogena plo
č
a oblika jednakokrakog trougla težine 3
G
,
klizi bez trenja po unutrašnjoj strani cilindra glatke površine
polupre
č
nika
r
. U tjemenu C plo
č
a nosi teret
G
1
(slika 4.47). Odrediti
položaj ravnoteže (ugao
ψ
) uzimaju
ć
i da je AB=BC=
r
. Kolika je
minimalna težina tereta za slu
č
aj da sila dodira u ta
č
ki A bude jednaka
nuli?
Slika 4.47 Plo
č
a u obliku jednakokrakog trougla
Rješenje:
Analiti
č
ko rješenje
Plo
č
a, oslobo
đ
ena veza, sa aktivnim silama težine 3
G
G
i tereta
1
G
G
, koje
djeluju na plo
č
u, prikazana je na slici 4.48.
Slika 4.48 Plo
č
a oslobo
đ
ena veza
Č
etverougao ABCO je romb:
OO
1
=O
1
B=
r
/2
2
2
OT=OB-BT= -
3 2
3
r
r
r
=
Uslov ravnoteže trougaone plo
č
e je da nema obrtanja u ravni:
O
1
sin(60
) 3
OT sin
0
M
G r
G
ψ
ψ
=
⋅ ⋅
° −
−
⋅
⋅
=
∑
.....................................(a)

110
STATIKA
Slika 4.50 Prizmati
č
ni štap AB
Rješenje:
a) Analiti
č
ko rješenje
Uslov ravnoteže tijela u ravni je da je glavni vektor svih sila jednak nuli i
da je moment glavnog vektora za bilo koju ta
č
ku ravni jednak nuli.
Prethodni zahtjevi daju tri uslova ravnoteže u ravni (slika 4.51b):
0
sin
0
A
C
X
F
F
α
=
−
=
∑
.......................................................(a)
0
cos
0
C
Y
F G F
α
=
+
−
=
∑
....................................................(b)
1
0
cos
cos
0
cos
2
A
C
a
M
F
G
F l
α
α
α
=
−
− ⋅ ⋅
=
∑
.........................(c)
Iz jedna
č
ine (b) dobiva se:
cos
C
F G
F
α
+
=
.......................................................................................(b')
Uvrštavanjem (b') u jedna
č
inu (c) dobiva se:
2
3
3
3
cos
cos
0/ cos
cos
cos
2
(
)
cos
cos
0
2
(
)
(
)cos
2
F G
a
l
G
F l
l
F G a G
F l
l
F G a
G
F l
α
α
α
α
α
α
α
α
+
⋅
−
− ⋅ ⋅
=
⋅
+
⋅ −
− ⋅ ⋅
=
+
⋅ =
⋅ + ⋅
3
3
(
)
(50 70) 40
48
cos
0,505
50 50 70 100
95
2
cos
0,505
cos
0,796
37,25
F G a
l
G
Fl
α
α
α
α
+
+
⋅
=
=
=
=
⋅
+
⋅
+
=
=
=
°
A
a
α
B
F
C
l
111
4-RAVANSKI SISTEM SILA
Jedna
č
ina (b') daje intenzitet reakcije
C
F
G
:
120
150,75 N
cos
cos
C
F G
F
α
α
+
=
=
=
.
Jedna
č
ina (a) ) daje intenzitet reakcije
A
F
G
:
sin
90,79 N
A
C
F
F
α
=
=
.
b) Grafi
č
ko rješenje
A
C
25N
1cm
cd
90,8 N
da
150,8N
F
F
F
U
F
U
F
U
=
=
⋅
=
=
⋅
=
Sile
G
G
i
F
G
su poznate i one se u usvojenoj razmjeri nanose (slika 4.51a).
Duž ab predstavlja silu
G
G
, a duž bc predstavlja silu
F
G
. Iz ta
č
ke c
povla
č
i se poznati pravac sile
A
F
G
. Iz ta
č
ke a povla
č
i se poznati pravac
sile
C
F
G
. U presjeku ova dva pravca dobiva se ta
č
ka d . Duž cd odre
đ
uje
intenzitet sile
A
F
G
, a duž ad intenzitet sile
C
F
G
. Smjer sila odre
đ
en je
uslovom ravnoteže: kako je glavni vektor sila jednak nuli to
ć
e sve
prikazane sile praviti zatvoren poligon sila. Na slici sila
A
F
G
ima smjer
od c ka d i sila
C
F
G
smjer od d ka a.
Slika 4.51a Plan sila
Slika 4.51b
A
a
α
B
F
C
l
F
C
F
A

113
4-RAVANSKI SISTEM SILA
0
cos
cos
0
2
O
M
G R
Q R
α
α
=
⋅ ⋅
− ⋅ ⋅
=
∑
................................. (b)
Vrijede trigonometrijski izrazi:
2
2
cos
cos
sin
2
2
α
α
α
=
−
..................................................................... (c)
2
2
sin
1 cos
2
2
α
α
= −
............................................................................ (d)
Izraz (c) se uvrštava u (b):
2
2
cos
sin
cos
0
2
2
2
G
G
Q
α
α
α
⋅
− ⋅
−
=
.................................................... (b')
Izraz (d) se uvrštava u (b')
2
2
cos
(1 cos
)
cos
0
2
2
2
G
G
Q
α
α
α
⋅
−
−
− ⋅
=
.............................................. (b'')
2
2
2
2
2
2
cos
cos
0
2
2
8
cos
2
4
50
50
8 100
cos
0,842
2
4 100
G
Q
G
Q
Q
G
G
α
α
α
α
⋅
−
⋅
−
=
+
+
=
+
+ ⋅
=
=
⋅
32,5
65
2
α
α
=
°
=
°
Za izra
č
unatu vrijednost ugla
α
, iz izraza (a') može se izra
č
unati
vrijednost reakcije
N
G
:
sin32,5
63,6N
cos 65
Q
N
⋅
°
=
=
°
114
STATIKA
Primjer 4.12
Kvadratna plo
č
a težine
G
= 20 kN obješena je pomo
ć
u
užeta DE za ta
č
ku E vertikalnog glatkog zida, na koji se oslanja u ta
č
ki
A. Odrediti ravnotežni položaj užeta, odnosno plo
č
e (ugao
α
), silu u
užetu DE i reakciju zida u ta
č
ki A (slika 4.53).
Slika 4.53 Kvadratna plo
č
a
Slika 4.54 Plo
č
a u ravnotežnom
položaju
Rješenje:
Analiti
č
ko rješenje
Uslovi ravnoteže plo
č
e ABCD su:
0
sin
0
A
X
F
S
α
=
−
=
∑
......................................................(a)
0
cos
0
Y
S
G
α
=
−
=
∑
........................................................(b)
2
0
2
cos
cos(45
) 0
2
E
A
a
M
F
a
G
α
α
=
⋅
⋅
−
−
=
∑
........................(c)
Sre
đ
ivanjem izraza (c) dobiva se:
2
2
cos
cos(45
) 0
2
2
2
cos
(cos 45 cos
sin45 sin ) 0
2
A
A
F
G
F
G
α
α
α
α
α
−
° −
=
−
°
+
°
=

116
STATIKA
Primjer 4.13
Valjak radijusa r i težine
G
privezan je pomo
ć
u užeta za
nepomi
č
nu horizontalnu ravninu prema slici 4.55. Kolika je reakcija
podloge u ta
č
ki E, ako je poznata sila u užetu
S
i ako je zadano
AE=EB=
a
?
Slika 4.55 Valjak
Rješenje:
Analiti
č
ko rješenje
Valjak je oslobo
đ
en veza. Njihov uticaj je zamijenjen reakcijama. U
planu položaj na slici 4.56 nanijete su reakcije veza i aktivna sila težine.
Slika 4.55 Valjak u ravnotežnom položaju
Stati
č
ki uslovi ravnoteže su:
1
2
0
sin
sin
0
X
S
S
β
β
=
−
+
=
∑
............................................(a)
0
2 cos
0
Y
N G
S
β
=
−
−
=
∑
...............................................(b)
Iz izraza (a) dobiva se da je vrijednost sila u užetima jednaka:
1
2
S
S
S
=
=
........................................................................................(a')
Izraz (b) daje intenzitet reakcije podloge
N
G
:
2 cos
N
S
G
β
=
+
................................................................................(b')
117
4-RAVANSKI SISTEM SILA
Odredi
ć
e se veza izme
đ
u uglova
α
i
β
na osnovu geometrije na slici 4.55:
2
2
2
2
2
90
2
cos
cos(90
2 ) sin2
tg
2 tg
sin2
cos
1 tg
2
2
cos
1
OAC
OAE
r
a
r
a r
a
r
a
r
a
α
β
α
β
α
α
α
α
α
β
α
β
=
=
=
° −
=
° −
=
=
⋅
=
=
+
⋅ ⋅
=
=
+
+
)
)
Uvrštavaju
ć
i vrijednost za cos
β
dobiva se vrijednost reakcije podloge
N
G
:
2
2
4
= +
a r
N G S
a
r
⋅ ⋅
+
Primjer 4.14
Na polukružni ležaj u njegovoj ta
č
ki A djeluje sila
F
=
20 2
N,
č
ija napadna linija gradi ugao
α
=45
°
prema vertikali (slika
4.56). Odrediti veli
č
ine reakcija kuglica B i C kao i oslonca D grafi
č
ki i
analiti
č
ki.
Slika 4.56 Polukružni ležaj
Rješenje:
a) Analiti
č
ko rješenje
Prvo se uklone veze prstena sa okolinom. Njihovo djelovanje zamijeni se
reakcijama (slika 4.57). Da bi prsten bio u ravnoteži pod uticajem
aktivnih sila i reakcija moraju biti zadovoljeni uslovi ravnoteže u ravni:
0
sin45
cos 60
cos 60
0
B
C
X
F
F
F
=
° +
° −
° =
∑
............................ (a)

119
4-RAVANSKI SISTEM SILA
dvije nepoznate sile
i
C
D
F
F
G
G
(ta
č
ka N). Kroz ta
č
ke N i M povu
č
e se
Kulmanova linija. Da bi polukružni ležaj bio u ravnoteži oba para sila
(
F
G
,
B
F
G
i
C
F
G
,
D
F
G
) moraju imati rezultatu koja leži u pravcu Kulmanove
linije. Te dvije rezultante morat
ć
e biti istog intenziteta, a suprotnog
smjera. Time
ć
e se njihovo djelovanje me
đ
usobno poništiti i ležaj
ć
e biti
u ravnoteži.
Pri grafi
č
kom odre
đ
ivanju nepoznatih sila krene se od para gdje je
poznata jedna sila. U ovom slu
č
aju to je par
F
G
,
B
F
G
. Sila
F
G
se rastavi
na poznati pravac sile
B
F
G
i na pravac Kulmanove linije (slika 4.58). U
presjeku navedenih pravaca dobiva se ta
č
ka c. Njome su odre
đ
eni
intenziteti sile
B
F
G
i rezultante prvog para sila
K
G
. Drugi par sila imat
ć
e
istu rezultantu, samo suprotnog smjera. Sada se rezultanta
K
G
rastavlja
na poznate pravce drugog para sila
C
F
G
,
D
F
G
.
U presjeku ova dva pravca
dobiva se ta
č
ka d. Njome su odre
đ
eni intenziteti sila
.
C
F
G
,
D
F
G
. Sada je
ležaj u ravnoteži i sile (
F
G
,
B
F
G
,
C
F
G
,
D
F
G
)
č
ine zatvoren poligon.
Slika 4.58 Plan sila
120
STATIKA
Primjer 4.15
Ljestve težine
G
= 300 N optere
ć
ene su u ta
č
ki C
vertikalnom silom
F
= 500 N prema slici 4.59. Zid i pod su savršeno
glatki i klizanje ljestvi sprije
č
eno je užetom DE. Grafi
č
ki i analiti
č
ki
odrediti reakcije u A i B i silu
S
u užetu.
Slika 4.59 Ljestve
Rješenje:
a) Analiti
č
ko rješenje
Prvo se uklone veze ljestvi sa okolinom. Njihov uticaj zamjeni se
odgovoraju
ć
im reakcijama, što je prikazano plan-položajem na slici
4.50a
Slika 4.50a Ljestve oslobo
đ
ene
veza
Slika 4.50b Plan sila

122
STATIKA
Primjer 4.16
Pravougaona plo
č
a težine
G
=320 N poduprta je sa 3 štapa
kako je prikazano na slici 4.51. Plo
č
a je izložena dejstvu sprega
M
=320
Nm. Odrediti sile u štapovima grafi
č
kim i analiti
č
kim putem. Zadani su
uglovi
α
=60
°
i
β
=60
°
.
Slika 4.51 Pravougaona plo
č
a
Rješenje:
a) Analiti
č
ko rješenje
Plo
č
a je oslobo
đ
ena veza. Uticaj veza zamijenjen je reakcijama veza što
je prikazano planom položaja na slici 4.52. Uslovi ravnoteže daju
sljede
ć
e izraze:
α
β
=
⋅
+
⋅
−
=
∑
1
2
3
0
cos
cos
0
X
S
S
S
.........................................(a)
1
2
0
sin
sin
0
Y
S
S
G
α
β
=
⋅
−
⋅
−
=
∑
...........................................(b)
3
0
2,5
2 0
A
M
G
S
=
⋅
−
⋅ =
∑
.........................................................(c)
Izraz (c) daje vrijednost sile S
3
:
3
2,5
400 N
2
G
S
⋅
=
=
Uvrštavanjem vrijednosti za uglove, izrazi (a) i (b) postaju:
1
2
3
1
2
cos 60
cos 60
/ : cos 60
sin60
sin60
/ : sin60
S
S
S
S
S
G
⋅
° +
⋅
° =
°
⋅
° −
⋅
° =
°
1
2
1
2
800
370
S
S
S
S
+
=
−
=
Sabiranjem prethodna dva izraza dobiva se vrijednost sile S
1
:
1
2
1170
S
⋅
=
123
4-RAVANSKI SISTEM SILA
1
585 N
S
=
Sila S
2
je:
2
1
2
800
215 N
S
S
S
=
−
=
=
=
=
=
320
1 m
32
100 N
1cm
F
M
a
G
U
a) plan položaja b) plan sila
Slika 4.52 Plo
č
a oslobo
đ
ena veza
b) Grafi
č
ko rješenje
Moment sprega koji djeluje na plo
č
u rastavi
ć
emo na spreg sila koje
djeluju na kraku
a
= 1 m i staviti u položaj kao na slici. Vektori
G
G
i '
G
G
su suprotni pa
ć
e se poništiti. Od aktivnog optere
ć
enja tada osaje da
djeluje samo sila '
G
G
intenziteta G, izmaknuta za rastojanje
a
= 1 m u
odnosu na težište plo
č
e (slika 4.52a).
Silu '
G
G
potrebno je rastaviti na tri sile
č
iji su pravci poznati. Ta
č
ka L je
prva ta
č
ka Kulmanove linije. Dobivena je presjekom pravca sile '
G
G
i sile
3
S
G
. Druga ta
č
ka Kulmanove linije je ta
č
ka A. Ona je dobivena
presjekom pravaca drugog para sila,
1
S
G
i
2
S
G
. Oba para sila moraju
imati rezultante koje leže duž Kulmanove linije. Te dvije rezultante bi
ć
e
istog intenziteta, a suprotnog smjera. Njihovo djelovanje
ć
e se
poništavati i tijelo
ć
e ostati u ravnoteži.

125
4-RAVANSKI SISTEM SILA
Rješavanjem sistema jedna
č
ina (b) i (c) dobivaju se nepoznate
vrijednosti sila
B
F
G
i
F
G
. Potom se iz jedna
č
ine (a) dobiva vrijednost sile
A
F
G
.
65,6N
210,6N
106,314N
A
B
F
F
F
=
=
=
=
=
1kN
2cm
10 cm
1cm
F
L
U
U
a) Plan položaja grede AB
b) Plan sila
Slika 4.54 Grafi
č
ko rješenje zadatka 4.17
b) Grafi
č
ko rješenje
Pod djelovanjem svih aktivnih sila i reakcija veza, štap mora biti u
položaju ravnoteže. Poznate sile
G
G
i
S
G
treba svesti na njihovu
rezultantu
R
G
č
iji pravac prolazi kroz presje
č
nu ta
č
ku sila
G
G
i
S
G
.
Dobivenu rezultantu pomo
ć
u Kulmanove linije treba razložiti na sile
(
A
F
G
,
B
F
G
i
F
G
)
č
iji su pravci poznati. Prvo se odredi presje
č
na ta
č
ka M
pravca
R
G
i
A
F
G
, a zatim presje
č
na ta
č
ka N pravaca preostale dvije
nepoznate sile
B
F
G
i
F
G
. Kroz ta
č
ke M i N povu
č
e se Kulmanova linija, a
zatim rezultanta rastavi prvo na
K
G
i
A
F
G
, a nakon toga se
K
G
rastavi na
B
F
G
i
F
G
.
126
STATIKA
Primjer 4.18
Homogena greda dužine 2
l
i težine
G
=100 N oslanja se
jednim krajem na glatku horizontalnu podlogu, a drugim na glatku
ravan nagnutu pod
α
=30
°
. Kraj B je vezan užetom koje je preba
č
eno
preko kotura u ta
č
ki C, a nosi teret
Q
. Dio užeta paralelan je sa
kosinom. Izra
č
unati veli
č
inu tereta
Q
i reakcije u A i B, za slu
č
aj
ravnoteže. Dobivenu vrijednost rezultate potrebno je provjeriti grafi
č
ki.
Slika 4.55 Homogena greda
Rješenje
a) Analiti
č
ko rješenje
Uklone se veze, zamijene reakcijama veza i nanesu aktivne sile (slika
4.56).
a) Plan položaja
b) Plan sila
Slika 4.56 Greda u ravnotežnom položaju pod djelovanjem aktivnih
sila i reakcija veza

128
STATIKA
Primjer 4.19
Štap AB, pokretne dizalice, dužine
l
=6m, u
č
vrš
ć
en je
zglobno u pokretnom osloncu A, a vo
đ
en štapom EC. Veze u E i C su
zglobne. Za ta
č
ku D privezano je uže koje je preba
č
eno preko kotura K i
zategnuto silom
F
G
. U ta
č
ki B djeluje teret
G
težine 3 kN.
Grafi
č
ki i analiti
č
ki odrediti veli
č
inu sile
F
G
, reakciju u osloncu A i silu u
štapu EC.
Slika 4.57 Štap AB dizalice
Rješenje
Analiti
č
ko rješenje
Štap AB dizalice se oslobodi veza koje se zamijene reakcijama i nanesu
se aktivne sile
F
G
i
G
G
. Uslovi ravnoteže štapa AB pokretne dizalice, u
ravni, su:
0
cos 45
cos 30
0
A
CE
X
F
F
F
=
−
° −
° =
∑
...................................(a)
0
sin 45
sin30
0
CE
Y
F
F
G
=
° +
° −
=
∑
.....................................(b)
0
5 sin 45
3
1 cos 45
0
D
A
CE
M
F
F
G
=
⋅ ⋅
° −
⋅ − ⋅ ⋅
° =
∑
.....................(c)
Uslovi ravnoteže daju sistem od tri jedna
č
ine sa tri nepoznate:
2
3
0
2
2
A
CE
F
F
F
−
−
=
.....................................................................(a')
2
1
3 0
2
2
CE
F
F
+
− =
.........................................................................(b')
129
4-RAVANSKI SISTEM SILA
2
2
5
3 6 1
0
2
2
A
CE
F
F
⋅ ⋅
−
⋅ − ⋅ ⋅
=
....................................................... (c')
Iz jedna
č
ine (b’) dobiva se izraz za silu
F
G
:
F
= 6 -1,41
⋅
F
CE
................................................................................ (b'')
Ova smjena se uvrsti u jedna
č
inu (a'). Rješavanjem sistema jedna
č
ina
(a') i (b') dobiva se vrijednost intenziteta reakcija:
F
CE
= 3,37 kN i
F
A
= 3,45 kN.
Vrijednost intenziteta sile
F
G
, iz izraza (b'') je:
F=1,25 kN.
Slika 4.58 Štap AB oslobo
đ
en veza

131
4-RAVANSKI SISTEM SILA
Uslovi ravnoteže plo
č
e u ravni bi bili:
1
2
3
0
cos 60
cos 60
cos 60
0
X
S
S
S
F
=
−
° +
−
° −
° =
∑
................. (a)
1
3
0
sin60
sin60
sin60
0
Y
S
S
F
G
=
−
° +
° +
° −
=
∑
.................... (b)
=
⋅ ⋅
° + ⋅
=
∑
2
0
sin 60
0
2
C
a
M
S
a
F
............................................ (c)
Iz jedna
č
ine (c) dobiva se vrijednost sile
2
S
G
:
2
578N
2
sin60
F
S
a
−
=
= −
⋅
°
Pretpostavljeno je da je štap 2 optere
ć
en na istezanje. Pošto je dobivena
negativna vrijednost, štap je napregnut na pritisak.
Iz jedan
č
ina (a) i (b) dobiju se vrijednosti sila
1
S
G
i
3
S
G
:
1
3
1
3
1
1
1
578
1000
0
2
2
2
3
3
3
1000
500 0
2
2
2
S
S
S
S
−
+
−
−
=
−
+
+
−
=
+
S
3
= - 1288,9 N i
S
1
= - 867,1 N
Štapovi 1 i 3 su pritisnuti.
b) Grafi
č
ko rješenje
Korištena je Kulmanova metoda. Na
đ
ena je rezultanta
R
G
aktivnih sila
G
G
i
F
G
. Njen pravac mora prolaziti kroz presje
č
nu ta
č
ku pravaca sila
G
G
i
F
G
u planu položaja. Rezutanta
R
G
i sila
2
S
G
daju u presjeku svojih
pravaca prvu ta
č
ku Kulmanove linije, ta
č
ku M. Drugi par sila
1
S
G
i
3
S
G
daju drugu ta
č
ku Kulmanove linije, ta
č
ku C. Prvo se sila
R
G
rastavlja na
dva poznata pravca: Kulmanova sila
K
G
i sila
2
S
G
, a zatim se Kulmanova
sila
K
G
rastavlja na pravce sila
1
S
G
i
3
S
G
.
132
STATIKA
Primjer 4.21
Na glatkim kosim ravninama koje zatvaraju uglove
α
i
β
klize 2 tereta
Q
1
i
Q
2
koji su me
đ
usobno spojeni nerastegljivim užetom.
Pri kojem uglu
ψ
je sistem u ravnoteži, kolika je napetost užeta
S
i
kolika je veli
č
ina reakcije na strmim ravninama. Zadano je
α
=30
°
,
β
=60
°
, 2
Q
1
=
Q
2
=100 N.
Slika 4.61 Tereti
Q
1
i
Q
2
Rješenje
Analiti
č
ko rješenje
Ako se posmatra ravnoteža sistema i traže samo spoljašnje reakcije
onda sistem nije potrebno rastavljati. Dovoljno je osloboditi ga
spoljašnjih veza, pa iste zamijeniti spoljašnjim reakcijama.
Ako treba odrediti i unutrašnje reakcije onda sistem treba rastaviti, a
veze, spoljašnje i unutrašnje, zamijeniti odgovaraju
ć
im reakcijama i za
svaki element sistema postaviti adakvatne uslove ravnoteže.
Posmatra
ć
e se ravnoteža tereta B.
Slika 4.62 Teret B na koji djeluje aktivna sila
težine i reakcije veza
2

134
STATIKA
1
50
2
tg
0,289
3
100
2
16,12
ψ
ψ
=
=
=
°
Iz izraza (c') dobiva se vrijednost sile u užetu
S
G
:
1
sin
90N
sin
S Q
α
ψ
=
=
Reakcije strmih ravni, iz izraza (b) i (d), su:
B
2
1
sin
cos
75N
cos
cos
129,76N
A
N
S
Q
N
S
Q
ψ
β
ψ
α
=
+
=
=
+
=
Primjer 4.22
Dvije homogene kugle, jednakih težina
G
i polupre
č
nika
R
, vezane su koncima za nepokretne zglobove A i B i oslanjaju se jedna
na drugu, a prva i na glatki pod. Odrediti sile u koncima, pritisak na
pod i uzajamni pritisak kugli ako je u ravnotežnom položaju poznat
ugao
α
i ako je BC
1
=BC
2
=
l
. Zadano je
G
=10 kN i
α
=60
°
.
Slika 4.64 Dvije kugle
Da bi se odredio uzajamni pritisak kugli, kugle
ć
e se rastaviti i
posmatrati ravnoteža svake kugle posebno. Uzajamni pritisak kugli
predstavit
ć
e se reakcijom
N
G
. Reakcija
N
G
ima pravac okomit na
tangentu, povu
č
enu u dodirnoj ta
č
ki kugli, tj prolazi pravcem koji
povezuje centre kugli
1 2
C C
. Potrebni uglovi odre
đ
eni su analizon slike
4.65b.
135
4-RAVANSKI SISTEM SILA
Posmatrat
ć
e se ravnoteža kugle II, koja je predstavljena na slici 4.65a.
Uslovi ravnoteže su
č
eljnog sistema sila koje djeluju na kuglu II su:
0
cos 30
cos 30
0
B
X
S
N
=
−
° +
° =
∑
............................................... (a)
0
sin30
sin30
0
B
Y
S
N
G
=
° +
° −
=
∑
............................................. (b)
Iz jedna
č
ine (a) slijedi da je
S
B
=
N
...................................................... (a’)
Ako se (a') uvrsti u (b) dobit
ć
e se:
2
N
⋅
sin30
°
-
G
=0
N
=
G
.................................................................................................. (c)
Slijedi da reakcije
i
B
S
N
G
G
imaju vrijednosti:
S
B
=10 kN i
N
= 10 kN.
Slika 4.65a Kugle I i II me
đ
usobno rastavljene
Slika 4.65b Geometrija zadana uslovima zadatka
Posmatrat
ć
e se ravnoteža kugle I (slika 4.56a). Uslovi ravnoteže
su
č
eljnog sistema sila koje djeluju na kuglu I su:
0
cos 30
cos 30
0
A
X
S
N
=
° −
° =
∑
................................................. (d)
0
sin30
sin30
0
D
A
Y
N
G S
N
=
−
−
° −
° =
∑
...................................... (e)
II
I

137
4-RAVANSKI SISTEM SILA
Rješavanjem sistema jedna
č
ina (a') i (b') dobivaju se vrijednosti reakcija
1
N
G
i
2
N
G
:
N
1
=20 kN
N
2
=20 3 kN
Slika 4.67 Odre
đ
ivanje reakcija
1
N
G
i
2
N
G
Da bi se odredio ravnotežni ugao
ϕ
i unutrašnja reakcija
N
G
posmatra
se ravnoteža jednog elemanta sistema npr. kugle C
1
(slika 4.68).
Slika 4.68 Ravnoteža kugle C
1
1
0
sin
cos
0
X
N
N
α
ϕ
=
−
=
∑
........................................................ (c)
1
1
0
cos
sin
0
Y
N
N
G
α
ϕ
=
+
−
=
∑
.................................................. (d)
cos
10 3
N
ϕ
=
................................................................................. (c’)
1
sin
10 20
0
2
N
ϕ
=
−
=
....................................................................... (d’)
Dijeljenjem jedna
č
ine (d’) sa (c’)dobiva se vrijednost ugla
ϕ
:
ϕ
ϕ
=
⇒
=
0
0
tg
138
STATIKA
Iz jedan
č
ine (c’) dobiva se vrijednost unutrašnje rakcije kugli
N
G
:
N
=10 3 kN
Primjer 4.24
Homogena greda AB dužine 2
l
i težine 2
G
, u B je
optere
ć
ena silom
F
i krajem A zglobno je vezana za nepokretni oslonac.
U ta
č
ki C, sredina grede AB, slobodno se oslanja na horizonatalnu
konzolu CD, dužine
l
i težine
G
, koja je krajem D uklještena u vertikalni
zid.
Grafi
č
ki i analiti
č
ki odrediti veli
č
ine reakcija u osloncu A, ta
č
ki C i
uklještenju D. Dimenzije prema slici:
l
=40 cm,
G
=300 N,
F
=400 N.
Slika 4.69 Sistem grede i konzole
Slika 4.70 Sistem rastavljen na gredu i konzolu

140
STATIKA
b) Grafi
č
ko rješenje
Pri grafi
č
kom odre
đ
ivanju nepoznatih reakcija oslonaca, kre
ć
e se od
grede AB. Aktivne sile
F
G
i 2
G
G
zamijene se svojom rezultantom
R
G
,
č
iji
pravac prolazi kroz presje
č
nu ta
č
ku njihovih pravaca. Dalje se primijeni
teorema o tri sile u ravni: da bi tijelo pod dejstvom tri sile bilo u
ravnoteži, pravci sve tri sile moraju prolaziti kroz istu ta
č
ku. Odredi se
presjek pravaca sila
R
G
i
C
F
G
i kroz tu presje
č
nu ta
č
ku mora prolaziti
pravac sile
A
F
G
. Zatim se u planu sila, sila
R
G
rastavi na pravce
C
F
G
i
A
F
G
.
Kod konzole pozante su dvije sile
G
G
i
C
F
G
'. Sila
D
F
G
mora zatvarati trokut
sila kako bi glavni vektor sila konzole bio jednak nuli.
Primjer 4.25
Preko kotura I koji se može okretati oko O preba
č
eno je
uže i na njemu su obješena dva jednaka tereta
F
. Kotur II težine
G
pri
č
vrš
ć
en je zglobno na O pomo
ć
u štapa OA (bez težine) dužine
l
=10cm, te djeluje na lijevi kraj užeta i otklanja ga od vertikalne ose
prema slici.
Odrediti analiti
č
ki ugao
α
koji štap zatvara sa vertikalom i silu u štapu
OA.
Zadato je:
F
=100 N,
G
=40 N,
r
=3 cm,
R
=4 cm,
l
=10 cm.
Slika 4.71 Sistem kotura I i II
141
4-RAVANSKI SISTEM SILA
Rješenje
Analiti
č
ko rješenje
Prvo
ć
e se postaviti momentna jedana
č
ina za zglob O uzimaju
ć
i u obzir
cijeli sistem (slika 4.72).
Ravnoteža sistema:
α
α
=
+
− −
=
∑
0
sin
( sin
)
0
O
M
Gl
F l
r
FR
........................................ (a)
α
α
+
−
−
=
sin
sin
0
Gl
Fl
Fr FR
α
+
−
+
=
sin (
)
(
) 0
l
G F
F r R
................................................................. (a')
Iz jedan
č
ine (a') dobivamo izraz za ugao otklona štapa OA prema
vertikali
α
α
α
α
+
=
+
+
=
=
+
=
°
(
)
sin
(
)
100(4 3)
sin
0,5
10(40 100)
30
F r R
l G F
Slika 4.72 Ravnoteža sistema kotura I i II

143
4-RAVANSKI SISTEM SILA
Slika 4.74 Tri cilindra
Slika 4.75 Aktivne sile koje
djeluju na sistem
Da bi se našla sila u užetu i uzajamni pritisak cilindara, sistem od tri
cilindra
ć
e se rastaviti na svaki pojedina
č
no i posmatrat
ć
e se ravnoteža
cilindara 1 i 2.
Slika 4.76 prikazuje cilindar 1 u ravnotežnom položaju. Na njega djeluje
aktivna sila težine
Q
G
i reaktivne sile pritisaka
A
F
G
i
B
F
G
cilindara 2 i 3
(slika 4.75).
Slika 4.76 Ravnoteža cilindra 1
Uslovi ravnoteže su:
0
sin
sin
0
A
B
X
F
F
α
α
=
−
=
∑
....................................................... (a)
0
cos
cos
0
A
B
Y
F
F
Q
α
α
=
+
−
=
∑
................................................. (b)
Iz jedna
č
ine (a) slijedi da je
F
A
=
F
B
pa jedna
č
ina (b) dobiva oblik:
2
F
A
cos
α
-
Q
= 0 ................................................................................. (c)
Iz trougla O
1
O
2
O
3
(slika 4.75) vidi se da je:
2 3
O O
=2
r
=2(
R+r
)sin
α
......................................................................... (d)
144
STATIKA
sin
r
r R
α
=
+
..................................................................................... (d')
2
2
2
2
2
cos
1 sin
1
(
)
r
R
Rr
R r
r R
α
α
+
=
−
=
−
=
+
+
................................... (d'')
Uvrštavanjem izraza (d'') u jedna
č
inu (c) dobije se:
(
)
(
)
2
2
i
2
2
2
2
A
B
Q R r
Q R r
F
F
R
Rr
R
Rr
+
+
=
=
+
+
Uslovi ravnoteže su
č
eljnog sistema sila cilindra 2 (slika 4.77) su:
Slika 4.77 Ravnoteža cilindra 2
0
sin
0
A
X
S F
α
=
−
=
∑
................................................................. (e)
0
cos
0
A
Y
N G F
α
=
−
−
=
∑
.......................................................... (f)
Iz jedna
č
ine (e) može se izra
č
unati sila u užetu
S
G
:
(
)
(
)
2
2
sin
2
2
2
2
A
Q R r
r
S
F
R r
R
Rr
Q r
S
R
Rr
α
+
=
=
+
+
⋅
=
+
Iz jedna
č
ine (f) može se odrediti reakcija podloge
N
G
:
(
)
2
2
2
cos
2
2
2
A
Q R r
R
Rr
N
G F
G
R r
R
Rr
Q
N
G
α
+
+
=
+
=
+
⋅
+
+
=
+

146
STATIKA
Uslovi ravnoteže su
č
eljnog sistema sila valjka su:
0
sin
0
D
C
X
F
F
α
=
−
=
∑
............................................................... (a)
0
cos
0
C
Y
F
Q
α
=
−
=
∑
................................................................ (b)
Iz jedan
č
ina (b) i (a) dobivamo vrijednosti nepoznatih reakcija
C
F
G
i
D
F
G
:
500
1000N
cos
0,5
C
Q
F
α
=
=
=
3
sin
1000
865N
2
D
C
F
F
α
=
=
=
Sada
ć
e se posmatrati ravnoteža grede AB, koja je prikazana na slici
4.80.
Slika 4.80 Ravnoteža grede AB
Uslovi ravnoteže ravanskog sistema sila grede AB su:
0
sin
0
C
BX
X
F
F
α
=
−
=
∑
............................................................. (c)
0
cos
0
A
BY
C
Y
F
G F
F
α
=
−
−
−
=
∑
................................................. (d)
0
cos
cos
0
2
B
A
C
l
M
F l
F BC G
α
α
=
−
+
+
=
∑
.................................... (e)
147
4-RAVANSKI SISTEM SILA
Na osnovu slike 4.78 može se izra
č
unati dužina grede AB=
l.
60 15
AB
90cm
cos
cos 60
b r
l
α
−
−
= =
=
=
°
. Dužine AC i BC su:
AC
tg
15
3 cm BC
64cm
r
l AC
α
= ⋅
=
⋅
= −
≈
Iz jedna
č
ine (c) slijedi:
sin
BX
C
F
F
α
=
................................................................................... (c')
3
1000
865N
2
BX
F
=
=
Iz jedna
č
ine (e) slijedi:
cos
2
cos
C
A
l
F
BC G
F
l
α
α
⋅
+
⋅
=
.................................................................. (e')
1000 64 300 45 0,5
1572,2N
90 0,5
A
F
⋅
+
⋅
⋅
=
=
⋅
Iz jedana
č
ine (d) slijedi:
cos
BY
A
C
F
F
G G
α
=
−
−
..................................................................... (d')
1572,2 300 1000 0,5 772,2N
BY
F
=
−
−
⋅
=
Intenzitet reakcija
B
F
G
je:
2
2
1159N
B
BX
BY
F
F
F
=
+
=
b) Grafi
č
ko rješenje
Nepozante sile koje djeluju na valjak
C
F
G
i
D
F
G
, odrede se tako da se sila
težine
Q
G
rastavi na poznate pravce sila
C
F
G
i
D
F
G
, što je prikazano na slici
4.79.
Kod odre
đ
ivanja reakcija na gredi AB, primjenit
ć
e se teorema o tri sile.
Poznate sile
C
F
G
i
G
G
zamijene se rezultantom
R
G
. Njen pravac prolazi
kroz presje
č
nu ta
č
ku pravaca sila
C
F
G
i
G
G
. Sada se na
đ
e presje
č
na
ta
č
ka sile
R
G
i poznatog pravca reakcije
A
F
G
. Kroz tu ta
č
ku mora prolaziti
i reakcija zgloba B:
B
F
G
. Kada je odre
đ
en pravac sile
B
F
G
, sila
R
G
se
rastavi na pozante pravce sila
A
F
G
i
B
F
G
.

149
5-RAVNI NOSA
Č
I
1
1
1
0;
0;
0
n
n
n
xi
yi
oi
i
i
i
F
F
M
=
=
=
=
=
=
∑
∑
∑
........................................ (5.1)
odre
đ
ivanje ovih reakcija ne predstavlja problem.
Naj
č
eš
ć
e korištena podjela ravnih nosa
č
a je prema obliku, slika 5.2.
Tako imamo:
-
prosti nosa
č
(greda), slika 5.2a,
-
nosa
č
(greda) sa prepustom, slika 5.2b,
-
Gerberov nosa
č
(greda), slika 5.2c,
-
okvirni nosa
č
(ram), slika 5.2d.
Slika 5.2 Šematski prikaz prostog nosa
č
a, nosa
č
a sa prepustom,
Gerberovov i okvirnog nosa
č
a
Prikazani nosa
č
i na slici 5.2 izloženi su dejstvu ne samo koncentrisanog
optere
ć
enja ve
ć
i dejstvu kontinualnog optere
ć
enja ili takozvanog
specifi
č
nog optere
ć
enja
q
.
Ovo optere
ć
enje je u suštini promjenljivo i zavisi od apscise
q
= f(
x
), za
usvojeni Dekartov koordinatni sistem 0
xy
, a njegova jedinica mjere je
[
Nm
-1
]
.
150
STATIKA
5.2 Grafi
č
ki postupak odre
đ
ivanja reakcija
oslonaca nosa
č
a
Na primjeru sa slike 5.3, bi
ć
e izložen grafi
č
ki postupak odre
đ
ivanja
reakcija u osloncima.
Slika. 5.3 Grafi
č
ki postupak odre
đ
ivanja reakcija u osloncima nosa
č
a
Neka je dati nosa
č
optere
ć
en koncentrisanim silama
1
2
3
, , .
F F F
G G G
Za ovaj
sistem sila potrebno je formirati poligon sila, a time je definisana i
njegova rezultanta. Obzirom da su sve napadne sile vertikalne to su i
reakcije u osloncima vertikalne. Prema tome ovaj zadatak se svodi na
razlaganje rezultante
R
F
G
i sila
1
2
3
,
i
F F
F
G G
G
na dvije komponente koje su
paralelne samoj rezultanti, a prolaze kroz ta
č
ke (oslonce)
A
i
B
.
Da bi ovo uradili potebno je konstruisati verižni poligon sa polnim
zrakama 1-2-3-4. Produženi polni zraci 1 i 4 presjecaju napadne linije
reakcija
A
F
G
i
B
F
G
u ta
č
kama I i II, koje definišu zaklju
č
nicu "S".
Paralelnim prenošenjem zaklju
č
nice "S" kroz pol "
P
", dobi
ć
emo
presje
č
nu ta
č
ku "
e
" na planu sila, a tim su odre
đ
ene i reakcije oslonaca
A
F
G
i
B
F
G
. Intezitet ovih reakcija je:
A
F
F
ae U
=
⋅
................................................................................... (5.2)
B
F
F
de U
=
⋅
................................................................................... (5.3)
1
cm
F
F
U
N
L
−
⎡
⎤
=
⎣
⎦

152
STATIKA
Ako bi na datom nosa
č
u napraviti proizvoljan presjek p-p u tom slu
č
aju
lijeva strana nosa
č
a djelovat
ć
e na desnu stranu nosa
č
a upravo onom
silom i momentom sa kojim desna strana nosa
č
a djeluje na lijevu
stranu, slika 5.5.
Slika 5.5. Nosa
č
optere
ć
en aksijalnom i transverzalnom silom i
momentom savijanja
Neka je nosa
č
sa slike 5.5 podijeljen presjekom p-p na dijelove I i II. Dio
nosa
č
a I djeluje na dio nosa
č
a II silom i momentom istog intenziteta, a
suprotnog smjera kojim dio nosa
č
a II djeluje na dio nosa
č
a I.
Na slici 5.5a i 5.5b prikazan je uticaj jednog dijela nosa
č
a na drugi. Da
bi potpuno definisali optere
ć
enje nosa
č
a u presjeku p-p uvedeni su
slijede
ć
i pojmovi:
-
vertikalna komponenta sile (transverzalna sila),
-
horizontalna komponenta sile (aksijalna sila),
-
glavni moment (napadni moment).
Transverzalna sila u nekom popre
č
nom presjeku nosa
č
a jednaka je
algebarskom zbiru vertikalnih projekcija svih sila koje djeluju na nosa
č
lijevo ili desno od nazna
č
enog presjeka. Sa obje strane presjeka
transverzalne sile su istog intenziteta, a suprotnog smjera.
Aksijalna sila u nazna
č
enom presjeku jednaka je algebarskom zbiru
svih horizontalnih projekcija dejstvuju
ć
ih sila lijevo ili desno od tog
presjeka.
153
5-RAVNI NOSA
Č
I
Napadni moment u nazna
č
enom presjeku nosa
č
a jednak je
algebarskom zbiru momenata svih sila lijevo ili desno od tog presjeka.
Na slici 5.6 prikazani su grafi
č
ki stati
č
ki dijagrami, odnosno dijagram
promjene transverzalne sile (
F
T
), momenta savijanja (
M
) i aksijalne sile
(
F
a
).
Slika 5.6 Grafi
č
ki prikaz stati
č
kih dijagrama

155
5-RAVNI NOSA
Č
I
Slika 5.7 Prosta greda optere
ć
ena konstantnim kontinualnim
optere
ć
enjem
5.4.2 Prosta greda optere
ć
ena trougaonim
kontiualnim optere
ć
enjem
Transverzalna sila i moment savijanja lijevo od presjeka p-p u ovom
slu
č
aju definisani su izrazima:
2
l
x
T
A
q
x
F
F
⋅
=
−
............................................................................. (5.13)
1
1
2
3
l
x
A
x
M
F x
q x x
=
−
.................................................................... (5.14)
Kontinualno optere
ć
enje u ovom slu
č
aju možemo zamijeniti
koncentrisanom silom
Q
č
iji je intezitet:
1
2
o
Q
q l
=
⋅
.................................................................................... (5.15)
Kontinualno optere
ć
enje
q
x
u bilo kojem presjeku grede je:
x
o
x
q
q
l
=
...................................................................................... (5.16)
156
STATIKA
Slika 5.8 Prosta greda optere
ć
ena trougaonim kontinualnim optere
ć
enjem
Iz uslova ravntoeže
1
1
0 i
0
i
n
n
F
yi
A
i
i
F
M
=
=
=
=
∑
∑
G
mogu se odrediti reakcije
i
A
B
F
F
G
G
1
6
A
o
F
q l
=
..................................................................................... (5.17)
1
3
B
o
F
q l
=
..................................................................................... (5.18)
5.4.3 Prosta greda optere
ć
ena vertikalnom
ekscentri
č
nom silom
Iz jedna
č
ina ravnoteže
∑
F
xi
= 0 i
∑
M
i
= 0 mogu se odrediti reakcije:
M
= F
⋅
d, ........................................................................................ (5.19)
A
F b
F
a b
⋅ −
=
+
M
............................................................................... (5.20)

158
STATIKA
5.4.4
Konzola
Kod konzolnog nosa
č
a u uklještenju, kao reakcija, javlja se sila
A
F
G
i
moment uklještenja
M
A
.
Iz uslova ravnoteže proizlazi da je:
F
A
=
F
........................................................................................... (5.26)
M
A
=
F
⋅
l
....................................................................................... (5.27)
Transverzalna sila u bilo kojem presjeku je:
F
T
=
F
A
.......................................................................................... (5.28)
dok je napadni moment u presjeku x:
M
x
=
F
⋅
(
l
-
x
) ................................................................................... (5.29)
Slika. 5.10 Konzola optere
ć
ena koncentrisanom silom
Iz prethodnog izlaganja moglo se uo
č
iti da ako transverzalna sila u
nekom presjeku nosa
č
a, prolazi kroz nulti položaj i mijenja predznak,
onda napadni momenat u tom presjeku ima ekstremnu vrijednost.
159
5-RAVNI NOSA
Č
I
5.4.5 Prosta greda optere
ć
ena proizvoljnim
kontinuranim optere
ć
enjem
Na slici 5.11 prikazana je greda optere
ć
ena proizvoljnim kontinuiranim
optere
ć
enjem
q
.
U presje
č
nim ta
č
kama
C
i
D
djeluje glavni vektor i glavni moment koji
predstavljaju reakcije (uticaj) odba
č
enih dijelova nosa
č
a.
Sada za izdvojeni elementarni dio nosa
č
a uslovi ravnoteže imaju oblik:
(
)
=
=
−
−
+
=
∑
1
0
n
yi
Tx
x
Tx
Tx
i
F
F
q dx
F
d F
.............................................. (5.30)
(
)(
)
(
)
= −
+
+
+
+
⎛
⎞
+
+
+
−
+
=
⎜
⎟
⎝
⎠
∑
0
2
o
Tx
Tx
Tx
x
x
x
x
M
F x
F
dF
x dx
dx
M
q dx x
M
d M
.............................. (5.31)
Slika 5.11 Prosta greda optere
ć
ena proizvoljnim kontinualnim
optere
ć
enjem
Ako zanemarimo male veli
č
ine drugog i višeg reda iz prethodnih
jedna
č
ina slijedi da je:
-
q
x
dx
–
dF
T
x
= 0............................................................................. (5.32)
F
Tx
dx
-
dM
x
= 0 ............................................................................. (5.33)
Sada možemo napisati da je:
Tx
x
d F
q
dx
= −
.................................................................................... (5.34)

161
5-RAVNI NOSA
Č
I
5.4.7 Okvirni nosa
č
i
Okvirni nosa
č
(ram) je složeni nosa
č
sastavljen od više greda ili konzola,
koje su me
đ
usobno kruto ili zglobno vezane, tako da se ose greda,
odnosno konzola ne poklapaju, to jest nalaze se pod odre
đ
enim uglom.
Ako na okvirnom nosa
č
u postoji zglobna veza izme
đ
u nosa
č
a onda
kažemo da je to Gerberov okvirni nosa
č
(slika 5.2d)
Otpori oslonaca i stati
č
ki dijagrami definišu se kod okvirnog nosa
č
a isto
kao i kod ostalih nosa
č
a. Za uspješno crtanje stati
č
kih dijagrama
potrebno je pridržavati se usvojene konvencije o predznacima aksijalnih
i transverzalnih sila kao i momenta savijanja. Uz konvenciju o
predznacima tako
đ
er je vrlo bitno da prora
č
un okvirnog nosa
č
a
definišemo posmatraju
ć
i ga sa njegove unutrašnje strane.
U narednim primjerima prikazat
ć
emo osnovne karakteristike
prora
č
una okvirnih nosa
č
a.
162
STATIKA
l
= 2 m
Q
A
B
X
A
Y
A
F
B
Primjeri:
Zadatak 5.1
Za prikazane nosa
č
e (1-4) odredit reakcije oslonaca,
dijagrame aksijalnih, transferzalnih sila i dijagram momenta savijanja.
1. Nosa
č
5.12 Prosti nosa
č
optere
ć
en pravouglim
kontinuiranim optere
ć
enjem
a) Odre
đ
ivanje reakcija oslonaca
Uklone se oslonci A i B i njihov uticaj se zamijeni reakcijama.
Kontinuirano optere
ć
enje zamijeni se koncentrisanom silom koja djeluje
u centru pravougaone površine optere
ć
enja. Kod pravougaonika centar
je u presjeku dijagonala tj. na polovici dužine i polovici visine.
5.13 Kontinuirano optere
ć
enje zamijeni se
koncentrisanom silom
Optere
ć
enje
Q
jednako je veli
č
ini pravougaone površine:
Q= l
⋅
q =
2 m
⋅
4 kN/m = 8 kN
Stati
č
ki uslovi ravnoteže su:
0
0
A
X
X
=
=
∑
..........................................................................(a)
0
0
A
B
Y
Y
Q F
=
−
+
=
∑
...............................................................(b)
l
= 2 m
q
= 4 kN/m
A B

164
STATIKA
A
Y
A
P
F
a
M
F
T
z
Q
z
5.15 Sile i moment na lijevom dijelu grede
Iz jedan
č
ine (f) dobiva se vrijednost momenta savijanja:
2
4
4
2
4
2
2
A
z
z
z
M
Y z Q
z
z
z
z
=
−
=
−
⋅
= −
+
.........................................(f')
Iz jedan
č
ine (e) dobiva se vrijednost transferzalne sile:
4 4
T
A
z
F
Y
Q
z
=
−
= −
......................................................................(e')
Vrijednosti momenta savijanja mijenja se po kvadratnoj paraboli, dok se
vrijednost transferzalne sile mijenja linearno u zavisnosti od položaja
presjeka
z.
Vrijednosti unutrašnjih sila i momenta savijanja u presjecima grede
mogle su se dobiti poštuju
ć
i dogovor o pozitivnom smjeru ovih veli
č
ina
na lijevoj strani grede:
−
pozitivan doprinos aksijalnoj sili daju sve sile koje djeluju sa desna
na lijevo
+
←
−
pozitivan doprinos transferzalnoj sili daju sve sile koje djeluju naviše
+
↑
−
pozitivan doprinos momentu savijanja daju momenti svih sila za
presjek,
č
iji je smjer momenta jedanak smjeru kazaljke na satu
+
z
.
0
l
a
F
+
=
←
........................................................................................(i)
-
4
4
l
T
A
z
F
Y
Q
z
+↑
=
= −
+
...............................................................(j)
2
-
/2
2
4
l
A
z
M
Y z Q z
z
z
+
=
= −
+
z
....................................................(k)
Da bi se skicirali dijagrmi Fa, F
T
i M potrebno je na
ć
i njihove vrijednosti
u nekoliko presjeka grede. Pregledno je vrijednosti prikazati tabelarno.
165
5-RAVNI NOSA
Č
I
z (m)
Fa (kN)
F
T
(kN)
M (kNm)
0 0 4
0
1 0 0
2
2 0 -4 0
5.16 Dijagram transferzalnih sila i momenta savijanja
Izvod funkcije momenta savijanja M po koordinati
z
daje funkciju
transferzalne sile. Ovo pravilo važi za lijevi dio grede i može poslužiti za
provjeru ispravnosti postupka.
(
)
2
d
(
)
2
4
4
4
dz
l
l
T
d
M
z
z
z
F
dz
=
−
+
= −
+ =
........................................ (l)
l
= 2 m
q
= 4 kN/m
A B
Fa (kN)
F
T
(kN)
M (kNm)
-4
4
2
0
0
0 0
0 0
z
= 0 m
z
= 1 m
z
= 2 m

167
5-RAVNI NOSA
Č
I
desni dio konzole
B
P
F
T
M
F
a
z
Q
z
b) Odre
đ
ivnje aksijalne F
a
(uzdužne), transferzalne F
T
(popre
č
ne)
sile i momenta savijanja M
Konzola se presije
č
e na proizvoljnom mjestu i posmatra se ravnoteža
jednog dijela. U ovom primjeru posmatra
ć
e se ravnoteža desnog dijela.
U presjeku su nanesene unutrašnje sile i moment savijanja.
Predpostavljeno je da imaju pozitivne vrijednosti.
5.19 Ravnoteža desnog dijela konzole
Vrijednosti unutrašnjih sila i momenta savijanja mogu se dobiti
poštuju
ć
i dogovor o pozitivnom smjeru ovih veli
č
ina na desnoj strani
nosa
č
a:
−
pozitivan doprinos aksijalnoj sili daju sve sile koje djeluju sa lijeva
na desno
+
→
−
pozitivan doprinos transferzalnoj sili daju sve sile koje djeluju
naniže
+
↓
−
pozitivan doprinos momentu savijanja daju momenti svih sila za
presjek
č
iji je smjer momenta suprotan smjeru kazaljke na satu
+
{
.
0
d
a
F
+
=
→
....................................................................................... (e)
4
d
T
z
F
Q
z
+
=
=
↓
........................................................................... (f)
2
-
2
2
d
z
z
M
Q
z
+
=
= −
{
.................................................................... (g)
Da bi se skicirali dijagrmi Fa, F
T
i M potrebno je na
ć
i njihove vrijednosti
u nekoliko presjeka grede. Pregledno je vrijednosti prikazati tabelarno.
z (m)
Fa (kN)
F
T
(kN)
M (kNm)
0 0 0 0
1 0 4 -2
2 0 8 -8
168
STATIKA
5.20 Dijagram transferzalne sile i momenta savijanja
na konzoli
q
= 4 kN/m
l
= 2 m
A B
0 0
Fa (kN)
8
0
0
F
T
(kN)
M (kNm)
0 0
-8
-2
z
= 0 m
z
= 1 m
z
= 2 m

170
STATIKA
prvom polju
ć
e se presje
č
i greda i posmatrati ravnoteža lijevog dijela od
presjeka.
5.23 Unutrašnje sile u gredi ispod
kontinuiranog optere
ć
enja
Vrijednosti unutrašnjih sila i momenta savijanja dobiju se dobiti
poštuju
ć
i dogovor o pozitivnom smjeru ovih veli
č
ina na lijevoj strani
grede:
0
l
a
F
+
=
←
........................................................................................(e)
-
3
5
l
T
A
z
F
Y
Q
z
+↑
=
= −
+
...............................................................(f)
2
3
-
/2
5
2
l
A
z
M
Y z Q z
z
z
+
=
= −
+
z
..................................................(g)
Vrijednosti Fa, F
T
i M u polju:
z (m)
Fa
(kN)
F
T
(kN)
M
(kNm)
0 0 5 0
1 0 2
3,5
2 0 -1 4
U drugom polju, ako posmatramo sa desne strane imamo samo silu
F
B
koja djeluje naviše te daje negativan doprinos transferzalnoj sili u polju:
F
T
=-F
B
=-1 kN.
Moment savijanja u polju gdje nema kontinuiranog optere
ć
enja mijenja
se linearno pa je dovoljno da znamo vrijednosti momenta u dvije ta
č
ke.
U osloncu B moment je jednak nuli, a u presjeku C grede vrijednost
momenta je
M
C
=4 kN. Tu vrijednost smo izra
č
unali u prvom polju za
z
=2m.
U prvom polju transferzalna sila mijenja znak, pa je u tom presjeku
grede maksimalna vrijednost momenta savijanja u polju. Da bi se
odredio položaj presjeka, funkciju transferzalne sile potrebno je
izjedna
č
iti sa nulom:
F
T
A
Y
A
P
F
a
M
z
Q
z
171
5-RAVNI NOSA
Č
I
F
T
=-3
z
+5=0 slijedi da je
z
0
=5/3 m. Vrijednost momenta u tom presjeku
je:
2
0
5
3 5
5
1
5
4
4,167 kNm
3
2 3
3
6
M z
⎛
⎞
⎛ ⎞
=
= −
+
= +
=
⎜
⎟
⎜ ⎟
⎝
⎠
⎝ ⎠
5.24 Dijagram transferzalnih sila i momenata savijanja
4 m
q
= 3 kN/m
A B
2 m
C
Fa (kN)
F
T
(kN)
M (kNm)
-4
5
4
0
0
0 0
0 0
z
-1
-1
z
0
4,167

173
5-RAVNI NOSA
Č
I
F
T
A
Y
A
P
F
a
M
z
Q
z
b) Odre
đ
ivnje aksijalne F
a
(uzdužne), transferzalne F
T
(popre
č
ne)
sile i momenta savijanja M
Na gredi se mogu uo
č
iti tri polja. Prvo polje je dio grede pod
kontinuiranim optere
ć
enjem, drugo polje je dio CD i tre
ć
e polje je dio
DB.
U prvom polju
ć
e se presje
č
i greda i posmatrati ravnoteža lijevog dijela
od presjeka.
5.27 Vrijednost unutrašnjih sila i moment
ispod optere
ć
enja
Vrijednosti unutrašnjih sila i momenta savijanja dobiju se dobiti
poštuju
ć
i dogovor o pozitivnom smjeru ovih veli
č
ina na lijevoj strani
grede:
0
l
Fa
+
=
←
....................................................................................... (e)
-
2
4
l
T
A
z
F
Y
Q
z
+↑
=
= −
+
............................................................... (f)
+
=
= −
+
2
-
/2
4
l
A
z
M
Y z Q z
z
z
z
.................................................... (g)
2
z
Q
z
=
....................................................................................... (h)
Vrijednosti Fa, F
T
i M u polju:
z (m)
Fa
(kN)
F
T
(kN)
M
(kNm)
0 0 4 0
1 0 2 3
2 0 0 4
U 2. polju, transferzalna sila je konstantna je jednaka je:
4 4 0 kN
l
T
A
F
Y
Q
+ ↑
=
−
= − =
U 3. polju transferzalna sila je:
2 kN
d
T
B
F
F
+ ↓
= −
= −
Moment savijanja u 2 . i 3. polju mijenja se linearno pa je dovoljno da
znamo vrijednosti momenta u dvije ta
č
ke:
174
STATIKA
+
=
⋅ −
+
=
⋅ =
⋅ =
2
2 4 kNm
1 4kNm
l
C
A
d
D
B
M
Y
Q
F
M
z
{
Slika 5.28 Dijagram transferzalnih sila i momenta
savijanja
Fa (kN)
F
T
(kN)
M (kNm)
4
4
0
0
0 0
0 0
z
1 m
q
= 2 kN/m
A
B
2 m
C
2 m
D
F
= 2 kN
2
0
-2
3
176
STATIKA
Slika 5.30 Greda oslobo
đ
ena veza sa grafi
č
kim prikazom stati
č
kih
dijagrama dobijenih analiti
č
kim prora
č
unom
Iz jedna
č
ine (c) slijedi:
1
2
3
4
2
4
sin
6
2
5
q
B
F
F
F
F
F
a
F
α
−
−
−
+
+
=
M
.........................................(e)
177
5-RAVNI NOSA
Č
I
− − − + +
=
=
2 3 8 6 4 18
3,8 kN
5
B
F
a iz jedna
č
ina (a) i (b) slijedi:
X
A
=
F
3
cos
α
................................................................................. (a')
2
4 2
4 kN
2
A
X
=
=
Y
A
=
F
q
+
F
3
sin
α
+
F
4
–
F
1
–
F
2
-
F
B
............................................... (b')
2
6 4 2
3 2 4 3,8 3,2 kN
2
A
Y
= +
+ − − −
=
Intenzitet i pravac djelovanja reakcije u osloncu A definisan je izrazima:
2
2
,
A
A
A
F
x
y
=
+
.............................................................................. (f)
2
2
4
3,2
5,12 kN,
A
A
F
F
=
+
=
tg
,
A
A
Y
X
ϕ
=
..................................................................................... (g)
arc tg
A
A
Y
X
ϕ
=
................................................................................ (h)
0
0
3,2
arc tg
38,66
38 39'36"
4
ili
ϕ
ϕ
=
=
=
Kontrola:
∑
M
I
= 0
-
F
1
⋅
5
a
+
F
q
⋅
4,5
a
–
Y
A
⋅
4,5
a
–
F
2
⋅
2a +
M
+
F
B
⋅
a-F
4
⋅
2
a
................ (i)
-2
⋅
5
⋅
1 + 6
⋅
4,5
⋅
1 – 3,2
⋅
4,5
⋅
1 –8 + 6 + 3,8
⋅
1 – 3
⋅
2
⋅
1 = 0
- Dijagram momenta, aksijalnih i transverzalnih sila
Za crtanje dijagrama momenta (
M
x
), aksijalnih (
F
a
) i transverzalnih (
F
t
)
sila primijenit
ć
emo analizu po poljima i karakteristi
č
nim ta
č
kama.
Analizom dobijamo broj
č
ane vrijednosti momenta, aksijalnih i
transverzalnih sila na osnovu kojih konstruišemo dijagrame. Pod poljem
se podrazumijeva dio grede gdje transverzalne sile i momenti imaju
jedne (nepromjenljive) zavisnosti od položaja presjeka (koordinate x). U
ovom primjeru, analizu po poljima primijenit
ć
emo na dijelu grede sa
kontinualnim optere
ć
enjem, a na dijelu sa koncentrisanim silama
ra
č
unat
ć
emo
M
x
,
F
a
i
F
t
u karakteristi
č
nim ta
č
kama.

179
5-RAVNI NOSA
Č
I
x
(m)
F
a
(kN)
F
t
(kN)
M
x
(kNm)
0 4 1,2
-2
1 4
-0,8
-1,8
Polje III: 0
≤
x
≤
a
Slika 5.33 Polje III
1
2
2 1 2kN
q
q
F
F
q a
=
= ⋅ = ⋅ =
0
≤
x
≤
1 m
1
2
2 kN
q
q
F
F
=
=
l
a
A
F
x
+
=
←
+ ↑
= −
+
−
+
−
=
=
+
−
+
− ⋅
1
2
3
1
2
1
1
l
t
q
q
A
q
q
q
A
F
F
F
F
Y
F
F
F
F
Y
q x
+
= −
⋅
+
+
⋅
+
−
+
+
⋅ −
⋅
=
= −
+
+
+
−
+
+
⋅ −
1
2
3
1
2
1
2
1
(1,5
)
(
)
( ,5
)
0,5
(1,5
)
(
)
(0,5
)
0,5
l
x
q
q
A
q
q
q
A
M
F
a x
F
a x
F o a x
Y
x F
x
F
a x
F a x
F
a x
Y
x
q x
z
Vrijednosti
,
a
t
F F i M
G G
G
za neke vrijednosti x u okviru analize po poljima
data su u tabelama.
Za dio grede od ta
č
ke
E
do ta
č
ke
K
izra
č
unavamo
,
a
t
F F i M
G G
G
za
karakteristi
č
ne ta
č
ke
K
,
B
,
I
,
M
,
L
,
E
.
ε
+
+
=
→
(
)
0
d
a K
F
ε
+
+
=
=
↓
4
(
)
3kN
d
t
K
F
F
( )
0
d
x K
M
+
=
{
ε
−
+
=
→
(
)
0
d
a B
F
ε
−
+
=
=
↓
4
(
)
3kN
d
t
B
F
F
180
STATIKA
+
= −
⋅ = − ⋅ = −
4
( )
3 1
3kN
d
x B
M
F a
{
(
)
0
d
a B
F
ε
+
+
=
→
(
)
4
3 3,8
0,8 kN
d
t
B
B
F
F
F
ε
+
+
=
−
= −
= −
↓
(
)
0
d
a I
F
ε
−
+
=
→
(
)
4
3 3,8
0,8 kN
d
t
I
B
F
F
F
ε
−
+
=
−
= −
= −
↓
+
= −
⋅
+
⋅ = − ⋅ +
⋅ = −
4
( )
2
3 2 3,8 1
2,2kN m
d
x
B
I
M
F
a F
a
{
(
)
3
2
cos
4 2
4kN
2
d
a I
F
F
ε
α
+
+
=
=
=
→
(
)
4
3
2
cos
3 3,8 4 2
3,2kN
2
d
t
I
B
F
F
F
F
ε
α
+
+
=
−
+
= −
+
=
↓
ε
α
−
+
=
=
=
→
3
(
)
2
cos
4 2
4kN
2
d
a H
F
F
ε
α
+
+ ↓
=
−
+
= −
+
=
4
3
(
)
2
sin
3 3,8 4 2
3,2kN
2
d
t
B
H
F
F
F
F
ε
α
−
+
=
⋅
+
⋅
−
⋅ =
= − ⋅ +
⋅ −
⋅ = −
4
3
(
)
3
2
(
sin )
2
3 3 3,8 2 4 2
1
5,4kN m
2
d
x
B
H
M
F
a F
a
F
a
{
ε
ε
+
−
+
=
+
= −
+ =
(
)
(
)
5,4 6 0,6kN m
d
d
x
x
H
H
M
M
{
M
ε
α
−
+
=
=
=
→
3
(
)
2
cos
4 2
4kN
2
d
a L
F
F
ε
α
−
+ ↓
=
−
+
= −
+
=
4
3
(
)
2
sin
3 3,8 4 2
3,2kN
2
d
T
B
L
F
F
F
F
( )
4
3
4
3
(
sin ) 2
2
3 4 3,8 3 4 2
2 6
2,6kN
2
d
x L
B
M
F
a F
a
F
a
m
α
+
= −
⋅
+
⋅
−
⋅
+
=
= − ⋅ +
⋅ −
⋅ + = −
{
M
α
+
=
=
=
→
3
( )
2
cos
4 2
4kN
2
d
a E
F
F

182
STATIKA
Ako bi sile nanosili redom s desna u lijevo tada bi posljednji zrak morao
pro
ć
i kroz ta
č
ku
A
. Kontinualno optere
ć
enje je svedeno na ekvivalentni
sistem koncentrisanih sila da bi dobili ta
č
niji dijagam transverzalnih
sila i momenta. Zrak z (zaklju
č
na linija) definisan je ta
č
kom
A
(presje
č
na ta
č
ka zraka 1 i pravca reakcije
A
F
G
) i ta
č
kom presjeka zraka
10 i pravca reakcije
B
F
G
. Reakcija
B
F
G
(poznatog pravca) je izme
đ
u zraka
10 i z (duž
jk
), dok se reakcija
A
F
G
dobija zatvaranjem poligona sila od
ta
č
ke k do a (zrak z i zrak 1). Na slici 5.34a, prikazan je takozvani
"iskrivljeni dijagram momenta". Intezitet reakcija
A
B
F i F
G
G
dobijamo
množenjem duži
ka i jk
sa usvojenom razmjerom za silu U
F
.
Kako napadni moment zavisi samo od transverzalnih sila, nacrtan je
poligon sila i verižni poligon koga
č
ine samo sile upravne na gredu (slika
5.34b) uz izbor položaja pola
P'
da zrak z' (zaklju
č
na linija) bude
horizontalan (udaljenost pola
P'
od pravca sila, H
=
3 cm, proizvoljno se
usvaja). Na taj na
č
in dobija se "ispravljeni" dijagram napadnog
momenta, kome su zraci 1', 2', 3', 4' i 5' obvojnice u polju kontinualnog
optere
ć
enja. Potrebno je ista
ć
i da smo izvršili redukciju dijelova
dijagrama na prepustima grede (
A'A"S"
i
B'B"K"
) s tim da je veli
č
ina
ordinata u karakteristi
č
nim ta
č
kama ostala nepromijenjena.
Sa izabranom razmjerom
t
F
U
, nanose
ć
i sile s lijeva u desno (po
č
evši od
sile
1
q
F
) nacrtan je dijagram transverzalnih sila (slika 5.34c). U polju
kontinualnog optere
ć
enja stvarni dijagram transverzalnih sila dobijen je
povla
č
enjem pravih kroz ta
č
ke po
č
etka i kraja elementarnih polja i
središnje ta
č
ke vektora ekvivalentnih koncentrisanih sila
1
2
3
,
i
q
q
q
F F
F
G
G
G
(slika 5.34c).
Na slici 5.34d, prikazan je dijagram aksijalnih sila nacrtan u razmjeri
U
Fa
. Pri crtanju dijagrama korištene su projekcije sila na horizontalnu
osu grede. Vrijednosti projekcija sila nanose se na vertikali kroz
napadne ta
č
ke sila. Ako aksijalna sila optere
ć
uje presjek na istezanje
smatra se pozitivnom, a na pritisak negativnom. Na osnovu toga su
ozna
č
eni znaci u dijagramu (pozitivan znak iznad nulte linije, a
negativan ispod).
Isti princip ozna
č
avanja primjenjuje se i kod dijagrama transverzalnih
sila dok je kod dijagrama napadnog momenta pozitivna vrijednost (znak
"+") ozna
č
ena ispod nulte linije, a negativna (znak "-") iznad nulte linije.
183
5-RAVNI NOSA
Č
I
Slika 5.34 Grafi
č
ko rješenje zadatka 5.2
4
F
F
ij
U
=
2kN
1cm
t
F
U
=
2kN
1cm
a
F
U
=
2
3
1
1
2
3
'
"
6kN
'
"
m
q
q
q
F
F
F
F
F
F
F
F
d a
I
F
F
F
F
a
F
F
F
F
ab
bc
cd
de
U
U
U
U
F
F
F
F
ef
fg
gh
hi
U
U
U
U
= =
=
=
=
=
=
=
=
=
=
=
=
=
=
M
M
=
=
1m
2kN
,
1cm
1cm
L
F
U
U
=
⋅
⋅
=
⋅
⋅
=
1m 2kN
3cm
1cm 1cm
6kN m
1cm
M
L
F
M
M
U
U U
H
U
U

185
5-RAVNI NOSA
Č
I
∑
M
A
= 0
M
A
– (
F
1
sin 45
0
) a +
F
2
· 2
a
–
F
q
(5
a
–
x
T
) +
F
3
5
a
= 0...................... (c)
Sila
q
F
G
i položaj težišta trapezne površine ra
č
unaju se izrazima:
2
9
9
3
2 1
2
2
2
q
q q
F
a
q a
+
=
=
⋅ ⋅ =
⋅ ⋅
.................................................... (d)
F
q
= 9 kN
3
(2
2 )
4
4
1
3 (2
)
3
3
T
a
q
q
x
a
q q
⋅
+
=
=
⋅ =
⋅
⋅
+
...................................................... (e)
x
T
= 1,33 m
Iz (c):
M
A
= (
F
1
sin 45
0
) a –
F
2
2a +
F
q
(5
a
–
x
T
) –
F
3
5
a
.............................. (c')
2
2 2
1 2 4 1 9 (5 1 1,33) 5 4 1
2
A
M
=
⋅ − ⋅ ⋅ + ⋅ ⋅ −
− ⋅ ⋅
M
A
= 7 kNm
Iz (a) i (b):
X
A
=
F
1
cos 45
0
............................................................................. (a')
Y
A
=
F
1
sin 45
0
–
F
2
+
F
q
–
F
3
.......................................................... (b')
odnosno:
=
=
=
+ − − =
2
2 2
2 kN
2
2
2 2
9 4 4 3 kN
2
A
A
X
Y
Intenzitet i pravac djelovanja reakcije
F
A
definisan je izrazima:
2
2
A
A
A
F
X
Y
=
+
.............................................................................. (f)
2
2
2
3
A
F
=
+
= 3,61 kN
tg
A
A
Y
X
ϕ
=
...................................................................................... (g)
3
arctg
arctg
2
A
A
Y
X
ϕ
=
=
................................................................... (h)
ϕ
≈
56,31
0
Kontrola:
186
STATIKA
+
{
∑
M
B
= 0
F
q
⋅
x
T
–
F
2
⋅
3
a
+ (
F
1
sin 45
0
) 4
a
-
Y
A
⋅
5
a
+
M
A
= 0 .......................(i)
(
)
9 1,33 4 3 1
2 2
2 /2 4 1 3 5 1 7 0
⋅
− ⋅ ⋅ +
⋅
⋅ ⋅ − ⋅ ⋅ + =
Slika 5.36 Konzola oslobo
đ
ena veza sa grafi
č
kim prikazom stati
č
kih
dijagrama dobijenih analiti
č
kim prora
č
unom
3kNm
1cm
M
U
=
2kN
1cm
a
F
U
=
2kN
1cm
t
F
U
=

188
STATIKA
Vrijednosti F
a
, F
t
i M
f
za neke veli
č
ine x date su u tabeli:
0
≤
x
≤
3a
x(m) F
a
(kN) F
t
(kN) M
f
(kNm)
0 0 -4 0
1 0
-0,33
2,11
2 0
2,67
0,89
3 0 5 -3
Vrijednosti aksijalne (
a
F
G
) i transverzalne (
t
F
G
) sile i momenta savijanja
(
f
M
G
) van polja sa kontinualnim optere
ć
enjem u karakteristi
č
nim
ta
č
kama A, C i D definisane su izrazima:
ε
ε
ε
ε
ε
ε
ε
ε
+
−
+
−
+
−
+
−
+
=
=
←
+
=
=
←
+
=
−
= −
=
←
+
=
−
= −
=
←
+
=
=
↑
+
=
=
↑
+
=
−
= −
=
↑
+ ↑
=
−
= −
=
+
(
)
(
)
0
(
)
1
0
(
)
1
(
)
(
)
0
(
)
1
0
(
)
1
2kN
2kN
2
cos 45
2 2 2
0
2
2
cos 45
2 2 2
0
2
3kN
3kN
2
sin 45
3 2 2
1kN
2
2
sin45
3 2 2
1kN
2
l
a A
A
l
a C
A
l
a c
A
l
a D
A
l
t A
A
l
t C
A
l
t C
A
l
t D
A
f
F
X
F
X
F
X
F
F
X
F
F
Y
F
Y
F
Y
F
F
Y
F
M
z
ε
+
= −
= −
= −
+
⋅ = − + ⋅ = −
+
= −
+
⋅
−
⋅ = − + ⋅ −
⋅ = −
+
(
)
0
1
7 kN
7 3 1
4kN
2
2
sin45
7 3 2 2 2
1
3kN
2
l
x A
A
l
fxC
A
A
l
fxD
A
A
M
m
M
M
Y a
m
M
M
Y
a F
a
m
z
z
189
5-RAVNI NOSA
Č
I
Pošto transverzalna sila u polju
BD
mijenja predznak zna
č
i da možemo
odrediti ekstremnu vrijednost momenta ispod kontinualnog optere
ć
enja.
Tu vrijednost odre
đ
ujemo iz uvjeta:
( )
(
)
(
)
( )
( )
= −
=
− +
−
=
−
+
=
− −
±
−
− ⋅ ⋅
=
= ±
⋅
=
=
2
2
2
2
1,2
1
2
0
4 4
0
3
12
12 0
12
12
4 1 12
6 4,9
2 1
10,9 m
1,1 m
d
fx
d
t
o
o
o
o
o
o
o
dM
F
dx
x
x
x
x
x
x
x
Prihvatljivo rješenje je (x
o
)
2
= 1,1 m za koje slijedi ekstremna vrijednost
momenta:
( )
( )
( )
2
2
3
2
2
2
(
)
2
2
1,1
4
2
4 1,1 2(1,1)
2,13kN m
9
9
o
o
fx
f x
o
o
x
M
M
x
x
=
=
−
+
= ⋅
−
+
=
Uzevši u obzir da je
2
(
)
0
o
o
fx
f x
fx
M
M
M
=
=
>
, slijedi da je moment
(
)
o
f x x
M
=
maksimalan, odnosno:
2
max
(
)
2,13kN
o
o
f
fx
f x
fx
M
M
M
M
m
=
=
=
=
Vrijednosti aksijalne i transverzalne sile i momenta savijanja dobijene
prora
č
unom za karakteristi
č
ne presjeke konzole prikazane su pomo
ć
u
dijagrama na slici 5.38.
b) Grafi
č
ko rješenje
Usvojimo razmjeru za dužinu U
L
i za silu U
F
i nacrtamo datu konzolu sa
optere
ć
enjem. Kontinualno optere
ć
enje podijelimo na tri polja i uticaj
svakog polja zamijenimo ekvivalentnom koncentrisanom silom,
intenziteta jednakog površini polja (slika 5.38). Specifi
č
na optere
ć
enja
q
1
i
q
2
odre
đ
ujemo na osnovu promjene specifi
č
nog optere
ć
enja u polju
BD
:
q
1
=
q
+
q
(
x
=2
a
)
=
q
+
q
(1-2
a
/3
a
) = 2 + 2 (1-2/3) = 2,67 kN/m
q
2
=
q
+
q
(
x
=
a
)
=
q
+
q
(1-
a
/3
a
) = 2 + 2 (1-1/3) = 3,33 kN/m
Intenziteti ekvivalentnih koncentrisanih sila
1
2
3
,
,
q
q
q
F F
F
G
G
G
iznose:

191
5-RAVNI NOSA
Č
I
Slika 5.38 Grafi
č
ko rješenje zadatka 5.3
Razmjera:
U
L
= 1 m/1 cm
U
F
= 1 kN/1 cm
ab
=
F
1
/U
F
bc
=
F
2
/U
F
cd
=
F
q
1
/U
F
de
=
F
q
2
/U
F
ef
=
F
q
3
/U
F
fg
=
F
3
/U
F
U
M
=
U
L
⋅
U
F
⋅
H
= 1
⋅
1
⋅
3
U
M
= 3 kNm/1 cm
F
A
=
ga
⋅
U
F
= 3,6
⋅
1 = 3,6 kN
X
A
=
gh
⋅
U
F
= 2
⋅
1 = 2 kN
Y
A
=
ha
⋅
U
F
= 3
⋅
1 = 3 kN
X
1
=
ak
⋅
U
F
= 2
⋅
1 = 2 kN
Y
1
=
kb
⋅
U
F
= 2
⋅
1 = 2 kN
M
A
=
y
A
⋅
U
M
= 2,33
⋅
3 =7 kNm
M
max
=
y
max
⋅
U
M
= 0,7
⋅
3 = 2,1 kNm
192
STATIKA
Zadatak 5.4
Za sistem krutih tijela optere
ć
en prema slici 5.39,
potrebno je:
a) odrediti reakcije svih spoljašnjih i unutrašnjih veza sistema,
b) nacrtati stati
č
ke dijagrame momenta savijanja, aksijalnih i
transverzalnih sila za svako tijelo sistema posebno.
Sopstvene težine greda se zanemaruju. Dati su podaci:
F
= 1 kN,
G
= 1
kN,
M
= 2 kNm,
a
= 4 m,
b
= 3 m,
c
= 2 m,
d
= 1 k m,
e
= 4 m,
f
= 3 m,
g
= 1 m,
q
= 1 kN/m
Slika 5.39 Sistem tijela optere
ć
en koncentrisanim silama,
kontinualnim optere
ć
enjem i spregom sila
Rješenje:
a) Reakcije spoljašnjih i unutrašnjih veza sistema
Reakcije svih spoljašnjih i unutrašnjih veza sistema odredit
ć
emo
analiti
č
ki, razlaganjem datog sistema (slika 5.39) na tri podsistema:
podsistem I – kugla
M
, podsistem II – greda
CD
i podsistem III – greda
(konzola)
AB
(slika 5.40). Uspostavljanjem ravnoteže podsistema bit
ć
e
uravnotežen sistem kao cjelina. Sistem i podsistemi oslobo
đ
eni veza
prikazani su na slici 5.40.

194
STATIKA
Dopunski izrazi potrebni za rješenje sistema jedna
č
ina (c) do (e) prema
slici 5.40 su:
F
N
=
F
N
' ....................................................................................(f)
F
N
=
F
N
' = 2 kN ...............................................................................(g)
(
, )
i
ix
iy
F
F
F
i C A
=
+
=
G
G
G
...................................................................(h)
ix
i
F
X i
=
⋅
G
G
....................................................................................(i)
iy
i
F
Y j
=
⋅
G
G
....................................................................................(j)
X
i
=
F
i
⋅
cos
α
i
.................................................................................(k)
Y
i
=
F
i
⋅
sin
α
i
..................................................................................(l)
2
2
i
i
i
F
X
Y
=
+
................................................................................(m)
tg
i
i
i
Y
X
α
=
....................................................................................(n)
arc tg
i
i
i
Y
X
α
=
.................................................................................(o)
Iz (e)
0
155 kN
cos 30
N
D
M
F
g
F
e
+
⋅
=
=
⋅
................................................................(e')
Iz (d)
Y
C
=
F
N
cos30
0
-
F
D
= 0,577 kN .......................................................(d')
F
u
= -
F
u
' ....................................................................................(p)
F
u
=
F
u
' = 1 kN ..............................................................................(r)
Iz (c)
X
C
=
F
u
–
F
N
cos 60
0
= 0..................................................................(c')
Na osnovu izraza (h) do (o) i slike 5.40b intenzitet, pravac i smjer
reakcije u zglobu C iznosi:
F
C
=
F
CY
....................................................................................(s)
F
C
=
F
CY
=
Y
C
= 0,577 kN ................................................................(t)
α
C
= 90
0
Podsistem III – greda (konzola)
AB
Na gredu
AB
prema slici 5.40c tako
đ
er djeluje proizvoljni sistem sila u
ravni. Kontinualno optere
ć
enje svedeno je na koncentrisanu silu
195
5-RAVNI NOSA
Č
I
F
q
=
q
(
c – d
) =1 kN. Za usvojeni koordinatni sistem O
xy
uslovi ravnoteže
glase:
∑
X
= 0
∑
Y
= 0
∑
M
A
= 0
-
F
+
X
A
= 0 ................................................................................... (u)
-
F
D
' –
F
q
+
Y
A
= 0............................................................................ (v)
-
F
a
/8 +
F
D
'
b
+
F
q
(
c
+
d
)/2 +
M
A
= 0 ............................................. (z)
Dopunski izrazi su:
F
D
' = -
F
D
................................................................................... (x)
F
D
' =
F
D
= 1,155 kN........................................................................ (y)
Iz (u)
X
A
=
F
= 1 kN................................................................................. (u')
Iz (v)
Y
A
=
F
D
' +
F
q
= 2,155 kN................................................................. (v')
Iz (z)
M
A
= F a/8
- F
D
' b – F
q
(c + d)/2 =
= - 4,465 kNm (pogrešno pretpostavljen smjer).............................. (z')
Na osnovu izraza (h) i slike 5.40c, intenzitet, pravac i smjer reakcije
A
F
G
iznose:
2
2
0
2,376kN
arctg
65,11
A
A
A
A
A
A
Y
F
X
Y
X
α
=
+
=
=
=
b) Stati
č
ki dijagrami – dijagrami momenata savijanja
(
)
f
M
G
,
aksijalnih (
a
F
) i transverzalnih (
t
F
) sila
Stati
č
ke dijagrame
ć
emo nacrtati za svako tijelo posebno. Sve sile koje
djeluju na tijelo su sad poznate jer smo odredili reakcije svih veza.
Greda CD
- Analiza po karakteristi
č
nim ta
č
kama (presjecima)
Pri analizi transverzalnih sila, napadnih momenata i aksijalnih sila za
gredu
CD
potrebno je sve sile koje djeluju na tu gredu razložiti u
komponente da budu normalne na osu grede
CD
i kolinearne sa osom
grede
CD
. U tom cilju
ć
emo izra
č
unati:
F
Cy
1
=
F
C
cos 30
0
+
F
u
cos 60
0
= 1 kN ............................................. (w)

197
5-RAVNI NOSA
Č
I
Transverzalna sila (F
t
)
(
)
(
)
(
)
1
(
)
(
)
(
)
(
)
1
0
1kN
1kN
l
t C
l
l
t C
t N
CY
l
l
l
l
t N
t K
t K
t D
CY
N
F
F
F
F
F
F
F
F
F
F
ε
ε
ε
ε
ε
ε
ε
−
+
−
+
−
+
−
+ ↑
=
+ ↑
= + ↑
=
=
+ ↑
= + ↑
= + ↑
= + ↑
=
−
= −
Moment savijanja (M
f
)
1
(
)
1
(
)
(
)
1
0
1kN
(
)
1kN
1kN
(
)
0
l
fC
l
fN
CY
l
f K
CY
N
l
l
f K
f K
l
fD
CY
N
M
M
F
g
m
M
F
f
F f
g
m
M
M
M
m
M
F
e F e g
M
ε
ε
ε
−
+
−
=
+
=
⋅ =
+
=
⋅ −
−
= −
+
=
+
=
+
+
=
⋅ −
−
+
=
+
z
z
z
z
z
z
Greda (konzola) AB
- Analiza po poljima
F
q1
= q x = x
1
1
2
1kN
2,155
(
1)
0,5
0,5
2,155
2,31
d
a
A
d
t
A
q
d
fx
A
q
A
F
X
F
Y
F
x
M
Y
x
F
x M
x
x
+
=
=
→
+ ↓
= −
+
= −
=
⋅
+ −
⋅
−
=
+
= −
⋅
+
−
{
0
≤
x
≤
1 m
x(m) F
a
(kN) F
t
(kN) M
f
(kNm
0 1
-2,155
-2,310
0,25 1 -1,905 -1,803
0,5 1 -1,655
-1,358
0,75 1 -1,405 -0,975
1 1
-1,155
-0,655
Slika. 5.42 Polje I
198
STATIKA
- Analiza po karakteristi
č
nim ta
č
kama (presjecima)
Aksijalna sila (F
a
)
(
)
1
(
)
(
)
(
)
(
)
(
)
(
)
(
)
0
1kN
0
1kN
l
a B
l
l
l
a B
a D
a D
a E
l
a A
l
l
a A
a H
A
F
F
F
F
F
F
F
F
F
X
ε
ε
ε
ε
ε
ε
ε
ε
−
+
−
+
−
−
+
−
+
=
←
+
+
+
+
=
=
=
=
=
←
←
←
←
+
=
←
+
+
=
=
=
←
←
Transverzalna sila (F
t
)
(
)
(
)
(
)
'
(
)
(
)
(
)
(
)
(
)
0
1,155 kN
0
2,155 kN
l
l
l
t A
t A
t D
l
l
t D
t E
D
l
t A
l
l
t A
t H
A
F
F
F
F
F
F
F
F
F
Y
ε
ε
ε
ε
ε
ε
ε
ε
−
+
−
+
−
−
+
−
+ ↑
= + ↑
= + ↑
=
+ ↑
= + ↑
= −
=
+ ↑
=
+ ↑
= + ↑
= −
= −
Moment savijanja (M
f
)
(
)
(
)
'
(
)
(
)
0
/8 0,5 kN
/8 0,5 kN
/8
(
) 0,655 kN
0
4,465 kN
2,31kN
l
f B
l
f B
l
fD
l
fE
D
l
f A
l
f A
A
l
fH
A
A
M
M
F a
m
M
F a
m
M
F a
F
b c
m
M
M
M
m
M
M
Y
d
m
ε
ε
ε
ε
−
+
−
+
=
+
=
⋅
=
+
=
⋅
=
+
=
⋅
−
⋅
−
=
+
=
+
= −
= −
+
= −
+
⋅ = −
+
z
z
z
z
z
z
z
Na osnovu izra
č
unatih vrijednosti za moment savijanja (
)
f
M
G
, aksijalne
(
)
a
F
G
i transverzalne sile ( )
t
F
G
nacrtani su dijagrami na slikama 5.41 i
5.43.

200
STATIKA
Zadatak 5.5
Dat je linijski puni Gerberov nosa
č
AC, optere
ć
en
koncentrisanom silom
F
G
, momentom sprega sila
M
G
i jednakim
kontinualnim optere
ć
enjem q prema slici 5.44. Analiti
č
kim i grafi
č
kim
putem odrediti otpore oslonaca i nacrtati stati
č
ke dijagrame Dati su
podaci:
F
= 4 2 kN,
M
= 6 kNm,
q
= 1 kN/m i
a
= 1 m.
Slika 5.44 Puni linijski Gerberov nosa
č
1. Analiti
č
ko rješenje
a) Otpori oslonaca
Pri odre
đ
ivanju otpora oslonaca potrebno je prvo kontinuirano
optere
ć
enje zamijeniti koncentrisanom silom:
F
q
=
q
2
a
= 1
⋅
2
⋅
1..........................................................................(a)
F
q
= 2 kN
Uticaj oslonaca zamijenimo odgovaraju
ć
im reakcijama tako da imamo
č
etiri nepoznate veli
č
ine
,
,
,
, (ili
,
,
,
)
Ax
Ay
B
C
A
A
B
C
F
F
F F
F
F F
α
G
G
G
G
G
(slika 5.45).
Iz uslova ravnoteže za proizvoljni sistem sila i usvojeni koordinatni
sistem O
xy
slijede tri jedna
č
ine.
Č
etvrtu jedna
č
inu dobijamo iz uslova
da je suma momenata za Gerberov zglob s lijeve ili s desne strane
jednaka nuli. Analiti
č
ki uslovi ravnoteže definisani su jedna
č
inama:
∑
X
= 0
-
X
A
+
X
= 0 ..................................................................(b)
∑
Y
= 0
Y
A
+
F
B
–
Y
–
F
q
+
F
C
= 0...............................................(c)
+
{
∑
M
A
= 0 -
M
+
F
B
2
a
–
Y
3
a
–
F
q
5
a
+
F
C
6
a
= 0............................(d)
0
d
G
M
=
+
{
F
C
2a –
F
q
a = 0 ............................................................(e)
Potrebno je definisati i slijede
ć
e izraze:
A
Ax
F
F
FAy
=
+
G
G
G
..............................................................................(f)
Ax
A
F
X
i
=
⋅
G
G
....................................................................................(g)
Ay
A
F
Y
j
=
⋅
G
G
....................................................................................(h)
201
5-RAVNI NOSA
Č
I
X
A
=
F
A
⋅
cos
α
A
.............................................................................. (i)
Y
A
=
F
A
⋅
sin
α
A
............................................................................... (j)
2
2
A
A
A
F
X
Y
=
+
.............................................................................. (k)
tg
A
A
A
Y
a
X
=
................................................................................... (l)
arctg
A
A
A
Y
X
α
=
............................................................................... (m)
x
y
F
F
F
=
+
G
................................................................................... (n)
x
F
X i
=
⋅
G
G
................................................................................... (o)
y
F
Y j
= ⋅
G
G
................................................................................... (p)
0
2
cos 45
4 2
4kN
2
X
F
=
⋅
=
=
..................................................... (r)
0
2
sin 45
4 2
4kN
2
Y
F
=
⋅
=
=
...................................................... (s)
Iz (e):
F
C
=
F
q
/2 = 2/2 = 1 kN ................................................ (t)
Iz (b):
X
A
=
X
= 4 kN .............................................................. (b')
Iz (d):
F
B
=
M
/2
a
+
Y
3/2 +
F
q
5/2 – 3
F
C
................................ (u)
F
B
= 6/2 + 4
⋅
3/2 + 2
⋅
5/2 – 3
⋅
1 = 11 kN
Iz (c):
Y
A
=
Y
+
F
q
–
F
B
–
F
C
= 4 + 2 – 11-1............................... (c')
Y
A
= -6 kN (pogrešno pretpostavljen smjer)
Pravac i intenzitet reakcije u osloncu
A
odre
đ
eni su izrazima (m) i (k):
0
2
2
6
arctg
56,31
4
4
( 6)
7,21 kN
A
A
F
α
−
=
= −
=
+ −
=
Kontrola:
∑
M
E
= 0
-Y
A
⋅
3a – M – F
B
⋅
a – F
q
⋅
2a – F
C
⋅
3a = 0 ..................... (v)
-(-6)
⋅
3
⋅
1- 6 – 11
⋅
1 – 2
⋅
2
⋅
1 + 1
⋅
3
⋅
1 = 0
b) Stati
č
ki dijagrami momenata savijanja (
f
M
G
), asijalnih (
a
F
G
) i
transverzalnih (
t
F
G
) sila
Stati
č
ke dijagrame za dio nosa
č
a gdje imamo kontinualno optere
ć
enje
odredi
ć
emo analizom po poljima, a na dijelu nosa
č
a gdje nemamo
kontinualno optere
ć
enje analizom po karakteristi
č
nim ta
č
kama
(presjecima), kako je ura
đ
eno u prethodnim primjerima.

203
5-RAVNI NOSA
Č
I
Slika 5.46 Polje
I
- Analiza po poljima
Polje I: 0
≤
x
≤
2a
=
=
+
=
→
+ ↑
= −
+
= −
+ = −
=
⋅ −
⋅
= −
⋅
+
1
1
2
1
0
1
0,5
0,5
q
d
a
d
t
C
q
C
d
fx
C
q
F
q x
x
F
F
F
F
F
x
x
M
F
x F
x
x
x
{
0 < x < 2
a
x(m) F
a
(kN) F
t
(kN) M
fx
(kNm)
0 0 -1 0
0,5 0 -0,5
0,375
1 0 0 0,5
1,5 0 0,5
0,375
2 0 1 0
Prema tabelarnim podacima vidimo da se u polju I ispod kontinualnog
optere
ć
enja javlja ekstremna vrijednost momenta savijanja
M
f
,
jer
transverzalna sila mijenja predznak, mada je iz tabele o
č
igledno da se
za vrijednost
F
t
= 0 na udaljenosti
x
= 1 m od ta
č
ke C, odnosno oslonca
C javlja
M
fmax
= 0,5 kNm. Isto se može pokazati i matemati
č
ki, kako
slijedi:
2
2
2
2
max
(
1)
(
1) 0
1
( 0,5
)
1 0
max
0,5
0,5 kN m
o
d
fx
d
t
o
o
d
fx
o
o
f
f x
o
o
dM
F
x
dx
x
m
d M
d
d
x
x
dx dx
dx
M
M
x
x
=
= −
= −
− =
=
⎛
⎞
=
−
+
= − < →
⎜
⎟
⎝
⎠
=
= −
+
=
Dakle, na udaljenosti
x
= 1 m od oslonca C definisana je ekstremna
vrijednost momenta savijanja
M
f
, a ta ekstremna vrijednost je
maksimalna (jer je drugi izvod negativan).
- Analiza po karakteristi
č
nim ta
č
kama (presjecima)
Aksijalna sila (F
a
)
(
)
0
l
a A
F
ε
−
+
=
←
4 kN
l
aA
A
F
X
+
=
=
←
204
STATIKA
(
)
4 kN
l
a A
F
ε
+
+
=
←
ε
ε
ε
ε
ε
ε
ε
−
+
−
+
−
+
−
+
+
+
+
+
=
=
=
=
=
=
←
←
←
←
←
+
+
=
=
−
=
←
←
(
)
(
)
(
)
(
)
(
)
(
)
(
)
4 kN
0
l
l
l
l
l
a D
a D
a B
a B
a E
A
l
l
a E
a G
A
F
F
F
F
F
X
F
F
X
X
Transverzalna sila (F
t
)
(
)
(
)
(
)
(
)
(
)
0
6 kN
l
t A
l
l
l
l
t A
t D
t D
t B
A
F
F
F
F
F
Y
ε
ε
ε
ε
ε
−
+
−
+
−
+ ↑
=
+ ↑
= + ↑
= + ↑
= + ↑
= −
= −
(
)
(
)
(
)
(
)
6 11 5 kN
6 11 4 1 kN
l
l
t B
t E
A
B
l
l
t E
t G
A
B
F
F
Y
F
F
F
Y
F
Y
ε
ε
ε
ε
+
−
+
−
+ ↑
= + ↑
= −
+
= − +
=
= + ↑
= + ↑
= −
+
−
= − +
− =
Moment savijanja (M
f
)
(
)
(
)
0
6 kN
0
2
6 2 6
6 kN
3
1 kN
4
2
0
l
fA
l
f D
A
l
f D
A
l
fB
A
l
fE
A
B
l
fG
A
B
M
M
Y
a
m
M
Y
a M
M
Y
a M
m
M
Y
a M
F
a
m
M
Y
a M
F
a Y a
ε
ε
−
+
=
+
= −
⋅ = −
+
= −
⋅ +
=
+
= −
⋅
+
= − ⋅ + = −
+
= −
⋅
+
+
⋅ = −
+
= −
⋅
+
+
⋅
− ⋅ =
+
z
z
z
z
z
z
Izra
č
unate vrijednosti momenata savijanja (
f
M
G
), aksijalnih (
a
F
G
) i
transverzalnih (
t
F
G
) sila grafi
č
ki su predstavljene stati
č
kim dijagramima
na slici 5.45.
2. Grafi
č
ko rješenje
Grafi
č
ko rješenje za Gerberov linijski puni nosa
č
bazira se na istim
principima kao za prosti linijski puni nosa
č
obra
đ
en u prethodnim
primjerima. Kontinualno optere
ć
enje podjelimo na dva dijela i
zemijenimo sa odgovaraju
ć
im koncentrisanim silama
F
q
1
i
F
q
2.
Na
osnovu usvojene razmjere za dužinu
U
L
= 1 m/1 cm i silu
U
F
= 2 kN/1
cm nacrtamo nosa
č
i plan sila (slika 5.47 a i f). Verižni poligon crtamo
tako što prvu zraku povla
č
imo kroz nepomi
č
ni oslonac
A
(sile u

206
STATIKA
Zadatak 5.6
Za dati okvirni nosa
č
na slici 5.48 odrediti grafi
č
ki i
analiti
č
ki otpore oslonaca i nacrtati stati
č
ke dijagrame. Dati su podaci:
F
1
= 2 kN,
F
2
= 3 kN,
F
3
= 3 3 kN,
q
= 1 kN/m i
a
= 1 m.
Slika. 5.48 Okvirni nosa
č
Rješenje:
1. Analiti
č
ko rješenje
a) Otpori oslonaca
Okvirni nosa
č
posmatramo kao kruto tijelo. Kontinualno optere
ć
enje
zamijenimo koncentrisanom silom
F
q
=
q
·
4a = 4 kN, a uticaj oslonaca
zamijenit
ć
emo reakcijama veza
,
i
A
Bx
By
F F
F
G
G
G
(slika 5.54). Na nosa
č
sada
djeluje proizvoljni sistem sila u ravni za koji su analiti
č
ki uslovi
ravnoteže definisani za usvojeni kooridnatni sistem O
xy
jedna
č
ina:
∑
X = 0
F
2
–
X
3
–
F
1
+ X
B
= 0 .....................................................(a)
∑
Y
= 0
F
A
–
F
q
-
Y
3
+
Y
B
= 0 ......................................................(b)
+
{
∑
M
B
= 0
F
1
2
a
+
X
3
4
a
+
Y
3
a
+
F
q
3
a – F
2
⋅
3a
–
F
A
4
a
= 0 ............(c)
Reakcija
B
F
G
i sila
3
F
G
razložene na komponente definišu izraze:
B
Bx
By
F
F
F
=
+
G
G
G
................................................................................(d)
Bx
B
F
X
i
=
⋅
G
G
....................................................................................(e)
By
B
F
Y
j
=
⋅
G
G
....................................................................................(f)
207
5-RAVNI NOSA
Č
I
X
B
=
F
B
⋅
cos
α
B
.............................................................................. (g)
Y
B
=
F
B
⋅
sin
α
B
.............................................................................. (h)
2
2
B
B
B
F
X
Y
=
+
.............................................................................. (i)
tg
B
B
AB
Y
a
X
=
.................................................................................. (j)
arctg
B
B
B
Y
X
α
=
............................................................................... (k)
3
3
3
x
y
F
F
F
=
+
G
................................................................................ (l)
3
3
x
F
X
i
=
⋅
G
G
................................................................................... (m)
3
3
y
F
Y
j
=
⋅
G
G
................................................................................... (n)
0
3
3
cos 60
3 3 0,5 2,598 kN
X
F
=
⋅
=
⋅
=
.......................................... (o)
0
3
3
sin 60
3 3 0,866 4,5 kN
Y
F
=
⋅
=
⋅
=
........................................... (p)
Iz (c):
1
3
3
2
2
4
3
3
5,47 kN
4
q
A
F
X
Y
F
F
F
+
+
+
−
=
=
...................................... (r)
Iz (a):
X
B
=
F
1
+
X
3
–
F
2
= 1,598 kN .......................................................... (a')
Iz (b):
Y
B
=
Y
3
+
F
q
–
F
A
= 3,03 kN ............................................................ (b')
Intenzitet i pravac reakcije
B
F
G
, odre
đ
eni izrazima (i) i (k) iznose:
2
2
0
1,598
3,03
3,43 kN
3,03
arctg
62,19
1,598
B
B
F
α
=
+
=
=
=
b) Stati
č
ki diajgrami- dijagrami momenata savijanja (M
f
), aksijalnih
(F
a
) i transverzalnih (F
t
) sila
Prvo se definišu stati
č
ki dijagrami za grede vezane za postolje – stubove
(na slici 5.48, to su grede
AD
i
BH
). Smatra se pri tome da se
posmatranje greda vrši iz unutrašnjosti okvirnog nosa
č
a – ta
č
ka
O
. U
ovom primjeru
ć
e biti prikazan jedan od niza na
č
ina analize i
definisanja stati
č
kih dijagrama. Okvirni nosa
č
rastavit
ć
emo na tri grede
(nosa
č
a):
AD
,
BH
i
CH
, a uticaj jedne na drugu definisat
ć
emo preko
aksijalne i transverzalne sile i momenta savijanja kako slijedi:

209
5-RAVNI NOSA
Č
I
Slika 5.49 Stati
č
ki dijagrami za gredu AD
- Greda BH
Uslovi ravnoteže:
∑
X
= 0
F
Hx
–
F
1
+
X
B
= 0
F
Hx
=
F
1
–
X
B
= 2 – 1,598 = 0,402 kN
∑
Y
= 0
Y
B
–
F
Hy
= 0
F
Hy
=
Y
B
= 3,03 kN
∑
M
D
= 0
-
M
H
–
F
1
⋅
2
a
+
X
B
⋅
4
a
= 0
M
H
=
X
B
⋅
4
a
–
F
1
⋅
2
a
= 2,392 kNm
Aksijalna sila (
a
F
G
)
(
)
(
)
(
)
(
)
(
)
0
3,03 kN
l
a B
l
l
l
l
a B
a M
a M
a H
B
F
F
F
F
F
Y
ε
ε
ε
ε
ε
−
+
−
+
−
+ ↓
=
+ ↓
= + ↓
= + ↓
= + ↓
= −
= −
Transverzalna sila (
t
F
G
)
1
(
)
0
t B
F
ε
−
+
=
←
(
)
(
)
(
)
(
)
1
1,598 kN
0,402kN
l
l
t B
t M
B
l
l
z M
t H
B
F
F
X
F
F
X
F
ε
ε
ε
ε
+
−
+
−
+
+
=
= −
= −
←
←
+
+
=
= −
+
=
←
←
U
Mf
=3 kNm/1cm
U
Ft
= 3 kN/1cm
U
Fa
= 5 kN/1cm
U
L
= 1 m/1 cm
210
STATIKA
Moment savijanja (
f
M
G
)
(
)
1
0
2
3,196 kN
4
2
2,392 kN
d
fB
d
fM
B
d
f H
B
M
M
X
a
m
M
X
a F
a
m
ε
−
=
+
=
⋅
=
+
=
⋅
−
⋅
=
+
{
{
{
Slika 5.50 Stati
č
ki dijagrami grede BH
- Greda CH
- Analiza po poljima
Polje I: 0
≤
x
≤
a
= −
JG
JG
'
Dx
Dx
F
F
F
Dx
=
'
Dx
F
=
X
D
= −
JG
JG
'
Dy
Dy
F
F
F
Dy
=
'
Dy
F
=
Y
D
= −
JJG
JJG
'
D
D
M
M
= −
JG
JG
'
Hx
Hx
F
F
F
Hx
=
'
Hx
F
=
X
H
= −
JG
JG
'
Hy
Hy
F
F
F
Hy
=
'
Hy
F
=
Y
H
= −
JJG
JJG
'
H
H
M
M
U
L
= 1m/1cm
U
Fa
= 3kN/1cm
U
Ft
= 2kN/1cm
U
Mf
= 3kNm/1cm
Slika 5.51 Polje I

212
STATIKA
Moment savijanja (
f
M
G
)
ε
+
=
=
+
=
+
⋅ =
+
'
(
)
'
'
2,392 kN
5,41 kN
d
f H
H
d
fE
H
Hy
M
M
m
M
M
F
a
m
{
{
Slika 5.53 Stati
č
ki dijagrami grede CH
2. Grafi
č
ko rješenje
Otpori oslonaca
Na osnovu razmjere za dužinu
U
L
= 1 m/1 cm nacrtamo okvirni nosa
č
(slika 5.54a). Zatim na osnovu plana sila (slika 5.54b) konstrušemo
verižni poligon u okviru plana položaja. Završnu zraku verižnog
poligona z
1
prenesemo u plan sila iz kojeg o
č
itavamo intenzitet reakcija
oslonaca
A
B
F i F
G
G
. Dakle, postupak je identi
č
an postupcima opisanim u
prethodnim primjerima prora
č
una punih linijskih nosa
č
a. kontinualno
optere
ć
enje treba svesti na koncentrisanu silu
F
q
=
q
·
4
a
= 4 kN. Kako
je nepokretni oslonac na desnoj strani, sile u planu sila nižemo po
č
evši
od sile
1
F
G
, zatim
3
2
, ,
q
F F F
G G G
, a prvi zrak verižnog poligona povla
č
imo iz
ta
č
ke
B
(nepokretnog oslonca).
U
L
= 1 m/1cm
U
Mf
= 5 kNm/1cm
U
Ft
= 5 kN/1cm
U
Fa
= 3 kN/1cm
213
5-RAVNI NOSA
Č
I
a) Plan
položaja
b) Plan sila
Slika 5.54 Grafi
č
ko rješenje zadatka 5.6
ab
=
F
1
/
U
F
= 2/1 = 2 cm
bc
=
F
3
/
U
F
= 3
3
/1 = 3
3
cm
cd
=
F
q
/
U
F
= 4/1 = 4 cm
de
=
F
2
/
U
F
0 3/1 = 3 cm
F
A
=
ef
⋅
U
F
= 5,47
⋅
1= 5,47 kN
F
B
=
fa
⋅
U
F
= 3,43
⋅
1 = 3,43 kN
F
Bx
=
X
B
=
fg
⋅
U
F
= 1,6
⋅
1 = 1,6 kN
F
By
=
Y
B
=
ga
⋅
U
F
= 3
⋅
1 = 3 kN
α
B
= 62,19
0

215
5-RAVNI NOSA
Č
I
iy
i
F
Y j
=
⋅
G
G
................................................................................... (g)
X
i
=
F
i
⋅
cos
α
i
................................................................................. (h)
Y
i
=
F
i
⋅
sin
α
i
................................................................................. (i)
2
2
i
i
i
F
X
Y
=
+
................................................................................ (j)
tg
i
i
i
Y
X
α
=
................................................................................... (k)
arc tg
i
i
i
Y
X
α
=
................................................................................ (l)
Iz (c):
Y
B
= (
F
q
–
F
)/5 = 0.......................................................................... (m)
Iz (d)
X
B
= (
F
–
Y
B
)/3 = 0,67 kN............................................................... (n)
Iz (a):
X
A
=
X
B
= 0,67 kN .......................................................................... (o)
Iz (b):
Y
A
=
F
q
–
Y
B
= 2 kN ........................................................................ (b')
Iz (j) i (l) slijedi:
2
2
2
0
2
2
2
2
0
0,67
0
0,67 kN
0
arctg
arctg
0
0,67
0,67
2
2,11 kN
2
arctg
arctg
71,48
0,67
B
B
B
B
B
B
A
A
A
BA
A
A
F
X
Y
Y
X
F
X
Y
Y
X
α
α
=
+
=
+
=
=
=
=
=
+
=
+
=
=
=
=
b) Stati
č
ki dijagrami – dijagrami momenata savijanja (
f
M
),
aksijalnih (
a
F
G
) i transverzalnih (
t
F
) sila
Stati
č
ke dijagrame odredit
ć
emo kao u prethodnom primjeru prostor
okvirnog nosa
č
a.
- Greda AD
Uslovi ravnoteže:
∑
X
= 0
-
X
A
+
F
–
F
Dx
= 0
F
Dx
=
F
–
X
A
= 1,33 kN
216
STATIKA
∑
Y
= 0
Y
A
–
F
Dy
= 0
F
Hy
=
Y
A
= 2kN
∑
M
D
= 0
-
M
D
–
X
A
⋅
3
a
+
F
⋅
2
a
= 0
M
D
= -
X
A
⋅
3
a
+
F
⋅
2
a
= 2 kNm
Slika 5.56 Stati
č
ki dijagrami grede AD
Aksijalna sila (
F
G
a
)
(
)
(
)
(
)
(
)
2
2 kN
l
a A
A
l
l
l
a C
a C
a D
A
F
Y
KN
F
F
F
Y
ε
ε
ε
ε
+
−
+
−
+
= −
= −
←
+
+
+
=
=
= −
= −
←
←
←
Transverzalna sila (
F
G
t
)
(
)
(
)
(
)
(
)
0,67 kN
1,33 kN
l
l
t A
t C
A
l
l
t C
t D
A
F
F
X
F
F
X
F
ε
ε
ε
ε
+
−
+
−
+ ↑
= + ↑
=
=
+ ↑
= + ↑
=
−
= −
Moment savijanja (
f
M
G
)
(
)
0
0,67 kN
3
2
2 kN
l
fA
l
fMC
A
l
f D
BA
M
M
X
a
m
M
X
a F
a
m
ε
−
=
+
=
⋅ =
+
=
⋅
− ⋅
= −
+
z
z
z
- Greda BE
Uslovi ravnoteže:
U
Mf
= 2kNm/1cm
U
Ft
= 2kN/1cm
U
Fa
= 2kN/1cm
U
L
= 1m/1cm

218
STATIKA
= −
=
=
= −
G
G
G
G
'
'
'
1,33kN
Ex
Ex
Ex
Ex
Dx
Dx
F
F
F
F
F
F
=
=
'
1,33kN
Dx
Dx
F
F
= −
G
G
'
Dy
Dy
F
F
=
=
'
2kN
Dy
Dy
F
F
'
2kN
D
D
M
M
m
=
=
1
0,5
q
F
qx
x
=
=
1
2
1
0
0,5
0,5
0,25
l
a
l
t
q
l
fx
q
F
F
F
x
M
F
x
x
+
=
←
+ ↑
= −
= −
⋅
= −
⋅
= −
+
z
0
≤
x
≤
1 m
x(m) F
a
(kN) Ft(kN) M
fx
(kNm)
0 0 0 0
0,5 0 -0,25
-0,0625
1-
ε
0 -0,5 -0,25
Polje II: 0
≤
x
≤
3 a
F
q
1
=
q
⋅
a
= 0,5 kN
F
q
2
=
q
⋅
a
= 0,5 x
'
1,33
l
a
xD
D
F
F
X
KN
+
= −
= −
= −
←
+ ↑
= −
+
−
= −
+
= −
+
+
⋅ −
−
⋅
= −
⋅
+
−
+
'
1
2
'
'
2
1
2
0,5
1,5
(
/2)
/2
0,25
1,5
2,25
l
t
q
Dy
q
l
fx
q
Dy
D
q
F
F
F
F
x
M
F x a
F
x M
F
x
x
x
z
0
≤
x
≤
3 m
x(m) F
a
(kN) Ft(kN) M
fx
(kNm)
0 -1,33 1,5 -2,25
1 -1,33 1
-1
2 -1,33 0,5 -0,25
3 -1,33 0
0
Analiza po karakteristi
č
nim ta
č
kama (presjecima)
Aksijalna sila (
a
F
G
)
Slika 5.58 Polje I
Slika 5.59 Polje II
219
5-RAVNI NOSA
Č
I
'
(
)
(
)
(
)
(
)
1,33kN
d
d
d
d
a E
a G
a G
a K
E
F
F
F
F
F
ε
ε
ε
ε
+
−
+
−
+
+
+
+
=
=
=
= −
= −
→
→
→
→
Transverzalna sila (
t
F
G
)
(
)
(
)
(
)
(
)
0
d
d
t E
t G
d
d
t G
t K
F
F
F
F
ε
ε
ε
ε
+
−
+
−
+ ↓
= + ↓
=
+ ↓
= + ↓
=
Moment savijanja (
f
M
G
)
0
d
d
d
fE
fG
fK
M
M
M
=
=
=
+
+
+
{
{
{
Slika 5.60 Stati
č
ki dijagrami grede NE
2. Grafi
č
ko rješenje
Otpori oslonaca
Grafi
č
ko odre
đ
ivanje otpora oslonaca prikazano je na slici 5.61. Nacrtan
je plan položaja (slika 5.61a) u razmjeri
U
L
= 1 m/1 cm, a planovi sila
nacrtani su u razmjeri
U
F
= 0,5 kN/1 cm. Planovi sila su definisani na
sljede
ć
i na
č
in: Rezultante sila
L
D
R
R
F i F
G
G
odre
đ
ene pomo
ć
u planova sila
na slici 5.61b predstavljaju rezultante vanjskih sila koje djeluju na
dijelove okvirnog nosa
č
a
AG
i
GB
. Uzimamo da na sistem djeluje samo
U
L
= 1m/1cm
U
Mf
= 2kNm/1cm
U
Ft
= 2kN/1cm
U
Fa
= 2kN/1cm

221
5-RAVNI NOSA
Č
I
Slika 5.61 Grafi
č
ko rješenje zadatka 5.7
F
A
=
fa
·
U
F
= 4,2
⋅
0,5 = 2,1 kN
F
B
=
bf
·
U
F
= 41,35
⋅
0,5 = 0,67 kN
U
F
= 0,5kN/1cm
U
L
= 1m/1cm
a'b'
=
ab
=
F
q
/
U
F
= 2/0,5 = 4 cm
b'c'
=
bc
=
F
/
U
F
= 2/0,5 = 4 cm
c'b'
=
cb
=
F
/
U
F
= 2/0,5 = 4 cm
' '
2,8 kN
4 0,5 2kN
L
R
F
F
D
R
F
F
ac U
a c U
F
F
cb U
=
=
=
=
=
= ⋅
=
' '
5,6 0,5 2,8 kN
' '
4 0,5 2kN
L
R
F
D
R
F
F
a c U
F
F
c b U
=
=
⋅
=
=
=
= ⋅
=
'
'
'
GD
GD
Gl
GL
G
G
F
F
F
F
F
F
= −
= −
= −
222
STATIKA
Zadaci iz indirektnog, posrednog optere
ć
enja grednih
nosa
č
a
Zadatak 5.8
Odrediti reakcije oslonaca osnovnog nosa
č
a AB i dijagrame
transferzalnih sila za nosa
č
AB i CE. Na nosa
č
CE djeluje sila
intenziteta
F
=5 kN i kontinuirano optere
ć
enje q=2 kN/m.
Slika 5.62 Posredno optere
ć
enje nosa
č
a AB
Uticaj sile F prenosi se na oslonce C i D, a uticaj kontinuiranog
optere
ć
enja q na D i E. Na osnovni nosa
č
AB, optere
ć
enje se prenosi
posredno.
0
10
7
2,5 0
10
35 15 0
5 kN
0
0
5 6 5 6
6 kN
B
A
q
A
A
A
q
B
B
q
A
B
B
M
F
F
F
F
F
Y
F
F F
F
F
F
F
F
F
F
=
⋅
− ⋅ −
⋅
=
⋅
−
−
=
=
=
−
−
+
=
=
+
−
= + − =
=
∑
∑
Posmatrat
ć
e se ravnoteža nosa
č
a CE.
Slika 5.63 Ravnoteža nosa
č
a CE
2 m
1 m
3 m
3 m
1 m
A B
q
F
F
q
F
A
F
B
C
D
E
q
=2 kN/m
F
F
q
F''
D
C D
E
1 m
3 m
3 m
I
II
F'
D
F
C
F
E

224
STATIKA
Slika 5.65 Dijagrami transferzalnih sila nosa
č
a AB i CE
2 m
4 m
3 m
1 m
A B
F
E
F
A
F
B
C D
E
F
C
F
D
F
A
F
C
F
D
F
B
F
T
+
F
E
q
=2 kN/m
F
F
q
F''
D
C D
E
1 m
3 m
3 m
I
II
F'
D
F
C
F
E
F
C
F
F'
D
F''
D
F
E
F
T
+
+
225
REŠETKASTI
NOSA
Č
I
6.1 Osnovne karakteristike rešetkastih nosa
č
a
Rešetkom
u statici nazivamo zatvoreni poligon štapova. Štapovi u
poligonu su razmješteni po konturi (konturni štapovi) i popre
č
no
(popre
č
ni štapovi), tako da poligon pretvaraju u niz trokutova. Za trokut
možemo re
ć
i da je u nizu poligona
jedina kruta figura
, koja ne mijenja
svoj oblik, bez obzira kakvo je optere
ć
enje u
č
vorovima (zglobnim
vezama)
poligona. Nosa
č
i, koji se definišu na bazi navedenog sistema
štapova, nazivaju se
rešetkastim nosa
č
ima
.
Dakle, možemo re
ć
i, rešetkastim nosa
č
em naziva se konstrukcija
sastavljena od pravih štapova koji su, ili možemo smatrati da su,
me
đ
usobno zglobno vezani, tako da obrazuju geometrijski
nepromjenljivu figuru, sastavljenu od niza trouglova. Štapovi koji
ograni
č
avaju rešetku nazivaju se
pojasnim štapovima
(gornji i donji
pojas)
a štapovi koji vezuju gornji i donji pojas (unutrašnji štapovi)
nazivaju se štapovi ispune (vertikale ili zatege i dijagonale ili upornice).
Rešetkasti nosa
č
i mogu biti
ravni i prostorni
, odnosno, ako svi štapovi
nosa
č
a leže u jednoj ravni rešetka je ravna, a u protivnom je prostorna.
Ako su rešetkasti nosa
č
i sastavljeni iz trouglova kažemo da su
nepomjerljivi,
a ako su sastavljeni iz mnogougaonika tada su
pomjerljivi.
U daljim izlaganjima bit
ć
e izložene osnove o ravnim i nepomjerljivim
rešetkastim nosa
č
ima, koji mogu imati razli
č
ite oblike. Na slici 6.1,
prikazani su neki oblici rešetkastih nosa
č
a koji su ovisni o namjeni
nosa
č
a.
Veza izme
đ
u dva ili više štapova rešetkastog nosa
č
a u praksi se
naj
č
eš
ć
e ostvaruje pomo
ć
u vijaka, zakovica ili zavarivanjem (slika 6.1).
Zavisno od toga da li se veza ostvaruje izme
đ
u dva ili više štapova,
č
vorovi (zglobovi) rešetkastog nosa
č
a, u prvom slu
č
aju su
prosti,
a u
drugom
složeni.

227
6-REŠETKASTI NOSA
Č
I
Kod prora
č
una rešetkastih nosa
č
a, navedena veza štapova ostvarena
vijcima, zakovicama ili zavarivanjem, radi lakšeg odre
đ
ivanja sila u
štapovima, posmatra se kao zglobna, pri
č
emu se zanemaruje trenje u
zglobovima. Težina štapova se tako
đ
er zanemaruje, u odnosu na sile
koje djeluju na rešetku, a u slu
č
aju da se i ona ipak uzima u obzir, pri
prora
č
unu je treba proporcionalno rasporediti na dva
č
vora na
krajevima svakog od štapova. Tako
đ
er, pretpostavljamo da spoljašnje
sile, koje djeluju na rešetku, imaju napadne ta
č
ke u
č
vorovima i leže u
ravni rešetke. U slu
č
aju posrednog optere
ć
enja rešetke, mora se izvršiti
redukcija tereta na
č
vorove. Na osnovu navedenih pretpostavki možemo
zaklju
č
iti da se kod prora
č
una rešetkatih nosa
č
a smatra da štapovi
nosa
č
a nisu napregnuti na savijanje ve
ć
samo na istezanje ili pritisak.
Model rešetkastog nosa
č
a kod koga su u okviru prora
č
una primjenjene
navedene pretpostavke nazivamo
idealnim rešetkastim nosa
č
em
.
Kod prakti
č
ne izvedbe rešetkastih nosa
č
a pretpostavka o zglobovima
bez trenja nije ispunjena jer su štapovi spojeni na jedan od prethodno
navedenih na
č
ina (zakovice, vijci, zavarivanjem). Uticaj tih krutih
spojeva na stanje naprezanja pojedinih štapova konstrukcije obuhva
ć
en
je obi
č
no u takozvanim
sekundarnim naprezanjima
, koja se, na
primjer, kod mostovskih, krovnih i dizali
č
nih rešetkastih nosa
č
a
uzimaju u obzir kod prora
č
una. Optere
ć
enje rešetkastog nosa
č
a može
biti
proizvoljno, koncentrisano
ili
kontinualno, neposredno
ili
posredno.
Da bi rešetkasti nosa
č
, kao sistem štapova, bio upotrebljiv kao nosa
č
mora biti geometrijski nepromjenljiv, odnosno posmatran kao cjelina
mora imati svojstva krute plo
č
e. Navedenu konstataciju možemo
pokazati na primjeru ravnog
č
etverougla
ABCD
(slika 6.3a) kod koga su
štapovi u
č
vorovima spojeni zglobno.
Č
etverougao
ABCD
predstavlja
pomjerljivu, odnosno figuru koja nije nepromjenljiva, jer uglove možemo
mijenjati, a da pri tome stranice
č
etverougla ostanu iste dužine.
Promjena oblika
č
etverougla
ABCD
možemo sprije
č
iti dodavanjem
jednog dijagonalnog štapa (
AC
ili
BD
). Na taj na
č
in dobijamo dva
trougla, koji predstavljaju najjednostavniji nepromjenljivi (nepomjerljivi,
kruti) sistem štapova (slika 6.3b).
228
STATIKA
Slika 6.3 Karakteristika krutosti rešetkastog nosa
č
a
Rešetkasti ravni nosa
č
formiramo tako da se prvo povežu tri štapa, a
zatim se na taj formirani trougao nadogra
đ
uju novi trouglovi. Za
formiranje svakog narednog trougla potrebna su dva nova štapa i jedan
novi
č
vor. Ako na kraju konstrukcija ima
n
č
vorova, zna
č
i da nam je uz
postoje
ć
a tri
č
vora po
č
etnog trougla potrebno još
n
-3
dodatnih
č
vorova.
S obzirom da se na svaki dodatni
č
vor vežu dva nova štapa, potrebno je
2
⋅
(
n
-3)
novih štapova, pored tri po
č
etna (inicijalna) štapa. Zna
č
i,
ukupan (najmanji) broj štapova rešetkastog ravnog nosa
č
a
konstruisanog od trouglova odre
đ
en je relacijom:
s
=2
⋅
(
n
-3)+3=2
n
-3 ...........................................................................(6.1)
Ako je
s
= 2
n
-3,
rešetkasti nosa
č
je
stati
č
ki odre
đ
en
, a ako je
s
>
2
n
-3
rešetkasti nosa
č
je
stati
č
ki neodre
đ
en
. U slu
č
aju kada je
s
<
2
n
-3
rešetkasti nosa
č
je
promjenljiv ili labilan
, odnosno, kao nosa
č
je
neupotrebljiv.
Potrebno je ista
č
i da rešetkasti nosa
č
i mogu biti izvedeni tako da u
njima nemamo suvišnih štapova ali i tako da u njima imamo jedan ili
više štapova viška. Karakteristika rešetkastog nosa
č
a sa viškom štapova
je da uklanjanjem suvišnih štapova nosa
č
ne gubi svojstva geometrijske
nepromjenljivosti. Primjer takvog rešetkastog nosa
č
a prikazan je na slici
6.4. Uklanjanjem jednog od dijagonalnih štapova ne
ć
e se narušiti
nepromjenljivost geometrijskog oblika nosa
č
a.
Slika 6.4. Rešetkasti nosa
č
i sa štapom viška u konstrukciji

230
STATIKA
poligona kao kod proste grede optere
ć
ene koncentrisanim silama.
Na osnovu usvojene razmjere za dužinu
U
L
i silu
U
F
nacrtat
ć
emo
rešetkasti nosa
č
, poligon sila i verižni poligon.
Slika 6.6 Odre
đ
ivanje otpora oslonaca rešetkastog nosa
č
a grafi
č
kom
metodom
Pomo
ć
u poligona (plana) sila (slika 6.6b) definisane su zrake verižnog
poligona (slika 6.6a) 1, 2 i 3. Prvu zraku verižnog poligona treba povu
ć
i
kroz nepokretni oslonac
A
(I) i spajanjem te ta
č
ke sa ta
č
kom (II) gdje
zraka 3 presjeca napadnu liniju reakcije
B
F
, odredili smo završnu
stanu, odnosno zaklju
č
nu liniju (s) verižnog poligona, a time i reakcije
oslonaca
A
F
i
B
F
.
Analiti
č
kim putem otpore oslonaca odre
đ
ujemo na osnovu jedna
č
ina
stati
č
ke ravnoteže ravanskog proizvoljnog sistema sila koje djeluju na
rešetkasti nosa
č
:
∑
X
= 0
F
1
cos
α
-
X
A
= 0.............................................................................(6.3)
10 kN
1,4 cm
14kN
1cm
10 kN
2,4 cm
24kN
1cm
A
F
B
F
F
da U
F
cd U
=
⋅
=
=
=
⋅
=
=
1m
1cm
10 kN
1cm
L
F
U
U
=
=
231
6-REŠETKASTI NOSA
Č
I
∑
Y
= 0
Y
A
-
F
1
sin
α
-
F
2
+
F
B
= 0 ................................................................ (6.4)
∑
M
A
= 0
F
B
⋅
2
a
–
F
2
⋅
2
a
– (
F
1
cos
α
)
⋅
2
a
= 0 ............................................... (6.5)
odakle slijedi:
F
B
=
F
2
+
F
1
cos
α
= 10 + 20
⋅
0,70711 ........................................... (6.6)
F
B
= 24,14 kN
X
A
=
F
1
cos
α
= 20
⋅
0,70711 .......................................................... (6.7)
X
A
= 14,14 kN
Y
A
=
F
1
sin
α
+
F
2
-
F
B
= 20
⋅
0,70711 – 24,14.................................. (6.8)
Y
A
= 0
=
+
=
+
2
2
2
14,14
0
A
A
A
F
X
Y
........................................................ (6.9)
14,14kN
A
F
=
Na ovaj na
č
in odre
đ
ene su sve spoljašnje sile koje djeluju na dati
rešetkasti nosa
č
.
6.3
Odre
đ
ivanje sila u štapovima rešetkastog
nosa
č
a
Kao posljedica djelovanja spoljašnjih sila u
č
vorovima rešetkastog
nosa
č
a, u štapovima
ć
e se pojaviti
unutrašnje
sile. Da bi rešetkasti
nosa
č
bio u ravnoteži moraju i spoljašnje sile (optere
ć
enje i otpori
oslonaca) i unutrašnje sile biti u ravnoteži.
Unutrašnje sile štapova rešetkastog nosa
č
a mogu da se odrede
primjenom odgovaraju
ć
ih grafi
č
kih i grafoanaliti
č
kih metoda. Za dati
primjer, unutrašnje sile u štapovima odredit
ć
emo primjenom metode
isijecanja
č
vorova, Kremoninom, Kulmanovom i Riterovom metodom.
6.3.1 Metoda isijecanja
č
vorova
Odre
đ
ivanje sila u štapovima rešetkastog nosa
č
a metodom isijecanja
č
vorova, svodi se na analiti
č
ko i grafi
č
ko rješavanje zadataka iz
ravnoteže ravnog sistema su
č
eljnih sila, s obzirom na to da sve
spoljašnje sile djeluju u zglobovima (
č
vorovima) rešetkastog nosa
č
a, a
presjecanjem štapova, sile u štapovima imaju pravac ose štapa.
Isijecanje
č
vorova zapo
č
injemo od takozvanog prostog
č
vora, to jest od

233
6-REŠETKASTI NOSA
Č
I
Slika 6.8 Odre
đ
ivanje otpora oslonaca grafi
č
kim putem i sila u štapovima
metodom isijecanja
č
vorova
a)
b)
c)
d)
e)
f)
g)
=
⋅
=
=
=
⋅
=
=
10 kN
2 cm
20 kN
1cm
10 kN
1,25 cm
12,5 kN
1cm
A
F
B
F
F
da U
F
cd U
=
=
1m
1cm
10 kN
1cm
L
F
U
U
234
STATIKA
Otpori oslonaca.
Otpori oslonaca i u ovom primjeru odre
đ
eni su
grafi
č
ki i analiti
č
ki kao u prethodnom primjeru. Dakle, na osnovu
usvojene razmjere za dužinu
U
L
i silu
U
F
nacrtan je rešetkasti nosa
č
(plan položaja), poligon sila i verižni poligon.
Pomo
ć
u poligona sila (slika 6.8b) odre
đ
ene su, pomo
ć
u proizvoljno
izabranog pola P, zrake verižnog poligona (slika 6.8a) 1', 2' i 3'. Prvu
zraku verižnog poligona treba povu
ć
i kroz nepokretni oslonac
A
i
spajanjem te ta
č
ke sa ta
č
kom
C,
gdje zraka 3' presjeca napadnu liniju
reakcije
B
F
G
, odredili smo završnu stranu, odnosno zaklju
č
nu liniju (s)
verižnog poligona, a time i reakcije oslonaca
1
2
i
F
F
G
G
.
Analiti
č
kim putem otpore oslonaca odre
đ
ujemo na osnovu jedna
č
ina
stati
č
ke ravnoteže ravanskog proizvoljnog sistema sila koje djeluju na
rešetkasti nosa
č
:
∑
X
= 0
F
1
-
X
A
= 0......................................................................................(6.11)
∑
Y
= 0
Y
A
-
F
2
+
F
B
= 0................................................................................(6.12)
∑
M
A
= 0
F
B
⋅
4
a
–
F
2
⋅
3
a
–
F
1
⋅
a
= 0.............................................................(6.13)
odakle slijedi:
X
A
= F
1
= 20 kN..............................................................................(6.14)
1
2
3
20 3 10
4
4
B
F
F
F
+
+ ⋅
=
=
..............................................................(6.15)
F
B
= 12,5 kN ..................................................................................(6.16)
Y
A
= F
2
– F
B
= 10 – 12,5..................................................................(6.17)
Y
A
= -2,4 kN
(znak "-" ukazuje na pogrešno pretpostavljen smjer).
Intezitet reakcije u osloncu A definisan je izrazom:
2
2
2
2
20
( 2,5)
20,16kN,
A
A
A
A
F
X
Y
F
=
+
=
+ −
=
......................................................(6.18)
a pravac djelovanja prema slici 6.8a odre
đ
en je izrazom:
2,5
tg
20
A
A
Y
X
α
=
=
.............................................................................(6.19)
α
= arc tg 0,125 .............................................................................(6.20)
α
= 7,13
0
ili
α
≈
7
0
7'48"

236
STATIKA
na pritisak. Na drugom kraju štapa 3 djeluje sila
'
3
u
F
G
, pri
č
emu je
'
3
3
u
u
F
F
= −
G
G
, a na drugom kraju štapa 4 djeluje sila
'
4
u
F
G
, pri
č
emu je
'
4
u
F
G
=
4
u
F
G
.
Isjecanjem
č
vora III dobit
ć
emo da na njega djeluju poznate sile
'
'
2
3
i
u
u
F
F
G
G
i nepoznate sile (reakcije štapova 5 i 6)
5
6
i
u
u
F
F
G
G
. Oblik
poligona sila za
č
vor III dat je na slici 6.8e. Na osnovu vektora sila
5
6
i
u
u
F
F
G
G
sa nazna
č
enim pravcem i smjerom djelovanja prenesenim u
č
vor III vidimo da su štapovi 5 i 6 napregnuti na zatezanje. Pošto su
štapovi 5 i 6 u ravnoteži slijedi: da na drugom kraju tih štapova djeluju
sile
'
5
u
F
G
(
'
5
u
F
G
= -
'
5
6
6
6
) i
,(
).
u
u
u
u
F
F
F
F
= −
G
G
G
G
Analizom isjecanja
č
vorova I, II i III možemo da uo
č
imo da su odre
đ
ene
sve sile u štapovima izuzev sile (reakcije) u štapu 7. Silu u štapu 7
možemo da odredimo isjecanjem
č
vora IV sile
'
'
4
5
2
,
i
u
u
F
F
F
G
G
G
i nepoznata
sila (reakcija štapa 7)
7
u
F
G
. Sila
7
u
F
G
odre
đ
ena je oblikom poligona sila
koje djeluju u
č
voru 4 prikazanom na slici 6.8f. Na osnovu pravca i
smjera vektora sila
7
u
F
G
prenešenog u
č
vor IV slijedi da je štap 7
napregnut na pritisak. Pošto se štap 7 nalazi u ravnoteži to zna
č
i da na
štap u
č
vorovima IV i V djeluju sile
7
u
F
G
i
'
7
u
F
G
pri
č
emu je
'
7
u
F
G
= -
7
u
F
G
.
Isjecanje
č
vora V u ovom slu
č
aju, uzevši u obzir da su odre
đ
ene sve sile
u štapovima rešetkastog nosa
č
a, može da posluži samo kao kontrola
ta
č
nosti rješenja, kojim su odre
đ
ene sile u štapovima 6 i 7. Poligon sila
vezan za
č
vor V prikazan je na slici 6.8g. Pore
đ
enjem tog poligona sila
sa poligonima sila
č
vorova III i IV dolazimo do zaklju
č
ka da su sile u
štapovima 6 i 7 iste, odnosno, da su ta
č
no i pravilno odre
đ
ene u sva tri
č
vora.
Sli
č
no kao u slu
č
aju
č
vora I, na osnovu poligona sila ostalih
č
vorova (II
do V) možemo grafi
č
ki odrediti intezitete svih sila u štapovima
rešetkastog nosa
č
a i oni iznose:
Č
vor II (slika 6.8d):
3
10 kN
0,35cm
3,5 kN
1cm
u
F
F
da U
=
⋅
=
=
4
10 kN
1,50cm
15,0 kN
1cm
u
F
F
cd U
=
⋅
=
=
Č
vor III (slika 6.8e):
5
10 kN
0,35cm
3,5 kN
1cm
u
F
F
cd U
=
⋅
=
=
237
6-REŠETKASTI NOSA
Č
I
6
10 kN
1,25cm
12,5 kN
1cm
u
F
F
da U
=
⋅
=
=
Č
vor IV (slika 6.8f):
7
10 kN
1,77cm
17,7 kN
1cm
u
F
F
da U
=
⋅
=
=
Č
vor V (slika 6.8g):
'
7
7
10 kN
1,77cm
17,7 kN
1cm
u
u
F
F
F
ca U
=
=
⋅
=
=
Analiti
č
ko rješenje u slu
č
aju metode izrezivanja
č
vorova svodi se na
postavljanje jedna
č
ina stati
č
ke ravnoteže ravanskog su
č
eljnog sistema
sila, za svaki
č
vor posebno, na osnovu
č
ega iz postavljenih jedna
č
ina
izra
č
unavamo nepoznate sile u štapovima.
Za dati primjer slijedi:
Č
vor I (slika 6.8c)
∑
X
= 0
F
u
1
⋅
cos 45
0
+
F
u
2
–
F
A
cos
α
= 0 .................................................... (6.21)
∑
Y
= 0
F
u
1
sin 45
0
–
F
A
sin
α
= 0 ............................................................... (6.22)
Č
vor II (slika 6.8d)
∑
X
= 0
F
1
–
F
u
4
–
F
u
3
⋅
cos 45
0
-
F'
u
1
cos 45
0
= 0 ....................................... (6.23)
∑
Y
= 0
F
u
3
sin 45
0
–
F'
u
1
sin 45
0
= 0.......................................................... (6.24)
Č
vor III (slika 6.8.e)
∑
X
= 0
F
u
6
+
F
u
5
⋅
cos 45
0
+
F'
u
3
cos 45
0
-
F'
u
2
= 0..................................... (6.25)
∑
Y
= 0
F
u
5
sin 45
0
–
F'
u
3
sin 45
0
= 0.......................................................... (6.26)
Č
vor IV (slika 6.8f)
∑
X
= 0
F'
u
4
-
F
u
7
⋅
cos 45
0
-
F'
u
5
cos 45
0
= 0.............................................. (6.27)
∑
Y
= 0

239
6-REŠETKASTI NOSA
Č
I
Konstrukcijom tzv. Kremoninog plana sila vrši se objedinjavanje svih
poligona sila, konstruisanim za svaki
č
vor posebno, pri
ć
emu se svaka
sila u odgovaraju
ć
em štapu javlja samo jedanput. Iz navedenog možemo
izvu
ć
i zaklju
č
ak da Kremonin metod predstavlja
grafi
č
ku metodu
za
odre
đ
ivanje sila u štapovima rešetkastog nosa
č
a.
Slika 6.9 Odre
đ
ivanje sila u štapovima primjenom Kremonine metode
1m
1cm
5 kN
1cm
L
F
U
U
=
=
1
2
A
F
F
F
B
F
F
ab
U
F
bc
U
F
cd
U
F
da
U
=
=
=
=
3
4
7
Sila u kN
Štap
zatezanje
(+)
pritisak
(-)
1 3,5
2 17,5
3
3,5
4 15,0
5 3,5
6 12,5
7 18,0
1
2
3
4
'
5
'
6
7
(
1,2,3, 4,5,6,7)
u
F
u
F
u
F
u
F
u
F
ui
ui
u
F
ui
ui
u
F
F
be U
F
ca U
F
fe U
F
cf U
F
fg U
F
F
F
ga U
F
F
F
dg U
i
=
⋅
=
⋅
=
⋅
=
⋅
=
⋅
=
−
=
⋅
=
=
⋅
=
G
G
240
STATIKA
Prije nego što se konstruiše Kremenin plan sila, potrebno je prvo
odrediti reakcije (otpore) oslonaca grafi
č
kim ili analiti
č
kim putem i
provjeriti da li je rešetkasti nosa
č
stati
č
ki odre
đ
en.
Da bi rešetkasti nosa
č
bio u ravnoteži moraju sve spoljašnje i
unutrašnje sile (u spoljašnje sile ubrajamo i reakcije oslonaca) biti u
ravnoteži, a to zna
č
i da poligoni svih spoljašnjih i unutrašnjih sila
moraju biti
zatvoreni.
Konstrukcija poligona spoljašnjih sila zapo
č
inje
od proizvoljne ta
č
ke (a), polaze
ć
i od bilo koje spoljašnje sile. Sile treba
nanositi u izabranoj razmjeri sa definisanim pravcem, smjerom i
intenzitetom, onim redom kojim nailazimo na njih pri obilaženju
rešetkastog nosa
č
a u utvr
đ
enom smjeru. Mi
ć
emo usvojiti
smjer
kretanja kazaljke na satu.
Za ilustraciju primjene Kremoninog metoda mi
ć
emo iskoristiti
prethodni primjer za koji smo ve
ć
odredili otpore (reakcije) oslonaca i
sile u štapovima metodom izrezivanja
č
vorova.
Polaze
ć
i od proizvoljne ta
č
ke (
a
) prenosimo redom sve spoljašnje sile
obilaze
ć
i oko rešetke u smjeru kretanja kazaljke na satu (slika 6.9).
Vektor
ab
predstavlja silu
A
F
G
. Iz ta
č
ke (
b
) povla
č
imo vektor
bc
koji
predstavlja silu
1
F
G
, a zatim iz ta
č
ke (
c
) povla
č
imo vektor
cd
koji
predstavlja silu
2
F
G
. Na kraju iz ta
č
ke (
d
) povla
č
imo vektor
da
koji
predstavlja silu
B
F
G
. Povla
č
enjem vektora
da
koji definiše silu
B
F
G
dobili
smo
zatvoren poligon spoljašnjih sila
abcda
, što zna
č
i da su sve
spoljašnje sile u ravnoteži
. Redoslijed nanošenja sila mogao je biti i
druga
č
iji, a smjer obilaženja rešetkastog nosa
č
a mogao je biti suprotan
kretanju kazaljke na satu. Koji
ć
emo smjer izabrati, sporedno je, ali je
veoma bitno izabrani smjer zadržati do kraja rješenja zadatka.
Kada smo zatvorili poligon spoljašnjih sila (slika 6.9b), ostaje da
konstruišemo zatvoreni poligon unutrašnjih sila u štapovima
rešetkastog nosa
č
a. Konstrukciju poligona unutrašnjih sila po
č
et
ć
emo
isjecanjem
č
vora I. Da bi on bio u ravnoteži, u štapovima 1 i 2 moraju
djelovati sile koje definišu uticaj odba
č
enog dijela rešetke i
uravnotežavaju silu otpora oslonca
A
,
A
F
G
. Da bi sistem sila koje djeluju
na
č
vor I (
1
2
,
i
u
u
A
F
F
F
G
G
G
) bio u ravnoteži, pravci tih sila moraju se sje
ć
i u
jednoj ta
č
ki (
č
voru I) i formirati zatvoren trougao sila, odnosno silu
A
F
G
poznatog pravca, intenziteta i smjera treba razložiti na komponente, sile
1
2
u
u
F i F
G
u štapovima 1 i 2, poznatih pravaca djelovanja, poštivaju
ć
i
uslove ravnoteže. Intenzitet sila
1
2
u
u
F i F
G
odredit
ć
emo povla
č
enjem
pravaca, paralelno štapovima 1 i 2, iz ta
č
aka (
a
) i (
b
) u poligonu sila.
Presjek ta dva pravca definiše ta
č
ku (e). Dužine
i
be ea
definišu, u

242
STATIKA
Polaze
ć
i od
najniže poznate sile
'
'
1
1
1
(
)
u
u
u
F F
F
=
G
kre
ć
u
ć
i se u smjeru
kretanja kazaljke na satu definišemo poligon sila koje djeluju u
č
voru II.
Pošto je smjer sile u štapu 1 definisan strelicom iscrtanom
u lijevo
naniže
polazimo do ta
č
ke (
e
) u tom smjeru do ta
č
ke (
b
) iz koje je
definisan vektor sile
1
F
G
, do ta
č
ke (
c
). Ako iz ta
č
aka (
c
) i (
e
) povu
č
emo
pravce paralelno štapovima 3 i 4 u presjeku tih pravaca dobit
ć
emo
ta
č
ku (
f
). Dužine
cf i
fe
, u izabranoj razmjeri, definišu intenzitet sila
u štapovima 4 i 3 (
4
3
i
u
u
F
F
G
). Da bi poligon sila bio zatvoren smjer
vektora sile
4
u
F
G
mora biti ka ta
č
ki (
f
), a vektora sile
3
u
F
G
ka ta
č
ki (
e
).
navedene smjerove prenosimo na štapove 3 i 4 kod
č
vora II, a na
suprotnim krajevima štapova 3 i 4 u
č
vorovima III i IV strelice
ucrtavamo sa
suprotnim
smjerom, odnosno sa smjerom ka
č
vorovima
III i IV. Na osnovu smjerova sila
3
4
i
u
u
F
F
G
, odnosno ucrtanih strelica
koje definišu reakcije štapova 3 i 4 zaklju
č
ujemo da su štapovi 3 i 4
napregnuti na pritisak.
Na isti na
č
in ispitat
ć
emo ravnotežu
č
vora III. Poligon sila definišemo
polaze
ć
i od najniže poznate sile
'
2
u
F
kre
ć
u
ć
i se u smjeru kretanja
kazaljke na satu. Poznate sile
'
'
2
3
u
u
F
i F
G
u poligonu sila definisane su
dužine
ae i
ef
. Paralelno štapovima 5 i 6 iz ta
č
aka (
f
) i (
a
) povla
č
imo
pravce koji se sijeku u ta
č
ki (
g
). Duži
fg i
ga
definišu, u izabranoj
razmjeri, intenzitet sila u štapovima 5 i 6 (
5
6
u
u
F
i F
G
). Uzevši u obzir da je
smjer vektora sile
'
2
u
F
ka ta
č
ki (
e
) i vektora sile
'
3
u
F
ka ta
č
ki (
f
), da bi
poligon sila bio zatvoren smjer vektora sile
5
u
F
G
mora biti ka ta
č
ki (
g
), a
vektora sile
6
u
F
G
ka ta
č
ki (
a
). Definisane smjerove pomo
ć
u strelica
ucrtavamo kod
č
vora III, a na suprotnim krajevima štapova 5 i 6 (
č
vor
IV i V) strelice ucrtavamo sa suprotnim smjerom (od
č
vora IV i V). Na
osnovu smjera definisanog strelicama zaklju
č
ujemo da su štapovi 5 i 6
napregnuti na zatezanje.
Nakon analize
č
vora III možemo ispitati ravnotežu bilo kojeg od
preostala dva
č
vora IV i V, s obzirom da su, za oba ta
č
vora, poznate sve
sile izuzev sile u štapu 7 (
7
u
F
G
). Ako silu u štapu 7 želimo odrediti preko
č
vora IV poligon sila bit
ć
e definisan vektorima poznatih sila
'
'
5
4
2
,
u
u
F
F
i F
G
G
i vektorom nepoznate sile
7
u
F
G
. Polaze
ć
i od najniže poznate
sile u
č
voru IV,
'
5
u
F
G
formiramo poligon sila
gfcdg
. Vektori sila
'
'
5
4
2
,
u
u
F
F
i F
G
G
ve
ć
su kroz prethodnu analizu susjednih
č
vorova odre
đ
eni,
tako da povla
č
enjem pravca paralelno štapu 7 iz ta
č
ke (
d
) ka ta
č
ki (
g
)
zatvaramo poligon sila koje djeluju u
č
voru IV. Uzevši u obzir smjerove
243
6-REŠETKASTI NOSA
Č
I
vektora poznatih sila u
č
voru IV da bi poligon sila bio zatvoren vektor
nepoznate sile u štapu 7 (
7
u
F
G
) mora biti usmjeren ka ta
č
ki (
g
). Duž
dg
,
u izabranoj razmjeri definiše intenzitet sile
7
u
F
G
. Definisani smjer
vektora sile
7
u
F
G
u poligonu sila ucrtavamo kod
č
vora IV, a u
č
voru V
strelicu ucrtavamo sa suprotnim smjerom (ka
č
voru V). Na osnovu
ucrtanih strelica možemo da zaklju
č
imo da je štap 7 napregnut na
pritisak.
Analizom
č
vora V možemo da ispitamo ta
č
nost konstrukcije plana sila.
Polaze
ć
i od sile
B
F
G
kao najniže poznate sile u
č
voru V definišemo
poligon sila
dagd
koji je zatvoren, što zna
č
i da je
č
vor V u ravnoteži,
odnosno da je konstrukcija plana sila ta
č
na.
Na taj na
č
in dobili smo zatvoren poligon spoljašnjih i unutrašnjih sila, a
izvedena grafi
č
ka konstrukcija na slici 6.9b, naziva se
Kremonin plan
sila
. Na osnovu Kremoninog plana sila grafi
č
ki je u potpunosti odre
đ
en
karakter i intenzitet sila u štapovima rešetkastog nosa
č
a. Za analizirani
primjer ovi podaci pregledno su unešeni u tablicu (slika 6.9b).
Potrebno je još jednom ista
č
i da pri konstrukciji Kremoninog plana sila
treba strogo voditi ra
č
una o usvojenom smjeru obilaženja oko cijelog
rešetkastog nosa
č
a pri crtanju plana spoljašnjih sila, kao i oko svakog
č
vora posebno.
Kremonin plan sila i plan rešetkastog nosa
č
a su
recipro
č
ne figure
.
Reciprocitet se ogleda u tome što: obje figure imaju isti broj stranica
(linija), odgovaraju
ć
e strane obiju figura su me
đ
usobno paralelne;
svakom
č
voru rešetkastog nosa
č
a odgovara u Kremoninom planu sila
zatvoren poligon obrazovan od stranica koje su paralelne silama u
č
voru
i obrnuto i svakom tjemenu Kremoninog plana sila odgovara zatvoren
poligon rešetkastog nosa
č
a. U slu
č
aju da je rešetkasti nosa
č
simetri
č
no
optere
ć
en, Kremonin plan sila, kao recipro
č
na figura, mora biti
simetr
č
an, pa je dovoljno nacrtati samo polovinu plana.
6.3.3. Kulmanova metoda
Kada želimo odrediti veli
č
inu i karakter (zatezanje ili pritisak) sila samo
u pojedinim štapovima rešetkastog nosa
č
a primjenjujemo
Kulmanovu
metodu
. Kulmanova metoda predstavlja
grafi
č
ku metodu
razlaganja
sile poznatog pravca, smjera i inteziteta na tri komponente, odnosno tri
nekolinearna poznata pravca. Pomo
ć
u ove metode mogu
ć
e je odrediti
veli
č
inu i karakter sila u
najviše tri štapa rešetkastog nosa
č
a
, pri
ć
emu treba voditi ra
č
una da ti štapovi
ne mogu da se sjeku u jednoj
ta
č
ki (ne mogu sva tri štapa imati vezu u jednom
č
voru).

245
6-REŠETKASTI NOSA
Č
I
primijeniti Kulmanovu metodu; odnosno trebamo rezultantu spoljašnjih
sila
d
R
F
G
razložiti na tri pravca 4, 5 i 6, to jest, tri komponente
4
5
6
,
u
u
u
F
F
i F
G
G
, pod uslovima ravnoteže koji se odnose na ravnotežu
slobodnog krutog tijela na koji djeluje ravanski proizvoljni sistem sila.
Grafi
č
ki gledano, poligon obrazovan od sila
d
R
F
G
,
4
5
6
,
u
u
u
F
F
i F
G
G
za slu
č
aj
ravnoteže mora biti zatvoren. Karakteristika primjene Kulmanove
metode u ovom slu
č
aju ogleda se u tome da problem ravnoteže
isje
č
enog dijela rešetkastog nosa
č
a na koji djeluju
č
etiri sile svodimo na
problem ravnoteže krutog tijela pod dejstvom dvije sile. Da bi postigli
navedeno potrebno je za po dvije sile sistema sila
d
R
F
G
,
4
5
6
,
u
u
u
F
F
i F
G
G
odrediti rezultantu, tako da dobijemo da na posmatrani isje
č
ak
rešetkastog nosa
č
a djeluju samo dvije sile, pri
č
emu, na osnovu prvog
aksioma statike, te dvije sile moraju biti istog intenziteta i pravca, a
suprotnog smjera, za slu
č
aj ravnoteže posmatranog isje
č
ka rešetkastog
nosa
č
a. Pravac djelovanja dviju rezultanti navedenog sistema od
č
etiri
sile, koje djeluju na posmatrani isje
č
ak rešetkastog nosa
č
a, odre
đ
en je
ta
č
kama
M
i
N
(slika 6.10.a). Ta
č
ka
M
definisana je presjekom pravaca
sila
d
R
F
G
i
6
u
F
G
, a kroz nju prolazi i pravac rezultante ove dvije sile.
Analogno navedenom ta
č
ka
N
definisana je presjekom pravaca sila
5
u
F
G
i
4
u
F
G
, a kroz nju prolazi pravac rezultante ove dvije sile. Rezultanta
spoljašnjih sila
d
R
F
G
odre
đ
ena je pomo
ć
u verižnog poligona i plana sila
kako je prikazano na slici 6.10 a i b. Pošto su sile
4
u
F
G
i
5
u
F
G
kao i sile
d
R
F
G
i
6
u
F
G
zamjenjene odgovaraju
č
im rezultantama, da bi se posmatrani
dio rešetkastog nosa
č
a nalazio u ravnoteži, moraju rezultante
posmatranih pravaca sila biti istog intenziteta i pravca djelovanja, a
suprotnog smjera. Zbog toga pravac djelovanja tih dviju rezultanti mora
biti odre
đ
en ta
č
kama
M
i
N
. Prava koja prolazi kroz ove dvije ta
č
ke
definiše pravac djelovanja rezultanti izabranih parova sila
4
u
F
G
,
5
u
F
G
i
d
R
F
G
,
6
u
F
G
i naziva se
Kulmanova prava
. Ozna
č
avat
ć
emo je slovom K
(slika 6.10a). Kada smo odredili Kulmanovu pravu možemo konstruisati
zatvoreni
č
etverougao sila
d
R
F
G
,
4
u
F
G
,
5
u
F
G
i
6
u
F
G
, odnosno odrediti sile u
štapovima 4, 5 i 6. Postupamo na slijede
ć
i na
č
in (slika 6.10c): prvo u
odgovaraju
ć
oj usvojenoj razmjeri za silu
U
F
iz proizvoljne ta
č
ke
a'
povu
č
emo vektor ' '
a b
, koji predstavlja silu
d
R
F
G
, a zatim se iz ta
č
aka
a'
i
b'
povuku pravci paralelni štapu 6 i Kulmanovoj pravoj iz plana položaja
(slika 6.10 a i c). U presjeku ova dva pravca definisana je ta
č
ka
c'
koja
predstavja tjeme
č
etverougla. Zatim se iz ta
č
aka
b
' i
c
' povuku pravci
paralelni sa štapovima 4 i 5 koji u presjeku definišu ta
č
ku
d
'. Time je
konstrukcija zatvorenog
č
etverougla, odnosno razlaganje sile
d
R
F
G
na tri
246
STATIKA
komponente
4
u
F
G
,
5
u
F
G
i
6
u
F
G
, završena. Dakle, spoljašnje sile su u
ravnoteži sa unutrašnjim silama presje
č
enih štapova. Da bi poligon sila
bio zatvoren smjer sila odre
đ
uje se kretanjem u krug koji uslovljava
smjer poznate sile, u ovom slu
č
aju sile
d
R
F
G
, kako je prikazano na slici
6.10c. Sa iste slike može da se, uz usvojenu razmjeru za silu, odredi
intenzitet sila
4
u
F
G
,
5
u
F
G
i
6
u
F
G
. Dobijeni smjerovi sila prenose se na
štapove dijela rešetkastog nosa
č
a desno od presjeka p-p, koji smo
posmatrali, na osnovu
č
ega možemo zaklju
č
iti kakav je karakter
optere
ć
enja štapova. Prema smjerovima sila
4
u
F
G
,
5
u
F
G
i
6
u
F
G
zaklju
č
ujemo da je štap 4 napregnut na pritisak, a štapovi 5 i 6 na
zatezanje. Na slici 6.10a isprekidanom linijom sa strelicom definisana je
reakcija štapa 4 koja slijedi iz
č
etverougla sila (slika 6.10c) i ima
suprotan smjer od pretpostavljenog. Porede
ć
i rezultate ove metode sa
metodom izrezivanja
č
vorova i Kremoninom metodom možemo uo
č
iti da
su rezultati identi
č
ni.
Analiziraju
ć
i izloženi postupak vidi se da Kulmanov metod odre
đ
ivanja
sila u štapovima rešetkastog nosa
č
a podrazumijeva razlaganje jedne sile
u tri nekolinearna pravca koji leže u jednoj ravni (komplanarni su), tako
da se može konstruisati zatvoreni
č
etvorougao sila. Dalje je uo
č
ljivo da
osnovu Kulmanove metode
č
ini Kulmanova prava i zbog toga je važno
da se u svakom konkretnom zadatku ta prava ta
č
no odredi. Kulmanova
prava K odre
đ
ena je ta
č
kama
M
i
N
. Ta
č
ka
M
se uvijek dobije tako što
biramo jedan pravac sile u štapu koji
ć
e presje
ć
i napadnu liniju
rezultante spoljašnjih sila. Pri tome preostala dva pravca sila u
štapovima (ili štapovi) ne smiju biti paralelni, ve
ć
se moraju sje
ć
i, na
osnovu
č
ega dobijamo ta
č
ku
N
. Prednost ove metode je u tome da se
mogu odrediti sile u pojedinim štapovima rešetkastog nosa
č
a, a da se
pri tome ne moraju odrediti sile u prethodnim štapovima. Me
đ
utim, ako
je potrebno odrediti sile u svim štapovima rešetkastog nosa
č
a ovaj
metod postaje veoma složen.
Potrebno je ista
ć
i i poseban slu
č
aj koji je karakteristi
č
an kako za ovaj
metod tako i za sve ostale metode. To je slu
č
aj štapa koji pripada
č
voru
koji nije optere
ć
en spoljašnjim silama, a osim posmatranog štapa u
č
voru se sjeku još dva štapa istih pravaca. Tada je sila u tom štapu
jednaka nuli i taj štap se naziva nultim štapom.
6.3.4. Riterova metoda
Uopšteno gledaju
ć
i, unutrašnje sile u štapovima mogu se odrediti na
dva na
č
ina:
1. metodom
č
vorova
(metoda izrezivanja
č
vorova i Kremonina metoda)
2. metodom presjeka
(Kulmanova i Riterova metoda).

248
STATIKA
usmjerenje strelice od
č
vora II, vidimo da je štap 4 napregnut na
pritisak.
Da bi odredili intezitet i karakter sile
5
u
F
G
, u štapu 5, uzet
ć
emo kao
momentnu ta
č
ku
č
vor V na osnovu
č
ega slijedi jedna
č
ina:
+
{
∑
M
V
= 0
F
2
⋅
a
+
F
u
4
⋅
a
+
F
u
5
(sin 45
0
+ cos 45
0
)
⋅
a = 0 ...............................(6.33)
Za date i izra
č
unate broj
č
ane vrijednosti dobijamo da je
F
u
5
= 3,54 kN.
Rezultat je dobijen sa pozitivnim predznakom, što zna
č
i da je smjer
reakcije štapa 5 pravilno pretpostavljen. Uzevši u obzir smjer reakcije
štapa 5 vidimo da je štap 5 napregnut na zatezanje.
Na ovaj na
č
in u potpunosti je odre
đ
en intezitet, pravac i smjer sila u
štapovima 4, 5 i 6 na osnovu presjeka p-p, odnosno Riterove metode.
O
č
igledno je da su vrijednosti ovih sila identi
č
ne sa vrijednostima
dobijenim metodom izrezivanja
č
vorova, Kremoninom i Kulmanovom
metodom.
I za Riterovu metodu je karakteristi
č
no da je primjenjujemo kada želimo
odrediti sile u najviše tri štapa rešetkastog nosa
č
a,
č
ime je ujedno
definisan izbor presjeka p-p. Za razliku od Kulmanove, ova metoda je
grafoanaliti
č
ka pri
č
emu se grafi
č
ki postupak ove metode svodi na
eventualno definisanje kraka sile, u odnosu na momentnu ta
č
ku,
mjerenjem sa slike, nacrtane u odgovaraju
ć
oj razmjeri za dužinu U
L
.
Za Riterovu metodu karakteristi
č
no je i to da smo momentnu ta
č
ku
mogli birati bilo gdje u ravni djelovanja posmatranih sila na izdvojenom
dijelu rešetkastog nosa
č
a, a to zna
č
i i lijevo i desno od presjeka p-p.
Druga karakteristika je ta da, pošto se radi o proizvoljnom ravnom
sistemu sila, unutrašnje sile u štapovima možemo da odredimo ne samo
pomo
ć
u tri momentne jedna
č
ine ve
ć
uopšteno postavljanjem analiti
č
kih
uslova ravnoteže proizvoljnog ravnog sistema sila. To zna
č
i možemo
formirati sistem jedna
č
ina koji glasi:
∑
M
= 0...........................................................................................(6.34)
∑
X
= 0 ..........................................................................................(6.35)
∑
Y
= 0............................................................................................(6.36)
Ili sistem jedna
č
ina koji se sastoji od dvije momentne jedna
č
ine i jedne
od jedna
č
ina
∑
X
= 0 ili
∑
Y
= 0 .
Tre
ć
a karakteristika je da ako se spoljašnje sile, lijevo ili desno od
presjeka, svode na spreg njihova rezultanta je jednaka nuli, što zna
č
i da
se i sile u presje
č
nim štapovima moraju svesti na spreg istog momenta
ali suprotnog smjera, kako bi rešetkasti nosa
č
bio u ravnoteži.
249
6-REŠETKASTI NOSA
Č
I
Na kraju je potrebno ista
ć
i da postoje i izvjesni specijalni rešetkasti
nosa
č
i kod kojih je zadovoljen uslov izme
đ
u broja štapova i
č
vorova ali
se ne može nacrtati Kremonin plan sila niti se može koristiti Riterova
metoda. U takvim slu
č
ajevima stati
č
ki odre
đ
enih rešetkastih nosa
č
a
primjenjuje se metoda zamjene štapova ili Henebergova metoda.
Tako
đ
er treba ista
ć
i da posebnu vrstu specijalnih rešetkastih nosa
č
a
predstavljaju Gerberovi rešetkasti nosa
č
i sa jednim ili više zglobova, koji
nisu predmet izu
č
avanja ovog kursa ali
č
itaoca upu
ć
ujemo na literaturu
iz ove oblasti datu u okviru spiska korištene literature na kraju knjige.
Primjeri
Zadatak 6.1
. Odrediti sile u štapovima rešetke u
č
ijim
č
vorovima
djeluju dvije sile
1
2 kN
F
=
i
2
1,5 kN
F
=
analiti
č
ki metodom
č
vorova.
Slika 6.11.
Rješenje:
Otpori oslonaca:
2
0
0
B
X
X
F
= ⇒
−
=
∑
................................................................... (1)
1
0
0
A
B
Y
F
Y
F
= ⇒
+
−
=
∑
.............................................................. (2)
2
1
0
4
1
2 0
A
B
M
Y
F
F
= ⇒
⋅ +
⋅ −
⋅ =
∑
................................................ (3)
iz (1):
2
1,5 kN
B
X
F
=
=
iz (3):
1
2
2
1
2 2 1,5 1
0,625 kN
4
4
B
F
F
Y
⋅ −
⋅
⋅ −
⋅
=
=
=
iz (2):
1
2 0,625 1,375 kN
A
B
F
F
Y
=
−
= −
=

251
6-REŠETKASTI NOSA
Č
I
iz (4):
2
1
cos 45
S
S
=
⋅
°
=1,375 kN
Č
vor II
1
3
4
cos 45
cos 45
cos 45
0
X
S
S
S
=
⋅
° −
⋅
° −
⋅
° =
∑
.............................. (6)
1
3
4
sin 45
sin 45
cos 45
0
Y
S
S
S
=
⋅
° +
⋅
° −
⋅
° =
∑
................................ (7)
Ako podijelimo (6) sa cos 45° i (7) sa sin 45°:
1
3
4
0
S
S
S
−
−
=
.............................................................................. (8)
1
3
4
0
S
S
S
+
−
=
.............................................................................. (9)
Sabiranjem jedna
č
ina (8) i (9) dobijamo:
1
4
4
1
2
2
0
1,945 kN
S
S
S
S
⋅
− ⋅
= ⇒
=
=
iz(8):
3
4
1
0
S
S
S
=
−
=
Č
vor IV
4
6
cos 45
cos 45
0
X
S
S
=
⋅
° −
⋅
° =
∑
................................................. (10)
4
5
6
1
sin 45
sin 45
0
Y
S
S
S
F
=
⋅
° −
+
⋅
° −
=
∑
...................................... (11)
iz (10):
6
4
1,945 kN
S
S
=
=
iz (11):
5
4
6
1
sin 45
sin 45
0,75 kN
S
S
S
F
=
⋅
° +
⋅
° −
=
Č
vor III:
2
3
7
8
cos 45
cos 45
0
X
S
S
S
S
= −
+
⋅
° −
⋅
° +
=
∑
.................................. (12)
3
5
7
sin 45
sin 45
0
Y
S
S
S
= −
⋅
° +
−
⋅
° =
∑
.......................................... (13)
iz (13):
3
5
3
5
7
0
sin 45
1,061kN
sin 45
sin 45
S
S
S
S
S
=
−
⋅
°
=
=
°
°
=
iz (12):
8
2
3
7
cos 45
cos 45
S
S
S
S
=
−
⋅
° +
⋅
° =
2,125 kN
Č
vor V:
7
6
2
9
cos 45
cos 45
cos 45
0
X
S
S
F
S
=
⋅
° +
⋅
° −
−
⋅
° =
∑
....................... (14)
7
6
9
sin 45
sin 45
sin 45
0
Y
S
S
S
=
⋅
° −
⋅
° +
⋅
° =
∑
................................ (15)
iz (15):
9
6
7
S
S
S
=
−
=0,884 kN
Č
vor VI (provjera):
9
8
cos 45
0
B
X
S
S
X
=
⋅
° −
+
=
∑
9
9
sin 45
0
B
Y
S
Y
= −
⋅
° +
=
∑
9
252
STATIKA
Zadatak 2.
Za rešetkastu
konstrukciju krana
odrediti:
a)
grafi
č
ki i analiti
č
ki
reakcije u osloncima A
i B
b)
pomo
ć
u Kulmanove i
Riterove metode
odrediti veli
č
inu i
karakter sila u
štapovima 4, 5 i 6.
Rješenje:
1
2
0
A
B
Y
F
F
F
F
Q
=
+
−
−
−
=
∑
......................................................................................................(1)
2
3
3
6 0
A
B
M
F
F
Q
=
⋅ −
⋅ − ⋅ =
∑
.......................................................(2)
iz (2):
2
3
6
3
B
F
Q
F
⋅ +
⋅
=
=
9 kN
iz (1):
1
2
A
B
F
F
F
Q F
=
+
+
−
=
3 kN
slika 6.15
slika 6.14
254
STATIKA
iz (2):
6
60 kN
3
B
Q
F
⋅
=
=
iz (1):
30 kN
A
B
F
F
Q
=
−
=
slika 6.17
b) sile u štapovima
slika 6.18
Na osnovu slike slijedi:
6
arctg
63,435
3
CBE
α
Δ
⇒
=
=
°
,
90
26,565
β
α
=
° − =
°
255
6-REŠETKASTI NOSA
Č
I
CDF
Δ
⇒
6 3
arctg
33,69
3 1,5
γ
−
=
=
°
+
Č
vor I
1
2
cos
sin
0
X
S
S
γ
β
= −
+
=
∑
......................................................... (4)
1
2
sin
cos
0
Y
S
S
Q
γ
β
= −
+
−
=
∑
.................................................... (5)
Ovaj sistem od dvije jedna
č
ine rješi
ć
emo metodom eliminacije:
1
2
sin
cos
sin
0
cos
S
S
γ
γ
β
γ
−
+
=
⋅ −
1
2
1
2
sin
sin
tg
0
sin
cos
0
S
S
S
S
Q
γ
β
γ
γ
β
−
⋅
⋅
=
−
+
−
=
+
2
2
cos
sin
tg
0
S
Q S
β
β
γ
−
−
⋅
⋅
=
2
50,311kN
cos
sin
tg
Q
S
β
β
γ
=
=
−
⋅
iz (4):
1
2
sin
27,041kN
cos
S
S
β
γ
=
=
Č
vor III
3
2
4
cos
cos
0
X
S
S
S
α
α
=
−
+
=
∑
.................................................... (6)
3
2
sin
sin
0
B
Y
S
S
F
α
α
= −
−
+
=
∑
................................................... (7)
iz (7):
2
3
sin
16,771kN
sin
B
F
S
S
α
α
−
=
=
iz (6):
4
2
3
cos
cos
15 kN
S
S
S
α
α
=
−
=
Č
vor II
1
3
5
cos
sin
sin
0
X
S
S
S
γ
β
β
=
−
−
=
∑
............................................. (8)
1
3
5
sin
cos
cos
0
Y
S
S
S
γ
β
β
=
+
−
=
∑
............................................. (9)
iz (8):
1
3
5
cos
sin
33,539 kN
sin
S
S
S
γ
β
β
−
=
=
Č
vor IV (Provjera)
4
5
cos
0
X
S
S
α
= −
+
=
∑
9
............................................................. (10)
5
sin
0
A
Y
S
F
α
=
−
=
∑
9
................................................................ (11)

257
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
−
Kod relativnog pomjeranja jednog tijela pod drugom, na dodirnoj
površini nastaje sila trenja
F
μ
G
,
č
iji se intenzitet mijenja od nule do
grani
č
ne sile trenja klizanja (
gr
F
G
)
F
μ
max
=
F
gr
=
μ
o
N
........................................................................... (7.1)
−
Sila trenja klizanja
F
μ
G
ima pravac tangente na površinu u mjestu
dodira dva tijela, a usmjerena je u suprotnu stranu od aktivne sile.
−
Intenzitet sile trenja klizanja ne zavisi od veli
č
ine dodirne površine
(misli se na dovoljno velike površine).
Prema slici 7.1b, sila potrebna za pomjeranje tijela je:
s
gr
F
F
=
G
G
......................................................................................... (7.2)
Kako je
N
G
=
G
G
, to je;
F
gr
=
μ
o
⋅
N
=
F
s
.............................................................................. (7.3)
gdje je:
F
s
– smi
č
u
ć
a sila,
F
gr
– grani
č
na sila
μ
o
– stati
č
ki koeficijent trenja
s
s
o
F
F
N
G
μ
=
=
................................................................................. (7.4)
U grani
č
nom slu
č
aju mora biti zadovoljen uslov da je:
F
μ
≤
μ
o
N
........................................................................................ (7.5)
Stati
č
ki koeficijent trenja možemo eksperimentalno odrediti na dosta
jednostavan na
č
in kako je prikazano na slici 7.2.
Slika 7.2 Eksperimentalno odre
đ
ivanje stati
č
kog
koeficijenta trenja klizanja
258
STATIKA
Odabrano tijelo težine
G
G
postavi se na strmu ravan
č
iji se ugao nagiba
može mijenjati. Ugao nagiba strme ravni
α
, pove
ć
ava se sve dotle dok se
tijelo ne po
č
ne pomjerati niz strmu ravan. Tada je vrijednost stati
č
kog
koeficijenta trenja
η
o
definisano tangensom ugla nagiba strme ravni
μ
o
= tg
α
.........................................................................................(7.6)
Dokaz:
Iz uslova ravnoteže tijela na strmoj ravni proizilazi:
1
sin
0
n
xi
i
F
G
F
μ
α
=
=
−
=
∑
..................................................................(7.7)
1
cos
0
n
yi
i
F
N G
α
=
=
−
=
∑
...................................................................(7.8)
Proizilazi da je:
F
μ
=
G
sin
α
....................................................................................(7.9)
N
=
G
cos
α
...................................................................................(7.10)
Od ranije je poznato da je:
F
μ
=
N
⋅
μ
o
.......................................................................................(7.11)
Uvrštavanjem izraza (7.9) i (7.10) u izraz (7.11) dobivamo:
G
sin
α
=
G
cos
α
μ
o
......................................................................(7.12)
sin
tg
cos
o
α
μ
α
α
=
=
...........................................................................(7.13)
Vrijednost koeficijenta trenja zavisi od vrste materijala dodirnih
površina. Tako na primjer za:
−
č
elik po
č
eliku
μ
o
= 0,15
−
č
elik po ledu
μ
o
= 0,027, itd.
Reakcija veze koja nije idealna – hrapave veze
R
G
, sastoji se od dvije
komponente: normalne komponente
N
G
i komponente suprotne od
smjera kretanja
F
μ
G
- tangencijalna komponenta
R
N
F
μ
=
+
G
G
G
....................................................................................(7.14)
gdje je:
N
G
- normalna komponenta
F
μ
G
- tangencijalna komponenta – sila trenja klizanja
R
G
- ukupna reakcija hrapave podloge, slika 7.3.

260
STATIKA
7.2 Trenje kotrljanja
Trenje kotrljanja izražava se kao otpor pri kotrljanju tijela po površini,
odnosno pri kotrljanju jednog tijela po površini drugog tijela.
Na slici 7.5 prikazano je kotrljanje diska po ravnoj nedeformabilnoj
površini.
Slika 7.5 Kotrljanje diska po ravnoj nedeformabilnoj poršini
Neka dužinama lukova
1 1
1 2
A B i B B
odgovaraju dužine rastojanja
1 1
1 2
A C i C C
. Ako je zadovoljen ovaj uslov, a pri kotrljanju diska po
površini dolazi do poklapanja ta
č
aka
B
1
i
C
1
, odnosno
B
2
i
C
2
, tada
imamo kotrljanje bez klizanja, a ako ovaj uslov nije ispunjen ima
ć
emo
kotrljanje sa klizanjem.
Slika 7.6 Kotrljanje diska po ravnoj deformabilnoj poršini
Na slici 7.6 prikazan je disk koji se kotrlja po deformabilnoj podlozi.
Disk
ć
e ostati u stanju mirovanja sve dok sila
F
H
ne dostigne grani
č
nu
vrijednost koja ovisi i od osobina materijala diska i podloge. Da bi se
nastavilo kretanje diska potrebno je da sila
F
H
bude ve
ć
a od grani
č
ne
sile
gr
F
H
:
261
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
F
H
>
gr
F
H
........................................................................................ (7.20)
U ovom slu
č
aju na disk pored aktivnih sila djeluje i reakcija veze
definisana kao rezultanta normalne komponente i sile trenja.
Nepoznate komponente sila mogu se odrediti iz uslova ravnoteže:
1
cos
0,
n
xi
i
F
F
F
μ
α
=
=
−
=
∑
................................................................. (7.21)
1
sin
0
n
yi
i
F
N
F
G
α
=
=
+
−
=
∑
............................................................. (7.22)
1
cos
0
i
n
F
A
i
M
N h F R
α
=
=
⋅ − ⋅
=
∑
........................................................ (7.23)
(Rastojanje izme
đ
u ta
č
ke
A
i sile trenja je malo pa se moment sile trenja
može zanemariti).
gdje je:
N – normalna komponenta reakcije veze
F
μ
- tangencijalna komponenta reakcije veze, a još se naziva
i sila trenja pri klizanju (F
μ
≤
μ
o
N).
Iz izraza (7.21) i (7.22) proizilazi da je:
F
μ
=
F
cos
α
.................................................................................. (7.24)
N
=
G
–
F
sin
α
.............................................................................. (7.25)
a iz posljednje jedna
č
ine (7.23) proizilazi da je:
N
⋅
h
=
F
⋅
R
⋅
cos
α
,........................................................................ (7.26)
M
T
=
F
⋅
R
⋅
cos
α
,......................................................................... (7.27)
gdje je:
M
T
=
N
⋅
h
– moment sprega trenja kotrljanja, odnosno
F
⋅
R
⋅
cos
α
=
M
T
i ova dva momenta se uravnotežavaju.
Utvr
đ
eno je da se sa pove
ć
anjem sile
F
G
, pove
ć
ava i rastojanje
f
=
h
, a
time se pove
ć
ava i moment trenja kotrljanja, ali samo do grani
č
ne
vrijednosti:
M
T
=
N
⋅
h
=
N
⋅
f
≤
M
T
max
, odnosno............................................ (7.28)
f
≤
f
max
, a
f
max
=
f
gr
, ..................................................................... (7.29)
gdje je:
f
– koeficijent trenja kotrljanja
[
cm
]
,
za slu
č
aj
Č
/
Č
→
f
= 0,005 cm.
Na osnovu prethodno izloženog slijedi da je:
M
T
=
N
⋅
f
≤
F
⋅
R
⋅
cos
α
. .............................................................. (7.30)

263
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
Slika 7.8 Ilustracija užetnog trenja
Odnos izme
đ
u sile
F
G
i
Q
G
postavio je Ojler, a pošao je od osnovnih
pretpostavki datih na slici 7.8.
Kod izu
č
avanja ovog zadatka pošlo se od pretpostavke da je pritisak
užeta na cilindar ravnomjerno raspore
đ
en po cijeloj površini nalijeganja
užeta.
Izdvojimo elementarnu dužinu užeta
CD dl
Rd
θ
=
=
, na
č
ijim krajevima
djeluju sile
F
μ
G
i
F
μ
G
+
d F
μ
G
. Razlika ovih sila uravnotežena je silom
trenja:
dF
T
=
dF
μ
=
μ
o
dN
........................................................................... (7.33)
Za postavljeni koordinatni sistem u ta
č
ki O
1
, uslovi ravnoteže definisani
su slijede
ć
im izrazima:
μ
μ
μ
θ
θ
=
+
−
−
=
∑
(
)cos
cos
0
2
2
xi
T
d
d
F
F
dF
F
dF
................................ (7.34)
odnosno za osu
y
je:
sin
(
)sin
0.
2
2
yi
d
d
F
dN
F
F
dF
μ
μ
μ
θ
θ
=
−
−
+
=
∑
................................. (7.35)
Kako je
d
θ
- mali ugao to je cos
1, sin
.
2
2
2
d
d
d
θ
θ
θ
=
=
Na osnovu ovih izraza proizilazi da je:
dN
=
F
μ
d
θ
..................................................................................... (7.36)
T
264
STATIKA
pri
č
emu je veli
č
ina
2
d
dF
μ
θ
zanemarena kao mala veli
č
ina višeg reda.
Uvrštavanjem izraza (7.36) u izraz (7.33) dobiva se:
dF
μ
=
μ
o
dN
=
μ
o
F
μ
d
θ
....................................................................(7.37)
ili
o
dF
d
F
μ
μ
μ
θ
=
...................................................................................(7.38)
odnosno:
,
Q
o
F
o
dF
d
F
ϕ
μ
μ
μ
θ
=
∫
∫
..........................................................................(7.39)
ln
Q
o
F
o
F
ϕ
μ
μ θ
=
............................................................................(7.40)
i kona
č
no:
o
F
Q e
μ ϕ
−
=
....................................................................................(7.41)
Prema tome odnos izme
đ
u sila na lijevom i desnom kraju užeta
definisan je izrazom:
o
F
e
Q
μ ϕ
−
=
.......................................................................................(7.42)

266
STATIKA
F'
u
= 1,2 kN
- Doboš i to
č
ak
Slika 2.11 Doboš ko
č
nice oslobo
đ
en veza
Stati
č
ki uslovi ravnoteže doboša i to
č
ka, za usvojeni koordinatni sistem
x
O
y
, definisani su jedna
č
inama:
∑
X
= 0
X
o
–
F'
c
= 0 .....................................................................................(c)
∑
Y
= 0
Y
o
–
F
u
–
F
D
= 0...............................................................................(d)
∑
M
o
= 0
F
D
⋅
R
–
F
C
'
⋅
R
+
F
u
⋅
r
= 0................................................................(e)
Dopunske jedna
č
ine glase:
F
u
= F'
u
..........................................................................................(f)
F
C
' = F
D
e
μϕ
....................................................................................(g)
0
0
3
270
270
(rad)
(rad) 4,71239 (rad)
180
2
π
π
ϕ
=
=
=
=
Uvrštavanjem jedna
č
ina (f) i (g) u jedna
č
inu (e) dobijamo:
F
D
⋅
R
–
F
D
e
μϕ
⋅
R
+
F'
u
⋅
r
= 0 .........................................................(h)
odnosno:
'
(
1)
u
D
F r
F
e
R
μϕ
⋅
=
−
..............................................................................(h')
Uvrštavaju
ć
i broj
č
ane podatke slijedi:
267
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
Slika 7.12 Ru
č
ica
oslobo
đ
ena veza
0,3 4,71239
1,2 0,1
(
1)0,3
D
F
e
⋅
⋅
=
−
= 0,129 kN
Na osnovu jedna
č
ina (g), (c) i (d) dobijamo:
F
C
'
= 0,129
⋅
e
0,3
⋅
4,71239
= 0,530 kN
X
o
=
F'
c
.......................................................................................... (c')
X
o
= 0,530 kN
Y
o
=
F
u
+
F
D
=
F'
u
+
F
D...................................................................................................................
(i)
Y
o
= 1,2 + 0,129 = 1,329 kN
Intezitet i pravac reakcije u osloncu O definisani su izrazima:
2
2
o
o
o
F
X
Y
=
+
............................................................................... (j)
2
2
0,53
1,329
o
F
=
+
= 1,431 kN
tg
o
o
Y
X
α
=
...................................................................................... (k)
arc tg
o
o
Y
X
α
=
................................................................................. (l)
1,329
arc tg
0,53
α
=
= 68,26
0
ili
α
= 68
0
15'36"
- Ru
č
ica AB
Stati
č
ki uslovi ravnoteže, za usvojeni koordinatni
sistem
xO
2
y
, ru
č
ice
AB
definisani su jedna
č
inama:
∑
X
= 0
F
C
– F
K
– X
B
= 0
(m)
∑
Y
= 0
Y
B
= 0
(n)
∑
M
B
= 0
F
K
⋅
(a+b) – F
C
⋅
b = 0
(o)
Dopunska jedna
č
ina glasi:
F
C
=
F'
C
(p)
Iz jedna
č
ine (o), a na osnovu jedna
č
ine (p) slijedi:
'
(
)
(
)
K
C
C
b
b
F
F
F
a b
a b
=
=
+
+
............................................................. (r)
0,15
0,530
(0,45 0,15)
K
F
=
+
= 0,1325 kN

269
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
Slika 7.14 Sistem oslobo
đ
en veza i razložen na tri podsistema
Uslovi stati
č
ke ravnoteže podsistema definisani su jedna
č
inama:
a) teret A
∑
X
= 0
F
1
–
F
T
–
G
A
sin
α
= 0 ..................................................................... (a)
∑
Y
= 0
F
N
-
G
A
cos
α
= 0............................................................................ (b)
F
T
=
μ
1
F
N
...................................................................................... (c)
b) kotur C
F
1
=
F
1
' .......................................................................................... (d)
Kako se na koturu
C
javlja užetno trenje primjenit
ć
emo Ojlerovu (
Euler
)
jedna
č
inu koja u ovom slu
č
aju, s obzirom da se teret
A
kre
ć
e uz kosu
ravan i da je
F
2
>
F
1
', glasi:
2
2
'
2
1
1
F
F e
F e
μ β
μ β
=
⋅
=
..................................................................... (e)
c) teret B
∑
X
= 0
G
B
cos 270
0
+
F
2
' cos 90
0
= 0 ......................................................... (f)
0 = 0
∑
Y
= 0
F
2
' –
G
B
= 0 .................................................................................... (g)
F
2
' =
F
2
.......................................................................................... (h)
270
STATIKA
Iz jedna
č
ine (g) slijedi:
F
2
'=
G
B
..........................................................................................(g')
a na osnovu jedna
č
ine (h) dobijamo:
F
2
' =
F
2
=
G
B
..................................................................................(i)
odnosno:
F
2
=
F
2
' = 10 kN
Iz jedna
č
ine (e) dobijamo:
F
1
=
F
1
' =
F
2
e
-
μβ
......................................................................................................................
(j)
odnosno:
F
1
=
F
1
' = 10
⋅
e
-0,2
⋅
2,0944
= 6,58 kN
Ugao
β
uvrštavamo u radijanima, odnosno:
β
= 120
0
⋅
0
180
π
rad = 2,0944 rad
Ako jedna
č
inu (c) uvrstimo u jedna
č
inu (a) slijedi:
F
1
-
μ
1
F
N
–
G
A
sin
α
= 0..................................................................(k)
Iz jedna
č
ine (b) slijedi:
F
N
=
G
A
cos
α
................................................................................(b')
što uvršteno u jedna
č
inu (k) daje:
F
1
-
μ
1
G
A
cos
α
-
G
A
sin
α
= 0.........................................................(l)
odnosno:
1
1
( cos
sin )
A
F
G
μ
α
α
=
+
.....................................................................(l')
Dakle težina tereta A iznosi:
6,58
(0,25 0,86603 0,5)
9,18 kN.
A
A
G
G
=
⋅
+
=

272
STATIKA
0
0
sin
0
O
M
G x
T r
F r
α
=
⋅
− ⋅ + ⋅ ⋅
=
∑
.........................................(c)
Dodatni uslov:
T=
N
μ
⋅
..........................................................................................(d)
Veli
č
ine
x
o
i
y
o
sa slike 7.16 su (položaj težišta polukruga):
4
sin
3
4
cos
3
o
o
r
x
r
y
α
π
α
π
=
=
.................................................................................(e)
Iz (a), (b) i (d) slijedi da je
F = T =
μ⋅
N =
μ⋅
G
Jedan
č
ina (c) sa izrazima (a), (b), (d) i (e) postaje:
4
sin
sin
0
3
3
sin
4 3
r
G
G
r G
r
α
μ
μ
α
πμ
α
πμ
−
⋅ +
⋅
=
=
+
⋅
⋅
Zadatak 7.4
Na vertikalni zid prislonjene su ljestve AB. Koeficijent
trenja na vertikalnom zidu je
μ
1
, a na podu je
μ
2
. Težina ljestava i
č
ovjeka skoncentrisana je u ta
č
ki C i dijeli dužinu ljestava u odnosu
m:n. Odrediti:
a) Najve
ć
i ugao
α
pod kojim
ć
e ljestve biti u ravnoteži,
b) Veli
č
ine reakcija u osloncima A i B.
Slika 7.17 Ljestve AB
273
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
Rješenje:
Ljestve AB posmatrat
ć
e se u ravnotežnom položaju (slika 7.18) Na
mjestu kontakta sa podlogom javljaju se normalne sile i sile trenja.
Slika 7.18 Ljestve u položaju ravnoteže
Uslovi ravnoteže ljestava su:
2
0
0
A
B
X
N
N
μ
=
−
⋅
=
∑
............................................................ (a)
1
0
0
A
B
Y
N
F
N
μ
=
⋅
−
+
=
∑
........................................................ (b)
Iz (a) slijedi:
N
A
=
μ
2
⋅
N
B
....................................................................................... (a')
Kada se (a') uvrsti u (b) dobiva se:
1
2
0
B
B
N
F
N
μ μ
⋅
⋅
−
+
=
.................................................................. (b')
1
2
2
1
2
1
1
B
A
F
N
F
N
μ μ
μ
μ μ
=
+
⋅
⋅
=
+
⋅
Tre
ć
i uslov ravnoteže, da je moment svih sila za proizvoljnu ta
č
ku ravni
jednak nuli, daje:

275
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
B
C
N
N
Q
=
=
................................................................................. (d)
Sila trenja T zavisi od normalne reakcije
N=Q
i koeficijenta trenja
μ
:
T
Q
μ
= ⋅
........................................................................................ (e)
Slika 7.20 Sistem cilindri
č
nih tijela u stanju
ravnoteže
Uslovi ravnoteže polucilindra B (prikazanog na slici 7.21 ) su:
Slika 7.21 Ravnotežni položaj cilindra B
0
cos
0
X
T
N
α
=
−
=
∑
.............................................................. (f)
0
sin
0
2
B
Q
Y
N
N
α
=
−
−
=
∑
...................................................... (g)
Iz (f) i (e) slijedi da je:
276
STATIKA
N
⋅
cos
α
=
μ
⋅
Q
...............................................................................(e')
Iz (g) i (d) slijedi da je:
N
⋅
sin
α
=
Q
/2................................................................................(h)
Dijeljenjem prethodne dvije jedna
č
ine dobija se:
1
2
tg
α
μ
=
.......................................................................................(i)
2
1
cos
1
tg
α
α
=
+
...........................................................................(j)
Uvrštavanjem (i) u (j) dobiva se:
2
2
cos
1 4
μ
α
μ
=
+
............................................................................(k)
odnosno rastajanje
x
izme
đ
u cilindara je:
2
8
4 cos
1 4
r
x
r
μ
α
μ
=
⋅
=
+
Zadatak 7.6
Na strmoj ravni pod uglom
ϕ
leži blok težine
G
1
=200 N, a
na njemu drugi težine
G
2
=70 N kojeg pridržava uže koje je paralelno sa
kosinom. Trenje izme
đ
u blokova, te izme
đ
u bloka
G
1
i kosine je
μ
=0,3.
Odrediti najmanji ugao
ϕ
kosine pri kojem
ć
e do
ć
i do klizanja bloka
G
1
i
silu u užetu
S
(slika 7.22).
Slika 7.22 Blokovi težina G
1
i G
2
Rješenje:
Blokove
ć
emo me
đ
usobno rastaviti i posmatrat
ć
emo ravnotežu svakog
bloka posebno.

278
STATIKA
(
)
1
1
1
2
cos
T
N
G
G
μ
μ
ϕ
=
= ⋅
+
............................................................(g')
Kada se izrazi za
T
1
i
T
2
, u funkciji ugla
ϕ
, uvrste u jedna
č
inu (e) dobiva
se jedna
č
ina samo sa nepoznatom
ϕ
iz koje se odredi ravnotežni ugao:
(
)
1
1
2
2
sin
cos
cos
0
G
G
G
G
ϕ μ
ϕ
μ
ϕ
−
+
−
=
.........................................(e')
(
)
(
)
(
)
1
1
2
1
1
2
1
2
1
sin
cos
2
0 / : cos
2
0
2
0,3(200 2 70)
0,51
200
29
G
G
G
G tg
G
G
G
G
tg
G
tg
ϕ μ
ϕ
ϕ
ϕ μ
μ
ϕ
ϕ
ϕ
−
+
=
−
+
=
+
=
+ ⋅
=
=
=
°
Sila u užetu (a) je:
2
2
2
2
sin
sin
cos
70 sin29
0,3 70 cos 29
52,3
S G
T
G
G
S
N
ϕ
ϕ μ
ϕ
=
+
=
+
=
⋅
° +
⋅
⋅
°
=
Zadatak 7.7
Tereti
G
1
i
G
2
su povezani užetom preko kotura K.
Izra
č
unaj silu
F
koja je paralelna sa kosinom, koja je potrebna da se
ostvari kretanje tereta niz kosinu (
G
2
dolje,
G
1
gore).
Zadano je:
G
1
=10 N,
G
2
=20 N,
α
=30
°
,
μ
1
=0,1 i
μ
2
=0,2.
Slika 7.24 Tereti G
1
i G
2
na strmoj ravni
Rješenje:
Posmatrat
ć
e se ravnoteža svakog tereta posebno. Smjer kretanja
definiše smjer sila trenja koje djeluju na terete. Smjer sila
2
T
G
i
1
T
G
suprotan je od smjera kretanja tereta (slika 7.25).
279
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
Slika 7.25 Tereti G
1
i G
2
u ravnotežnom
položaju
Uslovi ravnoteže tereta G
1
:
1
1
0
sin
0
X
S T
G
α
=
−
−
=
∑
........................................................ (a)
1
1
0
cos
0
Y
N
G
α
=
−
=
∑
............................................................ (b)
1
1 1
1 1
cos
T
N
G
μ
μ
α
=
=
..................................................................... (c)
Uslovi ravnoteže tereta G
2
:
2
2
0
sin
0
X
S T
F G
α
=
+
−
−
=
∑
.................................................. (d)
2
2
0
cos
0
Y
N
G
α
=
−
=
∑
............................................................ (e)
2
2 2
2 2
cos
T
N
G
μ
μ
α
=
=
................................................................... (f)
Iz jedna
č
ina (a) i (c) izrazi se sila u užetu
S
:
1 1
1
cos
sin
0
S
G
G
μ
α
α
−
−
=
1
1
( cos
sin )
S G
μ
α
α
=
+
.................................................................... (g)
Iz jedna
č
ina (d) i (f) izrazi se sila u užetu
S
:
2 2
2
cos
sin
0
S
G
F G
μ
α
α
+
−
−
=
2
2
(sin
cos )
S
F G
α μ
α
=
+
−
............................................................. (h)
Oba izraza za silu
S
(h i g) se izjedna
č
e i dobije se izraz za silu
F
:
μ
α
α
α μ
α
+
=
+
−
1
1
2
2
( cos
sin )
(sin
cos )
G
F G
1
1
2
2
( cos
sin )
(sin
cos )
F
G
G
μ
α
α
α μ
α
=
+
+
−
..................................... (i)
Nakon uvrštavanja zadanih vrijednosti, sila
F
iznosi:

281
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
0
cos 30
0
B
Y
N G
=
−
° =
∑
......................................................... (b)
T
N
μ
= ⋅
....................................................................................... (c)
Iz jedna
č
ine (b) slijedi da je:
N = G
B
⋅
cos30
°
............................................................................... (b')
a iz (c) da je:
T =
μ
G
B
⋅
cos30
°
............................................................................. (c')
Iz jedna
č
ine (a) kada se uvrsti (b’) i (c’) dobije se:
1
1
1
sin30
cos 30
(sin30
cos 30 )
3,5825 kN
B
B
B
S
G
G
S
G
S
μ
μ
=
° +
°
=
° +
°
=
Jedna
č
ina užetnog trenja na nepokretom koturu daje vezu izme
đ
u sila
S
1
i
S
2
pri
č
emu je
S
2
>
S
1
jer se teret kre
ć
e uz kosinu.
Obuhvatni ugao je:
β
=120
°
=2
π
/3
2
0,25
3
2
1
2
3,5825
6,045 kN
S
S e
e
S
π
μβ
⋅
=
=
⋅
=
Sila
S
2
jednaka je težini tereta
G
A
=6,045 kN.
Zadatak 7.9
Preko dvije nepomi
č
ne osovine sa centrima u O i O
1
preba
č
en je konopac o
č
ije su krajeve obješeni tereti G
1
i G pri
č
emu je
G>G
1
(G uravnotežuje sistem). Odrediti minimalnu vrijednost
koeficijenta trenja izme
đ
u osovina i konopca pri kojoj
ć
e se teret nalaziti
u ravnoteži.
Slika 7.28 Osovine sa užetima
282
STATIKA
Rješenje:
Posmatrat
ć
e se odnos izme
đ
u sila u užadima na svakoj od dvije osovine
(slika 7.29).
Slika 7.29 Ravnoteža sila u krajevima užeta
Jedna
č
ina užetnog trenja na lijevoj osovini je (
G>S
):
G = S
⋅
e
μ⋅
α
.....................................................................................(a)
Jedna
č
ina užetnog trenja na desnoj osovini je (
S’>G
1
):
S = G
1
⋅
e
μ⋅
α
....................................................................................(b)
Uvrštavanjem jedna
č
ine (b) u (a) dobije se:
G = G
1
⋅
e
2
μ⋅
α
..................................................................................(c)
2
1
1
1
1
3
2
2
ln
ln
ln
3
2
ln
ln
2
ln
ln
3
G
e
G
e
G
G
G
G
G
G
μ α
π
α
μα
π
μ
μ
π
⋅
=
=
=
−
=
−
−
=
Zadatak 7.10
Prizmati
č
no tijelo težine
Q
=10 kN nalazi se na kosini pod
uglom
β
=60
°
. Da bi se tijelo održalo u ravnoteži, koliko puta uže mora
biti omotano oko nepomi
č
nog hrapavog valjka A. Napetost užeta je
S
=100 N, koeficijent trenja na kosini i valjku
μ
1
=
μ
2
=0,25, ugao
α
=30
°
.

284
STATIKA
(
)
(
)
1
1
1
1
1
cos
sin
cos
sin
0
sin
cos
sin
cos
10000 sin60
cos 60
sin30
cos 30
7470 N
Q
S
S
Q
Q
S
S
S
μ
α μ
α
α
β
β μ
β
μ
α
α
μ
μ
+
+
−
=
−
=
+
° −
°
=
° +
°
=
Iz ravnoteže nepokretnog kotura slijedi da je S
1
>S (teret ima tendenciju
da se kre
ć
e niz strmu ravan).
1
S
Se
μ α
⋅
=
......................................................................................(d)
2
obuhvatni ugao
n
α
π
=
−
..............................................................(e)
2
1
S
S
n
e
μ π
⋅ ⋅
=
....................................................................................(d')
1
lnS
ln
n=
2
ln7470 ln100
2
0,25
2,75 puta
S
n
n
πμ
π
−
−
=
⋅
=
Uže treba biti omotano oko valjka 2,75 puta.
Zadatak 7.11
Pomo
ć
u ko
č
nice prema slici 7.32 spušta se jednoliko
teret
Q
=5 kN niz kosinu pod uglom
α
=60
°
.
Odrediti potrebnu silu
F
na kraju ko
č
nice, ako su zadane veli
č
ine:
r
= 20 cm
R
= 40 cm
a
=20 cm
b
= 100 cm
c
= 8 cm
Q
= 5 kN
μ
1
=0,1 na kosini
μ
2
=0,3 na ko
č
nici
Trenje kotura
č
e K zanemariti.
285
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
Slika 7.32 Ko
č
nica sa dobošem
Rješenje:
Ko
č
nica
ć
e se rastaviti na tri podsistema: teret
Q
, ko
č
ioni doboš i
ko
č
ionu polugu. Krenut
ć
e se od podsistema tereta
Q
jer nam je ta
vrijednost poznata.
Ravnoteža tereta Q (slika 7.33)
Slika 7.33 Ravnoteža tereta Q
0
sin60
0
X
S T Q
=
+ −
° =
∑
....................................................... (a)
0
cos 60
0
Y
N Q
=
−
° =
∑
........................................................... (b)
1
T
N
μ
=
......................................................................................... (c)
287
7-TRENJE KLIZANJA I TRENJE KOTRLJANJA
Ravnoteža poluge (slika 7.35)
Slika 7.35 Ravnoteža poluge
1
1
1
0
0
o
M
F b N a T c
=
⋅ −
⋅ +
=
∑
................................................... (f)
1
1
N a T c
F
b
−
=
................................................................................ (f')
1,1968 kN
F
=
X
01
Y
01
288
TEŽIŠTE
8.1 Koordinate težišta
Jedno od osnovnih pitanja pri rješavanju zadataka iz mehanike je i
odre
đ
ivanje središta (napadne ta
č
ke rezultante) sistema paralelnih sila
uz primjenu Varinjonove teoreme. Sa ovim zadatkom se susre
ć
emo i pri
odre
đ
ivanju položaja težišta tijela.
Kako je kruto materijalno tijelo u polju Zemljine teže, na svaki
elementarni dio tijela djeluje sila teže usmjerena ka centru Zemlje, slika
8.1.
Slika 8.1 Djelovanje polja sile Zemljine teže na kruto materijalno tijelo
Rezultuju
ć
a sila svih elementarnih težina
Δ
G
i
odgovara ukupnoj težini
tijela.
1
n
i
i
G
G
=
=
Δ
∑
.....................................................................................(8.1)
Napadna ta
č
ka u kojoj djeluje ukupna težina tijela naziva se težište
tijela, a koordinate
x
C
,
y
C
,
z
C
nazivaju se koordinate težišta "
C
".
Koordinate težišta odre
đ
ene su slijede
ć
im izrazima:

290
STATIKA
Izrazi:
1
i
n
y
i i
i
S
A x
=
=
Δ
∑
.............................................................................(8.11)
1
n
x
i
i
i
S
A y
=
=
Δ
∑
............................................................................(8.12)
definišu stati
č
ke momente površine, slika 8.2.
Slika 8.2. Homogena tanka plo
č
a
U slu
č
aju linijskog rasporeda masa homogenih tijela, slika 8.3,
č
ija se
debljina i širina zanemaruje, težina pojedinih elementarnih dijelova
Δ
L
i
,
proporcionalne su njegovoj dužini:
1
n
i
i
L
L
=
=
Δ
∑
......................................................................................(8.13)
Δ
G
i
=
γ
1
Δ
L
i
....................................................................................(8.14)
gdje je:
γ
1
– težina jedinice dužine datog tijela.
Položaj težišta sada je odre
đ
en izrazima:
1
n
i
i
i
C
L x
x
L
=
Δ
=
∑
................................................................................(8.15)
1
n
i
i
i
C
L y
y
L
=
Δ
=
∑
................................................................................(8.16)
1
n
i
i
i
C
L z
z
L
=
=
∑
..................................................................................(8.17)
291
8 - TEŽIŠTE
Slika 8.3 Homogena linija
Prethodno izvedeni izrazi koji su postavljeni na bazi elementarnih
dijelova tijela, ako prevedemo na grani
č
ne vrijednosti, onda ove zadatke
možemo jednostavnije riješiti korištenjem integrala, i to:
−
za slu
č
aj prostornog rasporeda mase homogenog tijela:
1
1
1
C
C
C
v
v
v
x
xdV
y
ydV
z
zdV
V
V
V
=
=
=
∫
∫
∫
.............................. (8.18)
−
za slu
č
aj površinskog rasporeda mase homogenog tijela:
1
1
1
C
C
C
A
A
A
x
xdA
y
ydA
z
zdA
A
A
A
=
=
=
∫
∫
∫
............................... (8.19)
−
za slu
č
aj linijskog rasporeda mase homogenog tijela:
1
1
1
C
C
C
L
L
L
x
xdL
y
ydL
z
zdL
L
L
L
=
=
=
∫
∫
∫
................................. (8.20)
gdje je:
x
,
y
,
z
koordinate napadnih ta
č
aka elementarnih težina.
8.2 Položaj težišta homogenih tijela koji
imaju ose simetrije
U slu
č
aju da homogeno tijelo ima jednu ili više osa simetrije, slika 8.4,
težište tog tijela se nalazi na osi simetrije.

293
8 - TEŽIŠTE
Slika 8.5 Površina koju opisuje linija AB pri rotaciji oko ose z
Površina opisanog tijela je:
L
L
L
A
dA
r dL r
dL
ϕ
ϕ
=
=
=
∫
∫
∫
.............................................................. (8.24)
Za slu
č
aj da je
ϕ
= 2
π
, tada je površina formiranog tijela:
2
2
L
A
r
dL
r L
π
π
=
=
∫
........................................................................ (8.25)
Druga teorema.
Zapremina tijela koje nastaje obrtanjem ravne površine
oko date ose, jednaka je proizvodu površine ravne figure i dužine luka
koju opiše težište te ravne figure, slika 8.6.
Slika 8.6. Tijelo koje nastaje rotacijom površine A oko ose z
294
STATIKA
dV
=
r
ϕ
dA
....................................................................................(8.26)
Ukupna zapremina formiranog tijela je:
LA
A
A
V
dV
r dA r
dA
ϕ
ϕ
=
=
=
∫
∫
∫
...........................................................(8.27)
za slu
č
aj da je
ϕ
= 2
π
2
2
A
V
r
dA
r A
π
π
=
=
∫

296
STATIKA
Slika 8.8 Složena homogena linija razložena na elementarne linije
Radi preglednosti, sve vrijednosti za odre
đ
ivanje težišta date linije
prikazat
ć
emo tabelarno.
Tabela 1. Osnovni podaci homogene linije prikazani tabelarno.
i L
i
(cm)
x
i
(cm)
y
i
(cm)
L
i
x
i
(cm
2
)
L
i
y
i
(cm
2
)
1 2
R
2
R
1 0 0 2 0
2
R
π
3,14
3
R
3 2
R
/
π
0,64
9,42 2,01
3 2
R
2 4
R
4
R
1 8 2
4 2
R
2
2,83
3
R
3 3
R
3 8,49 8,49
5
R
π
3,14 2(2
R)
/
π
1,27
4
R
-
2(2
R)
/
π
2,73
3,99 8,57
∑
13,11
31,90
21,07
Prema jedna
č
inama (a) i (b), a na osnovu podataka iz tabele 1 slijedi:
31,90
21,07
2,43 cm
1,61 cm.
13,11
13,11
T
T
x
y
=
=
=
=
Veli
č
inu površine koja nastaje rotacijom linije oko osa
x
i
y
odredit
ć
emo
primjenom Guldinove teoreme na osnovu koje slijedi:
297
8 - TEŽIŠTE
−
rotacija oko ose x
A
x
=
α
⋅
L
⋅
y
T
= 2
π
⋅
L
⋅
y
T
, .............................................................. (c)
A
x
= 2
⋅
3,14
⋅
13,11
⋅
1,61
= 132,55 cm
2
−
rotacija oko ose y
A
y
=
α
⋅
L
⋅
x
T
= 2
π
⋅
L
⋅
x
T
,............................................................... (d)
A
y
= 2
⋅
3,14
⋅
13,11
⋅
2,43 = 200,06 cm
2
Ugao
α
uvrštavamo u radijanima.
b) Grafi
č
ko rješenje
Koriste
ć
i razmjeru za dužinu
L
U
=1cm/1cm nacrtamo oblik linije u
koordinatnom sistemu
x
O
y
, a u razmjeri
L
U
=2cm
2
/1cm nacrtamo
poligon ekvivalentnih "sila"
č
ije su napadne ta
č
ke težišta T
1
, T
2
, T
3
, T
4
i
T
5
pojedinih segmenata linije. Intenzitet tih "sila" jednak je dužini
pojedinih segmenata linije. Dakle, imamo sistem paralelnih vektora
č
ija
se rezultanta L dobija primjenom poligona sila i verižnog poligona. Ako
vektore zaokrenemo u istu stranu za ugao 90
0
, možemo odrediti
rezultantu
'
L
G
, vektora
'
'
'
'
'
1
2
3
4
5
, , ,
,
L L L L i L
G G G G
G
primjenom poligona sila i
verižnog poligona kao u slu
č
aju rezultante
L
H
vektora
1
2
3
4
5
, ,
,
.
L L L L i L
G G G G
G
Presjek pravaca rezultanti
L
G
i '
L
G
definiše težište T date
linije.
Koordinate težišta T linije, dobivene grafi
č
kim postupkom na slici 8.9,
su:
,
1cm
2,43cm
2,43cm
1cm
,
1cm
1,61cm
1,61cm
1cm
T
L
T
T
T
L
T
T
x
Om U
x
x
y
On U
y
y
=
⋅
=
⋅
=
=
⋅
=
⋅
=

299
8 - TEŽIŠTE
Zadatak 8.2
Za datu površinu prikazanu na slici analiti
č
ki i grafi
č
ki
odrediti koordinate težišta i veli
č
inu zapremine tijela nastalog rotacijom
date površine oko
x
i
y
ose za ugao
α
= 360
0
ako je
R
=1 cm.
Slika 8.10 Homogena površina
Rješenje
a) Analiti
č
ko rješenje
Datu složenu površinu rastavit
ć
emo na odre
đ
en broj elementarnih
geometrijskih površina za koje je položaj težišta definisan u
odgovaraju
ć
im tabelama. Pri tome
ć
emo izvršiti odgovaraju
ć
e
dopunjavanje i oduzimanje elementarnih površina kako je prikazano na
slici 8.11.
Koordinate težišta date površine odredit
ć
emo na osnovu izraza:
1 1
2 2
3
3
4
4
5
5
1
1
2
3
4
5
s
i
i
i
T
A x
A x
A x
A x
A x
A x
x
A
A
A
A
A
A
=
−
+
−
+
=
=
−
+
−
+
∑
......................... (a)
1 1
2 2
3
3
4
4
5 5
1
1
2
3
4
5
s
i
i
i
T
A y
A y
A y
A y
A y
A y
y
A
A
A
A
A
A
=
−
+
−
+
=
=
−
+
−
+
∑
.......................... (b)
300
STATIKA
Slika 8.11 Homogena složena površina razložena
na elementarne površine
Radi preglednosti, sve vrijednosti za odre
đ
ivanje položaja težišta date
složene površine date su tabelarno.
Tabela 8. Osnovni podaci homogene površine prikazani tabelarno
i
A
i
(cm
2
)
x
i
(cm)
y
i
(cm)
A
i
x
i
(cm
2
)
A
i
y
i
(cm
2
)
1 8
R
2
8 2
R
2
R
1 16 8
2
2
2
R
π
−
-
1,57
3
R
3
4
3
R
π
0,42
-4,71 -0,66
3 4
R
2
4
R
1 3
R
3 4 12
4
-
R
2
π
-
3,14
4(2 )
3
R
π
0,85
4
R
-
4(2 )
3
R
π
3,15
-2,67 -
9
,
81
5 2
R
2
2
2
2
3
R
R
+
2,67 2
R
+
2
3
R
2,67
5,34 5,34
∑
9,29
17,96
14,79

302
STATIKA
,
1cm
1,59cm
1,59cm
1cm
T
L
T
T
y
On U
y
y
=
⋅
=
⋅
=
Slika 8.12 Grafi
č
ko rješenje zadatka 8.2
'
1
1
'
2
2
'
3
3
'
4
4
'
5
5
' '
4cm
' '
0,79cm
' '
2cm
' '
1,57cm
' '
1cm
A
A
LA
A
A
A
A
A
LA
A
A
A
ab a b
U
U
A
A
bc b c
U
U
A
A
cd c d
U
U
A
A
de d e
U
U
A
A
ef
e f
U
U
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
1cm
1cm
L
U
=
2
2
2cm
4,65cm
9,3cm
1cm
2cm
'
' '
4,65cm
9,3cm
1cm
A
A
A af U
A
a f U
=
⋅
=
⋅
=
=
⋅
=
⋅
=
2
2cm
1cm
A
U
=
303
PROIZVOLJNI
PROSTORNI SISTEM
SILA
9.1 Moment sile za osu
Za objašnjavanje dejstva proizvoljnog prostornog sistema sila treba
uvesti i moment sile za osu. MOMENT SILE ZA OSU karakteriše obrtni
efekt sile koja teži da obrne tijelo oko neke ose. Da bi se izu
č
ilo dejstvo
sile
F
JG
na tijelo (slika 9.1), u odnosu na z osu, potrebno je silu
projektovati na ravan Oxy koja je okomita na osu z, a zatim izra
č
unati
moment projekcije
xy
F
G
u u odnosu na ta
č
ku O u kojoj osa z prodire
kroz ravan O
xy
.
Sila
F
JG
razloži se na
xy
F
G
i
Z
JG
komponente.
Komponenta
Z
JG
ne
može da obrne tijelo
oko ose z, jer je
paralelna toj osi i
može samo da ga
translatorno pomjeri
duž ose z ukoliko je
ono slobodno. Sav
obrtni efekat koji
proizvodi sila
F
JG
jednak je obrtnom
efektu komponente
xy
F
G
sile
F
JG
koja
djeluje u ravni Oxy.
Slika 9.1 Moment sile F
JG
za osu
xy
F
xy
F
xy
Z
F
z
h
1
A
1
A
O

305
9-PROIZVOLJNI PROSTORNI SISTEM SILA
=
+
+
2
2
2
2
AB
AC
CD
DB
pa je ......................................................... (9.3)
(
) (
) (
)
=
−
+
−
+
−
2
2
2
B
A
B
A
B
A
AB
x
x
y
y
z
z
....................................... (9.4)
Slika 9.2 Projekcije sile na ose
Projekcije sile
F
JG
na ose su:
cos
cos
cos
X
F
Y
F
Z
F
α
β
γ
=
=
=
................................................................................... (9.5)
gdje su uglovi
α
,
β
i
γ
uglovi koje sila
F
JG
zatvara sa osama x, y, z.
cos
cos
cos
B
A
B
A
B
A
y
y
AC
AB
AB
x
x
CD
AB
AB
z
z
BD
AB
AB
β
α
γ
−
=
=
−
=
=
−
=
=
.................................................................... (9.6)
pa su projekcije sile na ose:
;
;
B
A
B
A
B
A
x
x
y
y
z
z
X
F
Y
F
Z
F
AB
AB
AB
−
−
−
=
=
=
..................... (9.7)
Dakle, ako je poznat intenzitet sile
F
JG
i koordinate dviju ta
č
aka A(x
A
, y
A
,
z
A
,) i B(x
B
, y
B
, z
B
,), koje leže na napadnoj liniji sile, prvo se odredi
rastojanja AB, a zatim se na
đ
u projekcije te sile na pojedine ose.
F
z
A(x
A
, y
A
, z
A
,)
B(x
B
, y
B
, z
B
,)
x
y
C
D
O
β
α
γ
306
STATIKA
Iz gornjih jedna
č
ina slijedi:
2
2
2
2
F
X
Y
Z
=
+
+
..........................................................................(9.8)
2
2
2
cos
cos
cos
1
α
β
γ
+
+
=
..............................................................(9.9)
9.3 Moment sile za ta
č
ku
Neka na tijelo u ta
č
ki A djeluje sila
F
G
i neka je njen položaj u odnosu
na ta
č
ku O odre
đ
en vektorom
A
r
G
(slika 9.3)
.
Slika 9.3 Moment sile za ta
č
ku
Vektorski proizvod:
O
A
M
r
F
=
×
JJG
G
G
...................................................................................(9.10)
zove se moment sile za ta
č
ku O. Moment je okomit na ravan OAB koju
definišu vektori
A
r
G
i
F
G
i sa
č
ijeg se vrha vidi da
ć
e se pravac vektora
A
r
G
poklopi sa pravcem vektora
F
G
najkra
ć
om rotacijom suprotno od smjera
kazaljke na satu.
Intenzitet tog vektora je:
sin
O
M
r F
F h
α
= ⋅ ⋅
=
⋅
...................................................................(9.11)
gdje je h najkra
ć
e rastojanje ta
č
ke O i napadne linije sile
F
G
.
F
h
O
r
A
M
O
α
B
A

308
STATIKA
x
A
A
y
A
A
z
A
A
M
y Z
z Y
M
z X
x Z
M
x Y
y X
=
−
=
−
=
−
.............................................................................(9.18)
9.5 Varinjonova teorema o momentu za ta
č
ku
rezultante sistema su
č
eonih sila
Teorema:
Moment rezultante prostornog sistema su
č
eljnih sila za
proizvoljnu ta
č
ku jednak je vektorskom zbiru momenata komponentnih
sila za istu ta
č
ku.
Dokaz:
Neka u ta
č
ki A na tijelo djeluje sistem su
č
eljnih sila
č
ija je
rezultanta jednaka (slika 9.5):
1
2
3
...
R
F
F
F
F
=
+
+
+
G
G
G
G
.......................................................................(9.19)
a njene projekcije su:
R
i
R
i
R
i
X
X
Y
Y
Z
Z
=
=
=
∑
∑
∑
....................................................................................(9.20)
Slika 9.5 Sistem sila
Moment rezultante za ta
č
ku O je:
(
)
1
2
3
1
2
3
...
....
O
A
A
A
A
A
M
r
F
r
F
F
F
r
F
r
F
r
F
=
×
=
×
+
+
+
=
×
+
×
+
×
+
G
G
G
G
G
G
G
G
G
G
G
G
G
.....(9.21)
1
2
3
...
O
O
O
O
M
M
M
M
=
+
+
+
G
G
G
G
............................................................(9.22)
č
ime je teorema dokazana.
z
A
x
y
O
r
A
F
1
F
R
F
2
F
3
309
9-PROIZVOLJNI PROSTORNI SISTEM SILA
Posljedica ove teoreme je da je moment rezultante prostornog sistema
su
č
eljnih sila za bilo koju osu jednak algebarskom zbiru momenata
komponentnih sila za tu osu.
Kako je:
i
i
i
i
F
X i Y j
Z k
=
+
+
G
G
G
G
......................................................................... (9.23)
R
R
R
R
F
X i Y j
Z k
=
+
+
G
G
G
G
..................................................................... (9.24)
O
A
i
A
A
A
A
A
A
R
R
R
i
i
i
i
j
k
i
j
k
M
r
F
x
y
z
x
y
z
X
Y
Z
X
Y
Z
=
×
=
=
∑
∑
∑ ∑
G
G
G
G
G
JG
G
G
G
....................... (9.25)
(
)
(
)
(
)
(
)
(
)
(
)
=
−
=
+
+
−
+
+
=
−
=
+
+
−
+
+
=
−
=
+
+
−
+
+
1
2
1
2
1
2
1
2
1
2
1
2
...
...
...
...
...
...
x
A R
A R
A
A
y
A
R
A R
A
A
z
A R
A
R
A
A
M
y Z
z Y
y
Z
Z
z Y
Y
M
z X
x Z
z
X
X
x
Z
Z
M
x Y
y X
x Y
Y
y
X
X
................... (9.26)
Izrazi
x
A R
A R
y
A
R
A R
z
A R
A
R
M
y Z
z Y
M
z X
x Z
M
x Y
y X
=
−
=
−
=
−
........................................................................ (9.27)
predstavljaju momente sila za ose. Momenti
Mx, My, Mz
su mjera
tendencije sile
F (X ,Y, Z)
ili rezultante sila
F
R
(X
R,
Y
R,
Z
R
)
da obrne tijelo,
na koje djeluje, oko osa x, y, z. Ovo slijedi iz Varinjonove teoreme:
Moment sile
F
za bilo koju osu jednak je algebarskom zbiru momenta
njenih komponenti
G G
G
, ,
Xi Yj Zk
.
Primjer:
Zadan je intenzitet sile
F=
100 N (slika 9.6). Odrediti momente
sile za ose.
Slika 9.6 Moment sile za ose
z
C (0,4,
3
)
x
y
O
D (2,0,1)
F
X
Y
Z
z
x
y
O
M
O
M
x
M
z
M
y

311
9-PROIZVOLJNI PROSTORNI SISTEM SILA
jer je
F
G
=
−
F
G
'.
Pošto je
(
)
A
B
r
r
BA
−
=
JJJG
G
G
to je
M
BA F
=
×
JJJG
G
G
......................................... (9.29)
Vektor
M
G
je okomit na ravan koju
č
ine vektori
BA
JJJG
i
F
G
tj. na ravan
dejstva sprega i ima smjer takav da se sa vrha tog vektora vidi da spreg
nastoji da obrne tijelo u smjeru suprotnom od smjera kretanja kazaljke
na satu.
Intenzitet tog vektora je:
M
=BA
⋅
F
⋅
sin
α
=
F
⋅
h
tj. jedank je momentu sprega.
Vektor
BA
JJJG
ne zavisi od izbora ta
č
ke O, za koju je tražen moment
M
BA F
=
×
JJJG
G
G
i ovaj moment bi bio isti i ako bi se ra
č
unao za bilo koju
drugu ta
č
ku (zato nema O u indeksu), pa je moment sprega slobodan
vektor i može se slobodno premještati u prostoru paralelno samom sebi.
Otuda je opravdano njegovo predstavljanje kao na slici 9.8.
Slika 9.8 Moment sprega
Moment se može slobodno premještati u ravni svog dejstva ili u neku
drugu ravan paralelnu sa ravni njegovog dejstva i za njega važe sve
osobine kao za spreg u statici u ravni.
9.7 Sabiranje spregova
Neka na tijelo djeluju dva sprega sila u ravnima T
1
i T
2
koje se
presijecaju duž pravca AB (slika 9.9). Spregovi se mogu premještati u
ravnima svojih dejstava, a oba se mogu predstaviti preko parova sila
F
G
1
i
F
G
1
' i
F
G
2
i
F
G
2
' sa izabranim rastojanjem AB.
z
F
F
'
x
y
≡
z
M
x
y
T
T
M
⊥
T
F'
≡
z
M
x
y
≡
z
M
z
y
x
M
y
M
x
312
STATIKA
Slika 9.9 Spregovi u dvije ravni
1
1
M
F AB
=
⋅
...................................................................................(9.30)
2
2
M
F AB
=
⋅
.................................................................................(9.31)
Moment rezultiraju
ć
eg sprega
č
ini
ć
e par sila
F
G
R
i
F
G
R
'
(
)
1
2
1
2
1
2
R
M
AB F
AB
F
F
AB F
AB F
M
M
=
×
=
×
+
=
×
+
×
=
+
JJJJG
JJJJG
JJJJG
JJJJG
G
G
G
G
G
G
G
G
..............(9.32)
tj. rezultuju
ć
i spreg
M
G
jednak je vektorskom zbiru komponentnih
spregova
M
G
1
i
M
G
2
. Spreg
M
G
1
okomit je na ravan T
1
, a
M
G
2
okomit je na
ravan T
2
, dok je
R
M
AB F
=
×
JJJJG
G
G
okomit na ravan koju
č
ine vektori
F
G
R
i
F
G
R
'.
Ako na tijelo djeluje više spregova, oni se u parovima mogu sabirati na
opisani na
č
in tako da je rezultanta sprega jedanka vektorskom zbiru
komponentnih spregova:
1
2
3
....
i
M
M
M
M
M
=
+
+
+
=
∑
G
G
G
G
G
.......................................................(9.33)
F
1
'
B
A
F
1
'
F
2
'
F
2
'
F
R
'
F
R
'
T
2
T
1

314
STATIKA
Glavni vektor ne zavisi od izbora ta
č
ke redukcije, a glavni moment
zavisi. Oni, u principu, nisu me
đ
usobno okomiti.
Slika 9.11 Glavni vektor i glavni moment
;
;
R
R
R
X
X
Y
Y
Z
Z
=
=
=
∑
∑
∑
.............................(9.36)
;
;
;
O x
x
O y
y
O z
z
M
M
M
M
M
M
=
=
=
∑
∑
∑
........................(9.37)
2
2
2
R
R
R
R
F
X
Y
Z
=
+
+
...................................................................(9.38)
2
2
2
O
O x
O y
O z
M
M
M
M
=
+
+
.........................................................(9.39)
Mogu nastupiti slijede
ć
i slu
č
ajevi:
1.
R
F
G
=0
O
M
G
=0 sistem je u ravnoteži
2.
R
F
G
≠
0
O
M
G
=0 sistem nije u ravnoteži i svodi se na rezltantu
R
F
G
3.
R
F
G
=0
O
M
G
≠
0 sistem nije u ravnoteži i svodi se na spreg sila
O
M
G
4.
R
F
G
≠
0
O
M
G
≠
0 sistem nije u ravnoteži i za razliku od ravnog sistema
sila, gdje su vektori
O
M
G
i
R
F
G
uvijek okomiti, vektori
O
M
G
i
R
F
G
nisu u opštem slu
č
aju okomiti.
Ovdje razlikujemo tri slu
č
aja:
a) vektori
O
M
G
i
R
F
G
su okomiti
O
M
G
⊥
R
F
G
Sistem se može redukovati na rezultantu koja ne prolazi kroz ta
č
ku O
(sli
č
no kao kod ravanskog slu
č
aja). Ako je
O
M
G
⊥
R
F
G
, tada postoji par sila
kojima se može predstaviti spreg
O
M
G
i koje leže u ravni dejstva sile
R
F
G
.
r
1
F
1
O
≡
≡
O
x
F
G
M
o
1
1
2
2
3
3
1
2
3
O
O
O
M
r F
M
r
F
M
r
F
= ×
= ×
= ×
G
G
G
G
G
G
G
G
G
r
2
r
3
F
2
F
3
O
F
1
M
o1
F
2
M
o2
M
o3
y
z
F
3
315
9-PROIZVOLJNI PROSTORNI SISTEM SILA
Ako se
O
M
G
predstavi pomo
ć
u para sila
R
F
G
i
R
F
G
' tako da je
R
O
F
h
M
⋅ =
,
slu
č
aj se svodi na rezultantu u ta
č
ki A (slika 9.12).
Slika 9.12 Slu
č
aj
O
M
G
⊥
R
F
G
b)
vektori
O
M
G
i
R
F
G
su paralelni
O
M
G
II
R
F
G
Pod dejstvom
O
M
G
i
R
F
G
tijelo se kre
ć
e poput zavrtnja. Sistem se svodi na
dinami
č
ki zavrtanja ili dinamu.
Dalje svo
đ
enje sistema nije mogu
ć
e jer
se takvo kretanje ne može ostvariti dejstvom jedne jedine sile
(rezultante) ili samo spregom sila.
Slika 9.13 Slu
č
aj
O
M
G
II
R
F
G
O F
R
M
O
O
A
≡
F
R
M
O
O
F
R
F
R
'
F
R
h
≡
A
O
F
R
h
x
y
z
z
y
x
z
x
y

317
9-PROIZVOLJNI PROSTORNI SISTEM SILA
slijede i potrebni i dovoljni analiti
č
ki uslovi ravnoteže proizvoljnog
prostornog sistema sila koji djeluje na kruto tijelo:
0
0
0
0
0
0
x
y
z
X
Y
Z
M
M
M
=
=
=
=
=
=
∑
∑
∑
∑
∑
∑
.............................................. (9.40)
Fizi
č
ko zna
č
enje je sljede
ć
e:
Prve tri jedna
č
ine (
R
F
G
=0) zadovoljavaju uslove da nema translacije u
pravcu osa x, y, z, odnosno da nema bilo kakve translacije tijela.
Druge tri jedna
č
ine
0
O
M
=
∑
G
svaka za sebe izražavaju zahtjev da ne
bude rotacije oko osa. Dakle, svih šest jedna
č
ina osiguravaju odsustvo
bilo kakve translacije i rotacije.
9.9.1 Analiti
č
ki uslovi ravnoteže u nekim specijalnim
slu
č
ajevima prostornog sistema sila
Jedna
č
ine (izraz 9.40) su potrebni analiti
č
ki uslovi ravnoteže prostornog
sistema sila. U nekim slu
č
ajevima može biti i manje uslova. Npr. u
slu
č
aju sistema sila koje djeluju duž jednog pravca, npr. duž ose x
potrebno je postaviti samo jednu jedna
č
inu
0
X
=
∑
. Ostalih pet je
zadovoljeno. Proizvoljni ravni sistem je specijalan slu
č
aj prostornog
sistema.
Analiti
č
ki uslovi ravnoteže prostornog sistema su
č
eljnih sila
Ako na kruto tijelo djeluje
prostorni sistem su
č
eljnih
sila za ravnotežu je potrebno:
0
0
0
X
Y
Z
=
=
=
∑
∑
∑
Uslov da je
O
M
G
=0 je
identi
č
no zadovoljen, pa su
zadovoljene i preostale tri
jedna
č
ine ravnoteže. Ako se
radi o su
č
eljnom, ravnom
sistemu sila, tada je
0
Z
=
∑
pa se jedna
č
ine
svode na dvije.
Slika 9.15 Prostorni su
č
eljni sistem sila
z
x
y
O
F
1
F
2
F
3
318
STATIKA
Analiti
č
ki uslovi ravnoteže prostornog sistema paralelnih sila
Ako su sve sile paralelne osi x,
tada je:
0
0
0
x
Y
Z
i
M
=
=
=
∑
∑
∑
pa
i ostaju uslovi:
0
0
0
y
z
X
M
M
=
=
=
∑
∑
∑
Ako sve sile leže u ravni Oxy tada je i
0
y
M
=
∑
, pa se jedna
č
ine svode na
uslove ravnoteže ravnog sistema sila.
Analiti
č
ki uslovi ravnoteže prostornog sistema spregova
Ako na tijelo djeluju samo
spregovi tada je:
0
X
Y
Z
=
=
=
∑
∑ ∑
zadovoljeno
pa preostaju uslovi:
0
0
0
x
y
z
M
M
M
=
=
=
∑
∑
∑
Ako su vektori spregova
me
đ
usobno paralelni sa osom z
tada je
0
i
0
x
y
M
M
=
=
∑
∑
pa ostaje
samo uslov
0
z
M
=
∑
.
9.10 Veze i njihove reakcije u prostornim
problemima
Za svaku vezu treba ispitati da li se suprotstavlja translacijama u
pravcu osa i rotacijama oko osa. Ako se suprotstavlja, treba nacrtati
odgovaraju
ć
i vektor.
Slika 9.16 Prostorni sistem
paralelnih sila
Slika 9.17 Sistem spregova
z
x
y
O
F
1
F
2
F
3
z
x
y
O
M
1
M
2
M
3

320
STATIKA
4.
Pokretni oslonac na hrapavoj ravni ili
nepokretni oslonac pri
č
vrš
ć
en za tu
ravan.
5.
Sferni glatki zglob ne dozvoljava translaciju
niti u jednom pravcu u prostoru.
Z
Y
X
Z
Y
X
321
9- PROIZVOLJNI PROSTORNI SISTEM SILA
Primjeri:
Zadatak 9.1
Na kocku, strane a=10 cm, djeluju sile prikazane na slici
6.1. Veli
č
ine svih sila su jednake i iznose F=10 kN. Svesti ovaj sistem
sila na prostiji oblik, tj. na glavni vektor i glavni moment.
Slika 9.18 Prostorni sistem sila na kocki
Rješenje:
Posmatrat
ć
e se dijagonalna ravan kocke odre
đ
ena bridovima CDBA u
kojoj leži sila
5
F
G
. Definisat
ć
e se ugao
ϕ
koga sila zaklapa sa ravninom
Oxy.
Slika 9.19 Dijagonalna
ravan kocke
CDBA
10 2
2
10
3
sin
3
10 3
3
10 3
co
ϕ
ϕ
=
=
=
=
........................................ (a)

323
9- PROIZVOLJNI PROSTORNI SISTEM SILA
2
2
10 10
10 10
10 10 41,42 kNcm
2
2
x
M
=
⋅
⋅
+
⋅
⋅
−
⋅
=
Intenzitet glavnog momenta
2
2
2
x
y
z
M
M
M
M
=
+
+
.................................................................. (j)
(
) (
) (
)
2
2
2
29,29
70,7
41,42
87,01 kNcm
M
=
+
+
=
Uglovi koje glavni moment zaklapa sa pravcima osa:
1
1
1
1
1
1
29,29
cos
0,3366
70,33
87,01
70,7
cos
0,8125
144,34
87,01
41,42
cos
0,4760
61,57
87,01
x
y
z
M
M
M
M
M
M
α
α
β
β
γ
γ
=
=
=
=
°
=
= −
= −
=
°
=
=
=
=
°
......................... (k)
Zadatak 9.2
Homogena kvadratna plo
č
a, težine
G
i stranica
a
, vezana je
sfernim zglobom A i cilindri
č
nim B za postolje, a u datom položaju,
prema slici 9.20, održava je uže KC. Za plo
č
u je, u ta
č
ki D, oka
č
en teret
Q
=2
G
, a u ta
č
ki E djeluje sila
F=G
. Odrediti reakcije u ležištima i silu u
užetu KC.
Slika 9.20 Kvadratna plo
č
a
324
STATIKA
Rješenje:
Plo
č
a
ć
e se osloboditi veza sa okolinom i njihov uticaj zamjenit
ć
e se
reakcijama (slika 9.21).
Poged sa stane
Slika 9.21 Aktivne sile i reakcije oslonaca koje djeluju na plo
č
u
Stati
č
ki uslovi ravnoteže plo
č
e su:
0
cos 60
0
A
B
X
X
X
S
=
+
−
° =
∑
................................................(a)
0
0
A
Y
Y
F
=
−
=
∑
..................................................................(b)
0
sin60
0
A
B
Z
Z
Z
S
G Q
=
+
+
° −
−
=
∑
.....................................(c)
0
sin30
0
2
2
x
B
a
a
M
G
Q a Z
a F
=
− ⋅
− ⋅ +
⋅ + ⋅ ⋅
° =
∑
......................(d)
0
cos 30
cos 30
0
2
y
a
M
G
Q a
S a
=
⋅ ⋅
° +
⋅ ⋅
° − ⋅ =
∑
.........................(e)
0
cos 30
0
2
z
B
a
M
X
a F
=
−
⋅ + ⋅ ⋅
° =
∑
..........................................(f)
Rješavanjem sistema od šest jedna
č
ina dobivamo šest nepoznatih
reakcija oslonaca:
( )
A
b
Y
F
G
=
=
( )
3
cos 30
2
4
B
F
G
f
X
−
=
° = −

326
STATIKA
Slika 9.23 Aktivne sile i reakcije oslonaca
plo
č
e u ravnotežnom položaju
Stati
č
ki uslovi ravnoteže plo
č
e:
0
0
A
X
X
=
=
∑
......................................................................(a)
0
cos 60
0
A
B
E
Y
Y
Y
F
=
+
−
° =
∑
...............................................(b)
0
sin60
0
A
B
E
Z
Z
Z
F
G
=
+
+
° −
=
∑
........................................(c)
0
cos 30
0
2
x
E
a
M
F
a G
=
⋅ − ⋅ ⋅
° =
∑
.............................................(d)
0
sin60
sin30
0
2
2
y
E
E
a
a
M
Z
a F
G
M
=
−
⋅ −
⋅
⋅
° +
⋅
−
⋅
° =
∑
............(e)
0
cos 60
cos 30
0
2
z
B
E
a
M
Y
a F
M
=
⋅ −
⋅
⋅
° +
⋅
° =
∑
.........................(f)
Rješavanjem sistema jedna
č
ina dobivaju se nepoznate reakcije
oslonaca:
( )
( )
( )
a
0
d
cos 30
4,33 kN
2
e
sin60
cos 30
1,875 kN
2
2
A
E
E
B
X
G
F
F
G
M
Z
a
=
=
° =
=
−
° −
° = −
327
9- PROIZVOLJNI PROSTORNI SISTEM SILA
( )
( )
( )
f
cos 60
cos 30
7,58 kN
2
b
cos 60
9,74 kN
c
sin60
8,125 kN
E
B
A
E
B
A
B
E
F
M
Y
a
Y
F
Y
Z
G Z
F
=
° −
° = −
=
° −
=
=
−
−
° =
Intenziteti reakcija sfernog A i cilindri
č
nog zgloba B su:
2
2
2
2
12,68 kN
7,8 kN
A
A
A
B
B
B
F
X
Z
F
Y
Z
=
+
=
=
+
=
Zadatak 9.4
Pravougaona vrata ABCD, težine
G
=150 N i dimenzija
2x3m, mogu se okretati oko osovine AB. U ta
č
ki A, vrata su vezana
sfernim zglobom, a u ta
č
ki B pomi
č
nim osloncem. Vjetar ja
č
ine 100
N/m
2
djeluje na vrata paralelno ravni xAy pod uglom
α
=60
°
. U ta
č
ki D
vrata su vezana užetom za ta
č
ku E, gdje je AE=1m. Odrediti veli
č
ine
reakcija u osloncima i silu u užetu DE.
Slika 9.24 Pravougaona vrata
Rješenje:
Vrata
ć
e se osloboditi veza sa okolinom i njihov uticaj zamjenit
ć
e se
reakcijama (slika 9.25).

329
9- PROIZVOLJNI PROSTORNI SISTEM SILA
0
1
1,5 cos 60
3 0
x
B
M
G
W
Y
=
− ⋅ −
⋅
⋅
° −
⋅ =
∑
................................ (f)
0
3
1,5 sin60
0
y
B
M
X
W
=
⋅ −
⋅
⋅
° =
∑
........................................... (g)
0
2 sin
sin60 1 0
z
M
S
W
α
=
− ⋅ ⋅
+
⋅
° ⋅ =
∑
..................................... (h)
2
2
N
100
6m
600 N
m
W
p A
=
⋅
=
⋅
=
................................................... (i)
Rješavanjem sistema od šest jedan
č
ina dobivaju se vrijednosti
nepoznatih reakcija:
( )
( )
( )
( )
( )
( )
1 sin60
h
580,96 N
2 sin
1,5 sin60
g
259,8 N
3
1
1,5 cos 60
f
200 N
3
e
150 N
d
cos
cos 60
419,63 N
c
sin60
sin
0 N
B
B
A
A
B
A
B
W
S
W
X
G
W
Y
Z
G
Y
S
W
Y
X
W
S
X
α
α
α
⋅ ⋅
°
=
=
⋅
⋅
⋅
°
=
=
− ⋅ +
⋅
⋅
°
=
= −
=
=
= ⋅
−
⋅
° −
=
=
° −
−
=
Intenziteti reakcija sfernog A i pomi
č
nog oslonca B su:
2
2
2
2
2
445,63 N
327,23 N
A
A
A
A
B
B
B
F
X
Y
Z
F
X
Y
=
+
+
=
=
+
=
Zadatak 9.5
Vrata, težine
G
=100 N, visine 2m i širine 1m, u
č
vrš
ć
ena su
u ta
č
kama A i B. U ta
č
ki C privezano je uže koje je preba
č
eno preko
kotura H. Na drugom kraju užeta obješen je teret
Q
=10 N. Trenje se
zanemaruje. Odrediti:
a) silu
F
koja djeluje okomito na vrata, koja je potrebna da vrata
ostanu otvorena pod uglom
α
=30
°
(CE=ED),
b) reakcije u ležištima vrata A i B.
330
STATIKA
Slika 9.26 Vrata ABCD
Rješenje:
Vrata
ć
e se osloboditi veza sa okolinom i njihov uticaj zamjenit
ć
e se
reakcijama (slika 9.27).
Slika 9.27 Aktivne sile i reakcije oslonaca u ravnotežnom položaju vrata
332
STATIKA
Slika 9.28 Plo
č
a sa isje
č
kom
Rješenje:
Plo
č
a
ć
e se osloboditi veza sa okolinom i njihov uticaj zamjenit
ć
e se
reakcijama (slika 9.29).
Slika 9.29 Aktivne sile i reakcije veza u
ravnotežnom položaju plo
č
e
333
9- PROIZVOLJNI PROSTORNI SISTEM SILA
Da bi se postavila aktivna sila težine plo
č
e i sila vjetra, potrebno je
odrediti koordinate težišta.
Težište plo
č
e ABCD:
1,5 m
i i
T
i
A z
z
A
=
=
∑
∑
...................................................................... (a)
2
T
2
4
2
3
2
2
3
y
0,797 m
2
3
2
i i
i
R
R
R
R R
R
A y
A
R
R
R
π
π
π
⎛
⎞
⋅
⋅ −
−
⎜
⎟
⎝
⎠
=
=
=
⋅
−
∑
∑
..................... (b)
Sila vjetra je:
2
2
6
44,3 kN
2
R
W
A w
R
w
π
⎛
⎞
=
⋅
=
−
⋅
=
⎜
⎟
⎜
⎟
⎝
⎠
........................................... (c)
Stati
č
ki uslovi ravnoteže plo
č
e su:
sin
sin60
0
A
B
X
X
X
S
W
α
=
+
+
−
° =
∑
.......................................... (d)
cos
cos 60
0
A
B
Y
Y
Y
S
W
α
=
+
−
+
° =
∑
........................................... (e)
0
A
Z
Z
G
=
−
=
∑
.......................................................................... (f)
cos 60
3
0
x
T
T
B
M
G y
W z
Y
R
=
⋅
+
⋅
° +
⋅
=
∑
..................................... (g)
3
sin60
0
y
B
T
M
X
R W z
=
⋅
−
⋅
° =
∑
................................................ (h)
2
sin
sin60
0
z
T
M
S
R
W y
α
= ⋅
⋅
−
⋅
° =
∑
.......................................... (i)
Ugao
α
sa slike je:
1
2
2
ED
R
tg
R
AD
α
=
=
=
........................................................................ (j)
5
sin
5
2 5
cos
5
α
α
=
=
Iz prethodnih 6 jedan
č
ina dobivaju se nepoznate reakcije oslonaca
plo
č
e:
( )
f
50 kN
A
Z
G
=
=
( )
(
)
1
g
cos 60
24,36 kN
3
B
T
T
Y
G y
W z
R
= −
⋅
+
⋅
° = −

335
9- PROIZVOLJNI PROSTORNI SISTEM SILA
Slika 9.31 Aktivne sile i reakcije oslonaca
u ravnotežnom položaju stativa
Stati
č
ki uslovi ravnoteže stativa su:
0
X
=
∑
........................................................................................ (a)
0
Y
=
∑
........................................................................................ (b)
0
A
B
D
Z
F
F
F
Q G
=
+
+
−
−
=
∑
....................................................... (c)
0
2
2
x
B
A
a
a
M
F
F
Q l
=
−
−
⋅ =
∑
........................................................ (d)
(
)
2
1
0
3
3
y
D
A
B
M
F
a
F
F
a
=
−
+
=
∑
................................................... (e)
0
z
M
=
∑
..................................................................................... (f)
Uvrštavanjem vrijednosti
G
=120 N u jedna
č
inu (c) i sre
đ
ivanjem
jedan
č
ine (e) dobiva se:
120 0
A
B
D
F
F
F
Q
+
+
−
−
=
.............................................................. (c')
2
0
D
A
B
F
F
F
−
−
=
.......................................................................... (e')
Sabiranjem (c') i (e') jedna
č
ine dobiva se:
3
D
F
G Q
=
+
3
D
G Q
F
+
=
.................................................................................... (g)
336
STATIKA
Iz jedna
č
ine (d) dobiva se:
2
B
A
L
F
F
Q
a
−
=
..............................................................................(d')
Iz jedan
č
ine (e) dobiva se:
2
3
B
A
G Q
F
F
+
+
=
...........................................................................(e'')
Iz dvije prethodne jedna
č
ine dobiva se:
(
)
1
3
B
L
F
G Q
Q
a
=
+
+
.......................................................................(h)
(
)
1
3
A
L
F
G Q
Q
a
=
+
−
.......................................................................(i)
Reakcija
F
A
ne može biti negativna pa postoji uslov:
(
)
1
0
3
L
G Q
Q
a
+
−
>
.........................................................................(i')
34,3 N
Q
<
Za Q=30 N
(
)
(
)
(
)
B
1
50 N
3
1
5 N
3
1
F
95 N
3
D
A
F
G Q
L
F
G Q
Q
a
L
G Q
Q
a
=
+
=
=
+
−
=
=
+
+
=
Zadatak 9.8
Pomo
ć
u
č
ekrka prikazanog na slici 9.32 podiže se
ravnomjerno teret
Q
=100 kN. Polupre
č
nik doboša
R
= 5 cm, dužina
ru
č
ice KD=40 cm, dužina DA=30 cm, AC=40 cm, CB=60 cm. Uže se
odvija sa doboša u pravcu tangente nagnute pod uglom od 60
°
prema
horizontali. Odrediti silu pritiska
P
na ru
č
icu KD kao i otpore oslonaca
A i B za položaj
č
ekrka kad je ru
č
ica DK horizontalna.

338
STATIKA
sin60
0
x
B
M
Z
AB Q AC
P AD
=
⋅
+
⋅
° + ⋅
=
∑
....................................(d)
0
y
M
Q R P KD
=
⋅ − ⋅
=
∑
...............................................................(e)
cos 60
0
z
B
M
Q AC
X
AB
=
⋅
⋅
° +
⋅
=
∑
..............................................(f)
Nepoznate vrijednosti sila dobivaju se rješavanjem prethodnog sistema
jedna
č
ina:
( )
( )
( )
( )
( )
cos 60
f
20 kN
e
12,5 kN
sin60
d
38,4 kN
c
sin60
35,7 kN
a
cos 60
30 kN
B
B
A
B
A
B
Q AC
X
AB
Q R
P
KD
P AD Q AC
Z
AB
Z
P Q
Z
X
Q
X
⋅
⋅
°
=
= −
⋅
=
=
⋅
+
⋅
⋅
°
= −
= −
=
− ⋅
° −
= −
= − ⋅
° −
= −
Intenziteti reakcija oslonaca A i B su:
2
2
2
2
46,63 kN
43,29 kN
A
A
A
B
B
B
F
X
Z
F
X
Z
=
+
=
=
+
=
Zadatak 9.9
Na vratilu AB, dužine
L
=1,5 m i težine
G
=100 N, nalaze se
dvije remenice, polupre
č
nika
r
1
=20 mm i
r
2
=15 mm i težina
Q
1
=300 N i
Q
2
= 250 N. Remenice su raspore
đ
ene na dužinama AC=0,5 m i AD=1 m
od lijevog ležišta A. Remen na prvoj remenici C gradi sa pravcem
horizontale ugao
α
=30
°
, a sila
F
1
' = 2
⋅
F
1
. Obje grane remena na drugoj
remenici su horizontalne, a sile u njima su
F
2
'
= 2
F
2
=2400 N. Odrediti
veli
č
ine sila u granima remena na prvoj remenici, kao i otpore
cilindri
č
nih ležišta A i B.
Slika 9.34 Vratilo sa remenicama
339
9- PROIZVOLJNI PROSTORNI SISTEM SILA
Rješenje:
Veze vratila AB sa okolinom prikazane su na slici 9.35.
9.35 Sile u osloncima i remenima
Stati
č
ki uslovi ravnoteže vratila sa remenicama:
2
2
1
1
'
cos 30
' cos 30
0
A
B
X
X
X
F
F
F
F
=
+
+
+
+
⋅
° + ⋅
° =
∑
..................... (a)
0
Y
=
∑
........................................................................................ (b)
1
1
1
2
sin30
' sin30
0
A
B
Z
Z
Z
F
F
G Q
Q
=
+
−
⋅
° −
⋅
° −
−
−
=
∑
................ (c)
1
1
1
2
sin30
' sin30
0
2
x
B
M
Z
AB F
AC F
AC
AB
G
Q AC Q
AD
=
⋅
−
⋅
° ⋅
−
⋅
° ⋅
− ⋅
−
⋅
−
⋅
=
∑
.......................... (d)
1
1
1
1
2
2
2
2
'
'
0
y
M
F r
F r
F r
F r
=
⋅ −
⋅ −
⋅
+
⋅
=
∑
......................................... (e)
2
2
1
1
'
cos 30
' cos 30
0
z
B
M
X
AB F AD F
AD F
AC
F
AC
=
⋅
+
⋅
+
⋅
+
⋅
° ⋅
+
⋅
° ⋅
=
∑
....................... (f)
Pošto je
F
2
'
= 2
F
2
=2400 N, slijedi
F
2
=1200 N. Vrijedi i
F
1
' = 2
⋅
F
1
.
( )
⋅
⋅ −
⋅ −
⋅
+ ⋅
⋅
=
⋅ =
⋅
⋅
⋅
=
=
=
= ⋅
=
1
1
1
1
2
2
2
2
1
1
2
2
2
2
1
1
1
1
Iz e je: 2
2
0
1200 15
900 N
20
' 2
1800 N
F r
F r
F r
F r
F r
F r
F r
F
r
F
F

341
9- PROIZVOLJNI PROSTORNI SISTEM SILA
Slika 9.37 Aktivne sile i reakcije plo
č
e
Definisat
ć
e se uglovi sila u štapovima:
α
α
α
=
=
=
=
4
4
5
;
sin
;
cos
5
41
41
c
tg
a
.............................. (a)
β
β
β
=
=
=
4
4
5
;
sin
;
cos
5
41
41
tg
.................................... (b)
ϕ
ϕ
ϕ
=
=
=
=
+
2
2
2
2
5
;
sin
;
cos
5
27
27
d
tg
a
b
................. (c)
45
γ
=
°
.......................................................................................... (d)
Stati
č
ke jedan
č
ine ravnoteže su:
1
5
6
cos
cos
cos
sin
0
X
S
S
S
F
α
α
ϕ
γ
=
+
−
⋅
−
=
∑
............................. (e)
3
6
cos
cos
cos
0
Y
S
S
β
ϕ
γ
= −
−
⋅
=
∑
............................................... (f)
2
1
5
3
6
4
sin
sin
sin
sin
0
Z
S
S
S
S
G S
S
α
α
β
ϕ
= −
−
−
−
−
+
−
=
∑
.......... (g)
342
STATIKA
2
1
3
6
sin
sin
sin
0
2
x
b
M
S b S
b S
b G
S
b
α
β
ϕ
=
⋅ +
⋅ +
⋅ +
⋅ −
⋅ =
∑
...........(h)
6
sin
0
2
y
a
M
G
S
a
ϕ
=
⋅
−
⋅ =
∑
.........................................................(i)
1
cos
0
z
M
S
b
α
=
⋅ =
∑
....................................................................(j)
Rješavanjem sistema jedna
č
ina dobiva se:
( )
( )
( )
( )
( )
( )
1
2
3
4
5
6
j
0
h
6 kN
f
9,62 kN
g
16,2 kN
e
21,1 kN
i
11,03 kN
S
S
S
S
S
S
=
=
= −
= −
=
=
Zadatak 9.11
Kvadratna plo
č
a prikazana na slici 9.38,
č
iju težinu
zanemarujemo, optere
ć
ena je silom
F
.
Odrediti veli
č
inu i karakter sila u štapovima kojima je plo
č
a poduprta.
Zadano je:
F
= 2
⋅
10
4
N,
a
= 1m.
Slika 9.38 Kvadratna plo
č
a

344
STATIKA
( )
4
2
4
f
2 2 10 N pritisak
S
S
= −
= −
⋅
( )
( )
( )
( )
4
3
4
4
1
3
4
2
4
5
2
4
6
1
2
3
4
5
d
cos 45
2 10 N pritisak
e
cos 45
cos 45
2 10 N zatezanje
b
2 2 10 N zatezanje
c
sin 45
sin 45
sin 45
2 2 10 N pritisak
S
S
S
S
S
S
S
S
S
S
S
S
S
S
= −
° = − ⋅
= −
−
° −
° = ⋅
= −
=
⋅
= −
−
° −
−
° −
° = −
⋅
Zadatak 9.12
Homogena kvadratna plo
č
a sa stranicama dužine
a
i
težine
G
=200 N, u
č
vrš
ć
ena je sfernim zglobom u ta
č
ki A i poduprta sa 3
štapa u ta
č
kama B, C i D. U ta
č
ki D djeluje sila
F
= 2
G
. Odrediti
reakcije zgloba A i sile u štapovima 1, 2 i 3. Zadano je:
2
h a
=
.
Slika 9.40 Kvadratna plo
č
a
Rješenje:
Posmatrat
ć
e se ravnoteža plo
č
e. Štapovi
ć
e se ukloniti i njihovo
djelovanje na plo
č
u zamijenit
ć
e se reakcijama, koje imaju pravac
štapova, a smjer se pretpostavlja. Uklonit
ć
e se i sferni zglob i njegovo
djelovanje zamijenit
ć
e se reakcijama
,
,
A
A
A
X Y Z
G
G
G
(slika 9.41).
345
9- PROIZVOLJNI PROSTORNI SISTEM SILA
Slika 9.41 Reakcije u osloncima plo
č
e
Uglovi štapova prema plo
č
i:
α
α
α
β
β
β
=
=
=
=
=
=
=
=
=
2
1
2
2
2
sin
;
cos
2
2
2
2
2
1
3
sin
;
cos
3
3
3
a
tg
a
a
tg
a
Stati
č
ki uslovi ravnoteže plo
č
e:
2
cos
cos 45
0
A
X
X
F S
α
=
−
−
⋅
° =
∑
.............................................. (a)
1
2
cos
cos
sin 45
0
A
Y
Y
S
S
β
α
=
+
−
⋅
° =
∑
........................................ (b)
2
1
3
sin
sin
0
A
Z
Z
G S
S
S
α
β
=
−
−
−
−
=
∑
........................................ (c)
1
3
cos
2
2
0
2
x
A
a
M
G
S
a
S a Y
a
β
=
⋅
+
⋅
+
⋅ +
⋅
=
∑
.......................... (d)

347
10-LAN
Č
ANICE
LAN
Č
ANICE
Uže, lanac ili kabl koje je obješeno na krajevima i nosi teret uklju
č
uju
ć
i
i svoju težinu zove se lan
č
anica. Lan
č
anice su važni elementi i koriste se
kao nose
ć
i elementi vise
ć
ih mostova, obješenih cjevovoda, za
pridržavanje visokih objekata (tornjeva, antenskih stubova, dimnjaka) i
elektri
č
ni vodovi optere
ć
eni sopstvenom težinom. Zavisno od
optere
ć
enja koje nose dijele se u dvije osnovne grupe:
−
lan
č
anice opere
ć
ene koncentrisanim silama,
−
lan
č
anice optere
ć
ene kontinuiranim optere
ć
enjem.
10.1 Lan
č
anice optere
ć
ene koncentrisanim
silama
Kod lan
č
anica treba odrediti za praksu važne podatke, a to su:
−
odnos izme
đ
u sila i raspona,
−
veli
č
ina progiba,
−
zavisnost tih veli
č
ina od dužine lan
č
anice.
Slika 10.1 Lan
č
anica optere
ć
ena koncentrisanim silama
Y
A
X
A
F
A
Y
E
X
E
F
3
F
1
F
2
F
E
x
x
B
x
C
x
D
A
B
C
D
E
α
β
δ
γ
y
L
h
α
β
348
STATIKA
Na na
č
in kako se tretiraju ove lan
č
anice, može se tretirati i lan
č
anica
optere
ć
ena sopstvenom težinom, ako se ista zamijeni dovoljnim brojem
koncentrisanih sila.
Neka je lan
č
anica optere
ć
ena koncentrisanim silama
G
1
F
i
G
2
F
na
mjestima B i C sa poznatim koordinatama
x
B
i
x
C
.
Poznato je
L
i
h
koji
odre
đ
uju položaj ta
č
aka A i E. Traže se
y
B
i
y
C
, tj oblik lan
č
anice zbog
dimenzionisanja zatezne sile na svakom segmentu AB i BC.
Ako je lan
č
anica idealno savitljiva, svaki njen segment nalazi se pod
dejstvom sila na krajevima i te
ć
e sile imati pravce segmenata. Isto važi i
za krajnje segmente, pa su sile u tim segmentima jednake reakcijama
oslonaca u ta
č
kama A i E tj. sila u dijelu AB je
G
A
F
, a sila u dijelu DE je
G
B
F
.
Ravni sistem sila nije odre
đ
en jer se mogu postaviti tri jedna
č
ine,a
postoje
č
etiri nepoznate, a to su
G
A
F
,
G
B
F
,
α
i
β
nagibi lan
č
anice, jer je
oblik deformisane lan
č
anice nepoznat. Zato je sile
G
A
F
i
G
B
F
lakše
predstaviti preko njihovih komponenata
X
A
, Y
A
, X
E
,
Y
E
pri
č
emu je:
X
A
=
F
A
cos
α
i
Y
A
=
F
A
sin
α
.
Problem je stati
č
ki rješiv samo ako je poznat još jedan podatak (npr.
odnos sila ili ugao
α
ili
β
). Naj
č
eš
ć
e se propisuje ugib tj. koordinata
jedne ta
č
ke lan
č
anice. Ako je naprimjer unaprijed poznata koordinata
y
C
ta
č
ke C, te ako se posmatra ravnoteža samo sa jedne strane od te
ta
č
ke, problem je stati
č
ki odre
đ
en.
Slika 10.2 Ravnotežni položaj lijevog dijela
lan
č
anice
S
CD
Y
A
X
A
F
1
F
2
x
x
B
x
C
A
B
C
α
δ
γ
y
α
y
C

350
STATIKA
10.2.1 Lan
č
anice sa proizvoljno-kontinuiranim
optere
ć
enjem
Slika 10.3 Lan
č
anica sa proizvoljno-
kontinuiranim optere
ć
enjem
Ta
č
ka C je najniža, a ta
č
ka D(x,y) je proizvoljna. Optere
ć
enje
q
(
x
) je u
N/m.
Slika 10.4 Ravnoteža dijela CD lan
č
anice
Ako se posmatra ravnoteža dijela CD lan
č
anice, na njega djeluju sile
C
S
G
,
S
G
i sila
Q
G
. Pravci te tri sile sijeku se jednoj ta
č
ki T prema teoremi
o tri sile. Iz ravnoteže su
č
eljnog sistema sila slijedi:
x
y
C
D
B
A
S
C
S
x
y
C
D
T
Q
x
y
x
T
α
α
351
10-LAN
Č
ANICE
α
=
−
=
∑
0
cos
0
C
X
S
S
...............................................................(10.7)
α
=
−
=
∑
0
sin
0
Y
S
Q
.................................................................(10.8)
α
=
cos
C
S
S
....................................................................................(10.9)
α
=
sin
Q S
....................................................................................(10.10)
Ako se jedna
č
ine (10.9) i (10.10) podijele dobiva se:
α
α
=
sin
cos
C
S
Q
S
S
.................................................................................(10.11)
α
=
=
−
C
T
Q
y
tg
S
x x
.........................................................................(10.12)
Sa slike je:
α
=
−
T
y
tg
x x
i ugao odre
đ
uje oblik lan
č
anice.
Ako se jedna
č
ine (10.9) i (10.10) kavadriraju i saberu dobiva se:
α
α
+
=
+
=
+
2
2
2
2
2
2
2
2
2
cos
sin
C
C
S
S
S
Q
S
S
Q
.......................................................(10.13)
S
je najve
ć
a sila jer ima najve
ć
i nagib u odnosu na horizontalu.
Jedna
č
ine važe za sve lan
č
anice optere
ć
ene proizvoljnim kontinuiranim
optere
ć
enjem. Horizontalna projekcija zatezne sile je
C
S
G
, a vertikalna
projekcija zatezne sile jednaka je ukupnom kontinuiranom optere
ć
enju
izme
đ
u ta
č
ke C i posmatranog presjeka. Sila u lan
č
anici je najmanja u
njenoj najnižoj ta
č
ki C, a najve
ć
a je u jednom od mjesta vješanja A ili B.
Kao i prethodnom slu
č
aju lan
č
anica je stati
č
ki neodre
đ
ena i za rješenje
problema treba jedan dodatni podatak. To je obi
č
no ugib.

353
10-LAN
Č
ANICE
C je proizvoljna najniža ta
č
ka i koordinatni po
č
etak. D(x;y) je proizvoljna
ta
č
ka. Sila
Q
=
q
⋅
x
prolazi kroz ta
č
ku T(
x
/2,0).
α
α
=
−
= ⇒
=
∑
0
cos
0
cos
C
C
X
S
S
S
S
................................(10.14)
α
α
=
−
= ⇒
=
= ⋅
∑
0
sin
0
sin
Y
S
Q
S
Q
q x
..........................(10.15)
Kavadriranjem i sabiranjem izraza (10.14) i (10.15) dobiva se:
α
α
+
=
+
2
2
2
2
2
2
2
cos
sin
C
S
S
S
q x
=
+
2
2
2
C
S
S
q x
.............................................................................(10.16)
α
=
=
=
2
C
C
Q
qx
y
tg
x
S
S
⋅
⋅
=
⇒ =
2
2
2
C
C
q x
y
q x
y
S
x
S
..................................................................(10.17)
Dobivena je jedna
č
ina kvadratne parabole sa tjemenom u ta
č
ki C. Ako
su ovješenja lan
č
anice na razli
č
itim visinama tj. ako je
h
≠
0, tada je
položaj koordinatnog po
č
etka tj. ta
č
ke C nepoznat i nepoznate su
koordinate ta
č
aka
x
A
, y
A
, x
B
, y
B
.
354
STATIKA
10.2.3 Obi
č
ne lan
č
anice
Lan
č
anica koja je uniformno optere
ć
ena po dužini svoga luka zove se
obi
č
na lan
č
anica.
Slika 10.7 Obi
č
na lan
č
anica
Slika 10.8 Ravnoteža dijela CD lan
č
anice
Ako se posmatra ravnoteža dijela CD obi
č
ne lan
č
anice onda je sila
G
Q
,
kojom se zamjenjuje kontinuirano optere
ć
enje, proporcionalna dužini
x
y
B
A
a
C
D
L
O
S
C
S
y
C
D
T
Q
α
α
x
a
O
s

356
STATIKA
gdje je
=
C
S
a
q
parametar lan
č
anice
. On ima dimenziju dužine i
predstavlja vertikalno rastojanje najniže ta
č
ke C lan
č
anice od
koordinatnog po
č
etka O.
Ako se jedna
č
ina (10.21') diferencira po
x
dobije se:
+
=
=
⎛
⎞
=
+ ⎜
⎟
⎝
⎠
2
2
2
2
2
2
2
1
1
1
1
dx
dy
d y
ds
d x
a dx
a
dx
d y
dy
d x
a
dx
.......................................................... (10.24)
Rješenje ove diferencijalne jedna
č
ine obi
č
ne lan
č
anice, koje istovremeno
zadovoljava i uslov da je
y=a
za
x=
0
,
je:
= ⋅
x
y a ch
a
.................................................................................. (10.25)
Ovo je jedan
č
ina obi
č
ne lan
č
anice, a iz jedna
č
ine se može izvesti i izraz:
S = q
⋅
y ...................................................................................... (10.26)
To je sila u užetu u bilo kojem presjeku obi
č
ne lan
č
anice i
proporcionalna je kordinati
y
tog presjeka.
357
11-METOD VIRTUALNIH POMJERANJA
METOD VIRTUALNIH
POMJERANJA
Ovaj metod ima nekih prednosti nad klasi
č
nim pristupom. Susreš
ć
emo
se sa pojmom rada sile, mogu
ć
eg pomjeranja i stepena slobode
kretanja.
11.1 Rad sile
Na pokretno tijelo u ta
č
ki A
č
iji je položaj odre
đ
en vektorom
G
r
(x,y,z)
djeluje sila
G G G G
( , , )
F X Y Z
.
Neka se ta
č
ka A pomjeri za veli
č
inu
G
dr
u novi
položaj A
1
tako da je:
= +
JG
G
G
1
r
r dr
.......................................................................................(11.1)
Skalarni proizvod:
=
⋅
JG
G
dA
F dr
definiše elementarni rad sile
G
F
na
pomjeranju
G
dr
α
=
⋅
⋅
cos
dA
F dr
...........................................................................(11.2)
Ugao
α
zatvaraju vektori
G
F
i
G
dr
.
Slika 11.1 Rad sile F na
pomjeranju dr
dr
x
y
z
α
A
A
1
F
r
r
1
=r+dr

359
11-METOD VIRTUALNIH POMJERANJA
=
=
+
+
⋅
⋅ +
⋅ +
⋅
G
G
G
G
G
G
G
G
(
) (
)
dA
Fdr
Xi Yj
Zk
dx i
dy j dz k
...............................(11.5)
=
⋅ ⋅ +
⋅ ⋅ +
⋅ ⋅ +
⋅ ⋅ +
⋅ ⋅ +
⋅ ⋅ +
⋅ ⋅ +
⋅ ⋅ +
⋅ ⋅
G G
G G
G G
G G
G G
G G
G G
G G
G G
dA
Xdx i i
Xdy i j
Xdz i k Ydx j i
Ydy j j Ydz j k Zdx k i
Zdy k j
Zdz k k
....................(11.6)
Skalarni proizvod dva okomita vektora je nula.
=
+
+
dA
Xdx Ydy Zdz
.....................................................................(11.7)
Elementarni rad sile F jedank je algebarskom zbiru elementarnih
radova njenih komponenata na odgovaraju
ć
im projekcijama
elementarnog pomjeranja.
(
)
=
=
=
+
+
∫
∫
∫
G G
A
dA
Fdr
Xdx Ydy Zdz
.........................................(11.8)
pri
č
emu se integracija vrši po putanji napadne ta
č
ke sile izme
đ
u
po
č
etnog i krajnjeg položaja ta
č
ke.
Jedinica za rad je Mm=J (džul) kao i za energiju.
11.2 Rad sprega sila
Ako na tijelo djeluje spreg sila i ako se želi odrediti rad para sila koje ga
č
ine na elementarnom pomjeranju njihovih napadnih ta
č
aka, traži se
rad para sila, a ne rad svake pojedina
č
ne sile.
Slika 11.3 Rad sprega sila
Na kruto tijelo u ta
č
kama A i B djeluju sile
G
F
i
G
'
F
koje
č
ine spreg sila:
M = F
⋅
h
........................................................................................(11.9)
Neka su ta
č
ke A i B pomjerene u njima bliske položaje A
1
i B
1
. Takvo
kretanje može se predstaviti kao zbir translacije do položaja A
1
B' i
rotacije oko ose kroz ta
č
ku A
1
za ugao d
ϕ
. U prvoj fazi (translaciji) svaka
ta
č
ka tijela
ć
e se pomjeriti za isti iznos
G
1
dr
te je
G
2
'
dr
=
G
1
dr
. Rad obje sile
na tom pomjeranju jednak je nuli.
dr
1
dr
1
F'
d
ϕ
A
B
F
B'
B
1
A
1
dr
2
'=
dr
2
''
h
360
STATIKA
=
+
= − ⋅
+
= − ⋅
+ ⋅
=
JG
G
JG
G
JG
G
G
G
1
1
1
1
2
2
'
'
0
dA
dA
dA
F dr
F dr
F dr
F dr
................ (11.10)
U drugoj fazi rotacije (rotacije) ta
č
ka A
1
miruje te je rad sile
G
F
jednak
nuli, dok je rad sile
G
'
F
istovremeno jednak radu sprega i iznosi:
ϕ
=
⋅
=
⋅ ⋅
JG
G
2
'
''
dA
F dr
F h d
............................................................... (11.11)
ϕ
=
⋅
dA
M d
................................................................................. (11.12)
gdje je d
ϕ
elementarni ugao zakretanja krutog tijela (u radijanima).
Ukupan rad sprega sila na kona
č
noj rotaciji je
ϕ
=
∫
dA
Md
................................................................................. (11.13)
11.
3
Pojam stepena slobode kretanja
Broj stepeni slobode kretanja nekog sistema jedank je broju nezavisnih
mogu
ć
ih (virtualnih) pomjeranja sistema.
Npr. kuglica- materijalna ta
č
ka koja se slobodno kre
ć
e u prostoru ima 3
stepena slobode kretanja, jer su nezavisna tri od beskrajno mnogo
virtualnih pomjeranja. To su tri pomjeranja u pravcu koordiantnih osa i
svako drugo virtualno pomjeranje može se ostvariti preko ta tri
pomjeranja. Ako se kre
ć
e u ravni, materijalna ta
č
ka ima 2 stepena
slobode kretanja.
Kruto tijelo koje se obr
ć
e oko ose ima 1 stepen slobode kretanja. Kruto
tijelo koje vrši proizvoljno ravno kretanje – knjiga na stolu ima 2
translacije i jednu rotaciju okomitu na ravan kretanja. Slobodno kruto
tijelo ima šest stepeni slobode: 3 translacije i 3 rotacije.
Broj stepeni slobode kretanja odre
đ
uje se na sljede
ć
i na
č
in: Ako se
sistem kre
ć
e, pa se onemogu
ć
i translacija u jednom pravcu ili rotacija
oko jedne ose bilo kog dijela tog sistema i ako se pri tom cijeli sistem
zaustavi, on tada ima 1 stepen slobode kretanja. Ako se poslije toga
drugi dijelovi sistema mogu kretati, postupak se ponavlja i zaustavlja se
translacija ili rotacija nekog drugog dijela sistema. Ako se cijeli sistem
zaustavi on ima 2 stepena slobode kretanja. Ako se ni tada ne zaustavi,
onda on ima više od dva stepena i postupak se ponavlja dok se potpuno
ne zaustavi svako kretanje.

362
STATIKA
Ako je ta
č
ka u ravnoteži
G
R
F
=0 pa je i
δ
A
=0. Isto tako, da bi bilo
δ
A
=0
mora za proizvoljni
δ
r
biti
G
R
F
=0 tj. sistem je u ravnoteži pa zna
č
i da važi
i obratno.
Ako je u pitanju kruto tijelo, princip virtualnog pomjeranja glasi:
Da bi kruto tijelo (sistem) bio u ravnoteži potrebno je da je suma radova
svih spoljašnjih sila, koje djeluju na to tijelo (sistem), jednaka nuli na
svakom mogu
ć
em pomjeranju tog tijela (sistema).
Ako je neka ta
č
ka ili kruto tijelo u ravnoteži, analiti
č
ki oblik principa
virtualnog pomjeranja, koji predstavlja uslov ravnoteže je:
(
)
δ
δ
α
=
=
∑
cos
0
i
i
i
A
F r
............................................................... (11.16)
(
)
δ
δ
δ
δ
=
+
+
=
∑
0
i
i
i
i
i
i
A
X x
Y y
Z z
............................................... (11.16')
Ova jedna
č
ina zove se opšta jedna
č
ina statike. Jedan
č
ina (11.16) je
pogodna kad se virtualno pomjeranje odre
đ
uje geometrijskim putem, a
jedna
č
ina (11.16') kad se odre
đ
uje analiti
č
ki. U tom slu
č
aju se svaka
sila predstavi preko projekcije na ose, a virtualna pomjeranja
δ
x
i
,
δ
y
i
,
δ
z
i
se odrede diferenciranjem koordinate napadne ta
č
ke odgovaraju
ć
e i-te
sile.
Rješavanje zadataka statike metodom virtualnih pomjeranja
Redoslijed je sljede
ć
i:
1.
Odabrati sistem i nacrtati odgovaraju
ć
e spoljašnje sile.
2.
Provjeriti koliko stepeni ima doti
č
ni sistem.
Ako sistem ima 1 stepen postupak je:
3.
Dati mogu
ć
e pomjeranje jednom dijelu sistema (translacija ili
rotacija) i izraziti pomjeranja napadnih ta
č
aka svih sila, koje vrše
rad, u zavisnosti od tog pomjeranja.
4.
Izra
č
unati agebarski zbir radova svih sila na mogu
ć
im pomjeranjima
njihovih napadnih ta
č
aka (izraženih preko jednog mogu
ć
eg
pomjeranja) i tu sumu izjedna
č
iti sa nulom.
5.
Eliminisati mogu
ć
e pomjeranje i rješiti jedna
č
inu.
Ako sistem ima 2 ili više pomjeranja:
3.
Odabrati sistem i nacrtati spoljašnje sile.
4.
Provjeriti koliko stepeni slobode ima sistem.
5.
Izabrati onoliko nezavisnih mogu
ć
ih pomjeranja koliko sistem ima
stepeni slobode kretanja.
363
11-METOD VIRTUALNIH POMJERANJA
6.
Dati mogu
ć
e pomjeranje koje odgovara jednom stepenu slobode
kretanja, pri
č
emu se ostala mogu
ć
a pomjeranja, koja odgovaraju
ostalim stepenima slobode kretanja, smatraju jednakim nuli. Izraziti
mogu
ć
e pomjeranje svih spoljašnjih sila koje vrše rad u zavisnosti
od tog mogu
ć
eg pomjeranja.
7.
Izra
č
unati algebarski zbir radova svih sila na prvom mogu
ć
em
pomjeranju, izjedna
č
iti ga sa nulom i eliminisati to mogu
ć
e
pomjeranje.
8.
Ponoviti radnje za sljede
ć
e nezavisno virtualno pomjeranje onoliko
puta koliko sistem ima stepeni slobode kretanja i tako dobiti isto
toliko jedna
č
ina ravnoteže.
9.
Riješiti sistem jedna
č
ina.
Primjer 11.1
Na sistem djeluju spoljašnje sile. Homogeno fizi
č
ko
klatno, težine
G
, održava se u ravnotežnom položaju tako što na njega
djeluje spreg sila momenta
M
. Kolika je vrijednost tog sprega za slu
č
aj
da je
α
=30
°
.
Slika 11.6 Homogeno klatno
Rješenje:
Klatno ima jedan stepen slobode kretanja. Ako mu se saopšti virtualno
ugaono pomjeranje
δα
, rad
ć
e vršiti samo
G
G
i
M
. Rad sila
G
A
X
i
G
A
Y
je
nula, jer se ta
č
ka A kod takvog virtualnog pomjeranja ne
ć
e pomaknuti.
Rad sile
G
G
na mogu
ć
em pomjeranju napadne ta
č
ke T:
δ
δ
α δ
=
= −
⋅
G
G
1
sin
T
T
A
G
r
G
r
.................................................................(a)
δ
δα
= ⋅
T
r
a
......................................................................................... (b)
α
x
y
δα
A
M
G
δ
r
T
T
Y
A
X
A
a
a

365
11-METOD VIRTUALNIH POMJERANJA
Slika 11.7 Ram
Rješenje:
Odre
đ
ivanje reakcije
X
A
Slika 11.8 Odre
đ
ivanje reakcije
G
A
X
Uslov ravnoteže rama je da je suma virtualnih radova jedanka nuli:
δ
α δ
δα
⋅
−
⋅
+
=
sin
0
A
A
A
X
r
F
r
M
...........................................................(a)
δ
δ
δ
δα
α
=
=
=
⋅
2
3
2
3 cos
C
C
A
r
r
r
DC
a
a
.......................................................... (b)
a
F
α
A
B C
D
X
D
Y
D
X
A
Y
A
α
M=3Fa/2
a
2a
√
3
Y
D
Y
A
2a
√
3
a
F
α
A
B
C
D
X
D
X
A
α
M=3Fa/2
a
δ
r
B
=
δ
r
A
δ
r
A
δ
r
A
δ
r
C
366
STATIKA
δ
δ
α δ
α
⋅
−
⋅
+
=
⋅
sin
0
2
3 cos
A
A
A
A
r
X
r
F
r
M
a
........................................... (c)
Odakle se za
α
=30
°
i
M=3Fa/2
dobije
X
A
=0.
Odre
đ
ivanje reakcije
Y
A
Slika 11.9 Odre
đ
ivanje reakcije
G
A
Y
Ta
č
ka B se mora pomjeriti za
δ
δ
=
G
G
B
A
r
r
jer je poluga kruta. Ta
č
ka C se
mora kretati po krugu sa centrom u D. S druge strane, njena projekcija
na pravac BC mora biti jedanka projekciji virtualnog pomjeranja ta
č
ke
B na taj pravac. Ova posljednja projekcija jednaka je nuli, jer je
δ
G
B
r
okomito na pravac BC. Zaklju
č
ak je da je
δ
G
C
r
= 0, te se ni poluga DC
ne
ć
e obrtati i rad sprega
M
jednak je nuli. Zato rad vrše samo sile
G
A
Y
i
G
F
, a opšte jedan
č
ine statike su:
δ
α δ
−
⋅
=
cos
0
A
A
A
Y r
F
r
....................................................................... (d)
α
=
=
3
cos
2
A
F
Y
F
............................................................................. (e)
Odre
đ
ivanje reakcije
X
D
Poluzi DC saopšti se virtualno translatorno pomjeranje:
δ
δ
=
G
G
D
C
r
r
. Pri
translaciji te poluge, ona se ne obr
ć
e pa je rad sprega
M
jednak nuli.
Y
D
Y
A
2a
√
3
a
F
α
A
B
C
D
X
D
X
A
α
M=3Fa/2
a
δ
r
B
δ
r
A

368
STATIKA
Oslonac se u
č
ini pokretnim u vertikalnom pravcu i saopšti mu se
translacija:
δ
δ
=
G
G
D
C
r
r
. Štap se u tom slu
č
aju ne obr
ć
e. Rad sprega
M
je
jednak nuli.
Pošto projekcije pomjeranja ta
č
aka B i C na pravac BC moraju biti iste,
a pomjeranje
δ
G
B
r
,
ako postoji, mora biti horizontalno jer se ta
č
ka B
kre
ć
e po kružnici sa centrom u A, pa je
δ
G
B
r
=0, tj.
ta
č
ka B se ne
pomjera. Zna
č
i rad vrši samo sila
G
D
Y
i opšta jedna
č
ina statike glasi:
δ
=
0
D
D
Y r
............................................................................................(h)
=
0
D
Y
.................................................................................................. (i)
Primjer 11.3
Za gredu na slici sa zglobom u ta
č
ki B odrediti reakciju
oslonca C.
Slika 11.12 Greda sa Gerberovim zglobom
Rješenje:
Oslonac C se ukloni i doda se sila
G
C
F
. Sistemu se daju virtualna
pomjeranja, koje dozvoljavaju preostale veze.
Slika 11.13 Virtualna pomjeranja grede
Rad reakcija
G
A
F
i
G
D
F
jednak je nuli. Reakcija
G
A
F
je okomita na mogu
ć
e
pomjeranje:
A
B
F
1
F
2
D
C
a
a
a
2a
a
Y
D
F
A
X
D
A
B
F
1
F
2
D
C
a
δ
r
B
δ
r
1
δ
r
C
δ
r
2
δ
r
A
F
C
369
11-METOD VIRTUALNIH POMJERANJA
δ
δ
δ
=
⋅
=
⋅
° =
JG
JJG
cos 90
0
A
A
A
A
A
A
F
r
F
r
........................................................(a)
Reakcija
G
D
F
napada nepomi
č
nu ta
č
ku.
Opšta jedan
č
ina statike je:
δ
δ
δ
δ
=
+
+
1
2
3
A
A
A
A
........................................................................... (b)
δ
A
1
je rad sile
F
1
,
δ
A
2
je rad sile
F
2
,
δ
A
3
je rad sile
F
3
.
δ
δ
δ
δ
= − ⋅
+
⋅
−
⋅
=
1
1
3
2
2
0
C
A
F
r
F
r
F
r
........................................................(c)
Sva pomjeranja mogu se izraziti preko jednog pomjeranja, npr.
δ
r
B
. Iz
trouglova slijedi:
δ
δ
δ
δ
δ
=
=
=
2
1
2
4
3
C
B
B
r
r
r
r
r
a
a
a
a
a
.............................................................. (d)
odakle je
δ
δ
δ
δ
δ
δ
⋅
=
=
=
1
2
3
2
4
4
B
B
B
C
r
r
r
r
r
r
................................................(e)
Kada se izrazi (e) uvrste u jedna
č
inu (c) dobiva se vrijednost reakcije F
C
:
δ
δ
δ
δ
− ⋅
+
⋅
−
⋅
=
1
2
3
0 / :
2
4
4
B
B
B
C
B
r
r
r
F
F
F
r
.............................................. (c')
−
+
−
=
2
1
3
0
2
4
4
C
F
F
F
............................................................................. (c'')
(
)
+
=
1
2
2
3
C
F
F
F

LITERATURA
1. Zaimovi
ć
-Uzunovi
ć
N.,
Zbirka riješenih zadataka iz Mehanike
I -
Statika
, Mašinski fakultet, Zenica, 1988.
2. Zaimovi
ć
-Uzunovi
ć
N., Hodži
ć
N.,
Statika - Programi i uputstvo za
izradu programa
, Zenica, 1996.
3. Vukojevi
ć
D., Zaimovi
ć
-Uzunovi
ć
N., Dolo
č
ek V., Karabegovi
ć
I.,
Martinovi
ć
D., Blagojevi
ć
D., Šimun B., Kudumovi
ć
Dž., Bijelonja I.,
Elastostatika I
, Tehni
č
ki fakultet, Biha
ć
, 2004.,
4. Paši
ć
H.,
Statika
, Svjetlost, Sarajevo, 1985.
5. Karabegovi
ć
I.,
Statika
, Tehni
č
ki fakultet, Biha
ć
, 1998.
6. Mi
ć
unovi
ć
M., Koji
ć
M.,
Statika
, Nau
č
na knjiga, Beograd, 1983.
7. Golubovi
ć
D., Koji
ć
M., Savi
ć
M.,
Metodi
č
ka zbirka zadataka iz
mehanike - Statika,
Nau
č
na knjiga, Beograd, 1982.
8. Mufti
ć
O.,
Mehanika I –Statika,
Tehni
č
ka knjiga, Zagreb, 1995.
9. Bazjanac, D.,
Zbirka zadataka iz tehni
č
ke mehanike - Statika
,
Sveu
č
ilište u Zagrebu, Zagreb, 1967.
10. Rusov L.,
Mehanika-Statika
, Nau
č
na knjiga, Beograd, 1980.
11. Mateji
č
ek, F., Semenski, D., Vnu
č
ec, Z.,
Uvod u Statiku sa zbirkom
zadataka
, Golden marketing – Tehni
č
ka knjiga, Zagreb, 2005.
12. Muj
č
i
ć
H., Terzi
ć
N.,
Mehanika I - Statika
, Gra
đ
evinski fakultet,
Sarajevo, 2000.
13. Kiri
č
enko A.,
Tehni
č
ka mehanika - I dio - Statika
, Gra
đ
evinski
institut Zagreb, 1990.
14. Mateji
č
ek, F., Vnu
č
ec, Z.,
Elektroni
č
ki udžbenik MZT RH – 2002-
027
, Zagreb, 2003: http://www.sfsb.hr/ksk/statika (Dio: Statika)
15. Blagojevi
ć
D., Vujoševi
ć
L.,
Zbirka rešenih zadataka iz Statike
,
Nau
č
na knjiga, Beograd, 1974.
16. Voronkov M.,
Teorijska mehanika
, Mašinski fakultet, Beograd,
1981.
17.
Đ
uri
ć
S.,
Mehanika I - Statika
, Mašinski fakultet, Beograd, 1973.
18. Timošenko S., Jang D. H.,
Tehni
č
ka mehanika
, prevod s engleskog,
Gra
đ
evinska knjiga, Beograd, 1962.
19. Kuzmanovi
ć
D., Cvetkovi
ć
P., Vukobrat M., Kastratovi
ć
G., Živkovi
ć
M.,
Statika
, Gra
đ
evinski fakultet Univerziteta u Beogradu, 2003.
20. Beer F., Johnston R., Eisenberg E.,
Vector mechanics for engineers
– Statics,
Mc Graw Hill, 2004.
21. Bassin M., Brodsky S., Wolkoff H.,
Statics and strength of
materials
,
,
Mc Graw Hill, 1979.
22. Hibeler R. C.,
Engineering mechanics – Statics
, Pearson Prentice
Hall, 2004.
23. Pratap R., Ruina A.,
Statics and Dynamics,
Oxford University Press,
2001.
24. Hall A. S., Archer F. E., Gilbert R. I.,
Engineering Statics
, New
South Wales University Press, 1999.
25. Tozeren A.,
Human Body Dynamics
, Springer, 1999.
26. Meriam J. L., Kraige L. G.,
Engineering mechanics, Statics
, Wiley,
2001.