UNIVERZITET U SARAJEVU
GRAĐEVINSKI FAKULTET
ODSJEK ZA GEODEZIJU
UPOTREBA TEHNOLOGIJE TLS U
MEDICINI I FORENZICI
Anesa Lavić
Džejlana Kalbić
Sarajevo, maj 2016.
Dženana Veladžić
4
1.
LASERSKO SKENIRANJE
Opisivanje trodimenzionalnih svojstava realnih objekata u našem okruženju, te njihova
pohrana u digitalnom obliku, postali su stvarnost u mnogim područjima ljudske aktivnosti.
Osim toga, stalni napredak računarske tehnike i njena sve šira rasprostranjenost dovode do
potražnje za sve većom količinom kvalitetnih i detaljnih podataka naročito o prostoru ljudske
aktivnosti i objektima koji ih okružuju. S obzirom na njihovu kompleksnost prije svega u
geometrijskom smislu, za kvalitetno opisivanje je potrebna izuzetno velika količina mjerenih
podataka. Toliku količinu podataka ne bi bilo moguće prikupiti dovođenjem mjerne naprave u
fizički kontakt sa objektom, za svaku mjerenu tačku. Stoga se već čitavo stoljeće koristi
fotogrametrija kao efikasan i kvalitetan način izmjere bez neposrednog kontakta s objektom.
Zadnjih desetak godina se afirmirala i tehnologija prostornog laserskog skaniranja, kao
potpuno automatizirana i izuzetno efikasna metoda prikupljanja prostornih podataka. Ova
tehnologija se uobičajeno označava pojmom LiDAR od engl.
Light Detection And Ranging
,
iako je bilo sugestija da se uvede pojam LaDAR (eng.
Laser Detection And Ranging
, Wehr &
Lohr 1999.), zbog naglašavanja da se radi o primjeni lasera. Mjerenje laserskim skeniranjem u
načelu je zasnovano rasterskim vođenjem laserske zrake u dva karakteristična smjera
motornim pogonom mehaničkih i optičkih dijelova.
1.1
Princip laserskog skeniranja
Skeniranje se odvija već poznatom polarnom metodom regostracije udaljenosti i ugla od
određene tačke u području snimanja. Rezultat ovakog načina snimanja je je skup
trodimenzionalnih XYZ tačaka koji se naziva oblak tačaka. Prostorna udaljenost između
susjednih snimljenih tačaka unutar oblaka tačaka ovisi o blizini objekta snimanja i tehničkoj
specifikaciji samog instrumenta. Danas je moguće dobiti tačke na snimljenom objektu udaljenje
jedan milimetar. Oblak tačaka može uz svoje prostorne, relativne ili apsolutne koordinate
sadržati i intenzitet RGB ( Red Green Blue) model boje reflektirane površine. To znači da ako se
laserka zraka reflektira od zelenog lista drveta tatačka će uz pripadajuće koordinate sadržati i
podatak o boji i intenzitetu reflektirane zrake. RGB model boje dobiven je unutrašnjom ili
vanjskom kamerom, dok se vrijednost intenziteta dobiva iz jačine odbijenog signala. Digitalnom
5
obradom oblaka tačaka mogu se dobiti raličiti proizvodi, kao što su jednostavnije ili složenije
animacije, vektorski 3D modeli objekata, digitalni ortofoto prikazi fasada i slično.
Budući da se laserskim skrenerom često prikupi i više miliona tačaka po stajalištu, vođenje
detaljne skice je nepotrebno jer se iz oblaka tačaka može dobiti i više nego dovoljno informacija
za identifikaciju svih snimljenih objekata i izradu plana situacije. Kao primjer može poslužiti
zgrada i na zgradi postavljena ploča na kojoj piše ime ulice. Iz oblaka tačaka lako se može
pročitati ime ulice na ploči jer je nekoliko stonina tačaka dobiven oblik i informacija o boji (npr.
bijela slova na zelenoj podlozi).
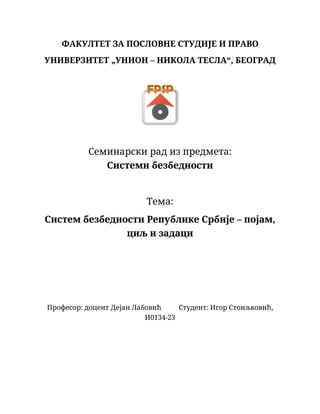
Laserko skeniranje možemo objasniti i grafički uz par koraka. Za primjer ćemo uzeti snimanje
Gradine Hreljin.
Slika br.1: Prednja fasada zvonika na gradini Hreljin
7
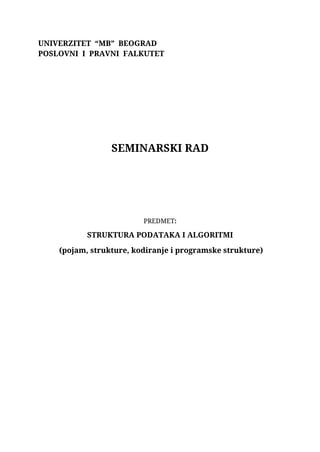
Slika br.4: Grafički prikaz prednje fasade zvonika nakon obrade podataka
2.
TERESTRIČKI LASERSKI SKENERI
Kao što je već rečeno, princip rada laserskih skenera temelji se na određivanju polarnih
koordinata detaljnih tačaka odnosno mjerenju horizontalnog i vertikalnog ugla te udaljenosti
od pojedinih tačaka prostora. Iz niza odaslanih impulsa instrument registruje ukupni broj
pomaka sistema u odnosu na njegov početni položaj te mjeri dužinu do objekta. Za
usmjeravanje laserske zrake koristi se rotirajuće ogledalo ( prizma) koje omugućava njen
otklon u vertikalnom smjeru rotacijom oko horizontalne ose, dok se otklon u horizontalnom
smjeru postiže rotacijom TLS-a oko vertikalne ose. Dužina do objekta određuje se na
različite načine koji se međusobno razlikuju u tačnosti jer su prilagođeni za mjerenja
određenih udaljenosti. Tako postoje skeneri koji su namijenjeni za snimanje zatvorenih
prostora na manje udaljenosti ( do 100m), zatim skeneri koji su pogodni za upotrebu na
terenu i na većim udaljenostima ( preko 100m), te skeneri koji se koriste na udaljenostima do
nekoliko metara uz visoku tačnost snimanja.