Seminarski rad Student, Siniša Puzić
______________________________________________________________________________
1. UVOD U ROBOTIKU
U današnje vreme svet se suočava sa ubrzanim razvojem nauke i tehnike i nalazi se u
jednoj od faza koje često nazivamo fazama revolucionarnih promena. Slične primere
nalazimo i ranije kroz istoriju. Razvoj tehnike i sredstava za proizvodnju nije bio
ravnomeran. Smenjivali su se periodi ubrzanog razvoja i relativne stagnacije.
Najpoznatiji skok u razvoju, poznat pod imenom industrijska revolucija, nastupio je
krajem osamnaestog i početkom devetnaestog veka. Počelo je 1733. godine sa
pojavom mehanizovanog razboja za tkanje. Sledeći veliki pronalazak bila je parna
mašina (1769), a zatim je nastupio buran razvoj tehnike i sredstava za proizvodnju,
odakle je i potekao naziv industrijska revolucija. Istorijski gledano, postoji još niz
pronalazaka i naučnih dostignuća koji su bitno obeležili tehnički razvoj sveta u
određenim periodima. Spomenućemo otkriće i kasnije korišćenje atomske energije,
kao i otkriće tranzistora koji je omogućio nagli razvoj elektronike. Svedoci smo
ubrzanog razvoja nauke i tehnike. Razvoj nauke i novih tehnologija, po mišljenjima
mnogih, nagoveštavaju kvalitativne promene u oblasti proizvodnje i društvu uopšte.
Brzi razvoj računarskih i komunikacionih sistema omogućava izrazito povećanje
protoka informacija, a visoka automatizacija u industriji sve više stavlja čoveka u
položaj samo nadgledanja proizvodnje. Shvativši značaj i perspektive ovih procesa,
razvijene zemlje odvajaju sve veća sredstva za naučnoistraživački rad i razvoj
visokih tehnologija. Naravno, velika ulaganja značajno ubrzavaju procese razvoja.
Izgleda da je opravdano govoriti o novoj tehnološkoj revoluciji i prelasku razvijenih
zemalja u novu eru post-industrijskog društva. Jedan od bitnih činilaca nove
revolucije je fleksibilna automatizacija čiji ne-razdvojni deo predstavljaju robotski
sistemi. Ideja o robotima nastala je prvo u naučnoj fantastici. I danas, u diskusijama
o robotskim sistemima i svemu što oni donose teško možemo izbeći vizije iz oblasti
naučne fantastike. Naravno, na robote danas gledamo mnogo praktičnije, jer nam
stupanj razvoja tehnike to omogućava. To su veoma složeni uređaji koji su se mogli
pojaviti kada su se razvile one grane nauke na kojima se današnja robotika zasniva:
teorija mašina, teorija automatskog upravljanja, računarska tehnika, metode tzv.
veštačke inteligencije, kao i tehnologija senzora i pretvarača. Na robote danas
gledamo kao na uređaje koji omogućavaju dalju i fleksibilniju automatizaciju. Oni
zamenjuju čoveka prvenstveno na opasnim, monotonim i teškim poslovima. Čoveku
ostaju poslovi koji zahtevaju više inteligencije, znanja i kreativnosti. Tako, robotski
sistemi doprinose istovremeno povećanju produktivnosti i huminizaciji rada.
1.
1.1. Zašto roboti?
U ovom odeljku ukazaćemo na neke od oblasti tehnike i proizvodnje čiji je razvoj
bitno uticao na pojavu i usavršavanje robota u tom smislu da su te oblasti tehnike
prosto zahtevale uređaje robotskog tipa.
Sl. 1.1. Kopirajući manipulator
Jedna od takvih oblasti je nuklearna tehnologija. Tu se radi sa radioaktivnim
materijama i u zonama izloženim radijaciji, na primer kod montaže i demontaže
elemenata nuklearnog reaktora ili intervencije u slučajevima havarija na nuklearnim
postrijenjima. Radi rešenja ovih problema razvijeni su prvo kopirajući manipulatori
(sl. 1.1.). Oni su omogućavali da čovek-operator, stojeći u bezbednoj zoni, iza
zaštitnog zida, rukuje radioaktivnim materijama. On svojim rukama vodi takozvani
upravljajući mehanizam manipulatora. Izvršni mehanizam koji se nalazi u opasnoj
zoni kopira to kretanje i tako obavlja željenu radnju.
Za različite složene operacije na nuklearnim postrojenjima kasnije su razvijeni
pokretni manipulatori (na točkovima ili gusenicama) kojima se iz daljine upravljalo
na osnovu televizijske slike snimljene kamerom postavljenom na vozilu (sl. 1.2).
Sličan problem rada u negostoljubivim sredinama javlja se pri ispitivanju podvodnog
sveta na većim dubinama, kao i pri svemirskim istraživanjima. Za ispitivanja u
dubinama okeana konstruišu se specijalna plovila, sa ili bez posade, opremljena
manipulatorima.
2.
Robotski uređaji se već koriste pri istraživanju drugih planeta. Sovjetska sonda
Luna-17 1970. godine iskrcala je na Mesec automatsko vozilo Lunohod-1 koje je
obavilo niz zadataka krećući se po površini Meseca. Američka sonda Viking, koja se
meko spustila na Mars, bila je opremljena manipulatorom koji je uzeo uzorke
Marsovog tla i stavio ih u uređaj za hemijsku analizu. Za razliku od ranije spo-
minjanih manipulatorskih uređaja kojima je neposredno upravljao čovek-operator,
ovakvi uređaji koji se upućuju na druge planete moraju imati veliku samostalnost u
radu zbog složenog problema komunikacije na velikoj udaljenosti.Posebnu važnost u
nastajanju i usavršavanju robota ima mogućnost njihove industrijske primene. Stalna
težnja za povećanjem produktivnosti industrijske proizvodnje vodila je sve većoj
automatizaciji. Čovek je prvo zamenjen na jednostavnim poslovima koje je mogao
obaviti prost industrijski manipulator-automat. To je bilo uglavnom premeštanje
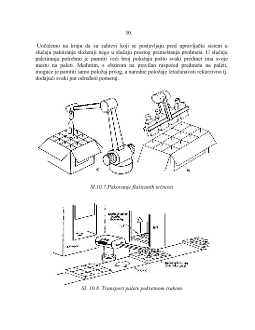
materijala i obrađenih delova, a kasnije i opsluživanje mašina. Na slici 1.3 prikazan
je manipulator koji opslužuje presu. Takav posao je opasan. Može doći do
povređivanja radnika što je još jedan razlog da čovek bude zamenjen na takvim
poslovima. Napretkom nauke i tehnike usavršavali su se i manipulatori i mogli su
obavljati sve složenije poslove. Današnji veoma složeni manipulatori koje nazivamo
robotima obavljaju niz poslova u industriji i već su izgrađene prve potpuno
robotizovane fabrike. Negde se one nazivaju fabrikama bez ljudi, međutim, čovek je
tu prisutan kao kontrolor ali više ne pojedinačnih mašina, već kompletnog procesa
proizvodnje. Posebnu pogodnost robotskih sistema u industriji predstavlja njihova
prilagodljivost-fleksibilnost. Radi se o mogućnosti jednostavnog prelaska sa jednog
posla na drugi, a time i lakog prilagođavanja promenama u proizvodnji. Time su
roboti znatno uticali na formiranje takozvanih fleksibilnih proizvodnih sistema-
proizvodnje koja omogućava brzu promenu asortimana i ekonomičan rad u malim
serijama. Robotski sistemi primenjuju se i u medicini. Medicinska robotika je oblast
koja se odlikuje nizom specifičnosti. Glavna karakteristika medicinskih robota, koja
umnogome određuje celokupan razvoj, je da su ovo jedini robotski uređaji koje
čovek nosi na sebi. Oni ne zamenjuju čoveka na zadatim poslovima, već zamenjuju
ili pokreću delove čovekovog tela u svakodnevnom životu. Ovi uređaji dele se u dve
glavne grupe: proteze i ortoze. Proteze su uređaji koji zamenjuju nedostajuće organe
ili delove tela. Ortoza, pak, ima zadatak da pokrene deo tela koji postoji ali zbog
bolesti ili povrede ne može sam da se pokreće. Proteza mora biti takve konstrukcije
da odgovara obliku dela tela koji zamenjuje. Od nekadašnjih drvenih nogu i kuke
koja je zamenjivala nedostajuću šaku došlo se do nožnih proteza koje pokreću motori
i do veštačkih šaka koje omogućavaju složene pokrete. Na slici 1.4. prikazana je
proteza ruke i veštačka šaka. Dakle, proteza ruke predstavlja, u stvari, specifičan
manipulator. Specifičnost se ogleda u obliku konstrukcije i načinu upravljanja.
4.
Sl. 1.4. Proteza ruke i proteza šake
Savremene ortoze su uređaji koji bolesniku sa nepokretnim pojedinim delovima tela
omogućavaju kretanje i olakšavaju život. Snabdevene su motorima sa posebnim
načinom upravljanja. Moglo bi se reći da ortoza predstavlja spoljašnji skelet za
nepokretni deo tela. Jedna takva ortoza za pokretanje ruke prikazana je na sl. 1.5.
Treba još reći da se u poslednje vreme sa koncepcije spoljašnjeg skeleta, kada god je
to moguće, prelazi na modularni koncept. Prave se ortoze za pojedine delove tela ali
samo onoliko koliko je neophodno, a pri tome se nastoji da se što više iskoriste
postojeće motorne funkcije pacijenta. Sa ovim su tesno povezane i metode takozvane
elektrostimulacije mišića, međutim, to već izlazi iz domena robotike.I sa stanovišta
upravljanja medicinski roboti se odlikuju nizom specifičnosti. Za razliku od
industrijskih robota koji obavljaju periodično ponavljanje određenih radnji,
medicinski roboti treba da se kreću u zavisnosti od čovekove volje. Stoga se istražuje
niz ideja kako da korisnik uređaja nekim voljnim radnjama pokrene protezu ili
ortozu.
5.
noge. Ova potreba uklapala se u Pocetna istraživanja na polju robotike. Naime, prva
naučna istraživanja u robotici počela su kao pokušaji realizacije veštačkog hoda.
Eksperimentisalo se sa četvoronožnim, šestonožnim i osmonožnim mašinama. Bilo
je nekoliko pokušaja da se ovakve eksperimentalne mašine prilagode praktičnoj
primeni. Međutim, u tome se do danas nije uspelo, mada treba reći da je u toku rad
na nekoliko projekata koji tek treba da pokažu rezultate. Jedan od projekata koji
imaju šansu da se potvrde prikazan je na slici 1.6. U pitanju je američki prototip
šestonožnog transportnog vozila. Potrebe za robotskim sistemima znatno su veće
nego što smo ovde mogli prikazati, jer se radi o veoma savremenoj vrsti
automatizacije koja pruža velike mogućnosti. Ovde je bio cilj da se ukaže na osnovna
polja primene robota i na one praktične probleme koji su podstakli razvoj robotike.
1.2. Roboti i naučna fanstatika
U bilo kojoj diskusiji o robotima nezaobilazna tema je naučna fantastika. Za to
postoji dovoljno jak razlog. Gledano kroz istoriju, dobri pisci naučno-fantastične
literature veoma su uspešno predviđali razvoj nauke i tehnike u mnogim oblastima.
Tako je bilo i sa robotikom. Roboti se prvi put pominju oko 1920. godine u naučno-
fantastičnoj drami češkog pisca Karela Čapeka pod nazivom "R.U.R." (Rosumovi
univerzalni roboti); dakle, četrdesetak i više godina pre nego što su se pojavili prvi
stvarni robotski uređaji. Čapek piše o mehaničkim ljudima - robotima koji su
obdareni visokim intelektom i izuzetnim fizičkim sposobnostima. Njegova vizija je
sumorna jer se roboti, konstruisani da zamene žive ljude u fabrikama, oslobađaju
čovekove kontrole i počinju da uništavaju svoga tvorca. Tako je počelo, a kasnije su
slične teme obrađivali nebrojeno puta mnogi pisci naučne fantastike. U diskusiji o
naučnoj fantastici trebalo bi spomenuti i poznatu seriju filmova "Ratovi zvezda" i
robote R2D2 i C3PO koji se u njima pojavljuju (sl. 1.7a1). Pisci naučne fantastike
gledaju na robote različito. Neki ih vide kao uređaje koji će pomoći čoveku,
osloboditi ga svih teških i nezanimljivih poslova i time mu život učiniti lakšim i
kreativnijim. Drugi pisci, pak, u tome vide opasnost i mogućnost da čovek,
oslobođen niza poslova, krene putem negativne evolucije i degeneracije. Nakon ovog
izleta u naučnu fantastiku vratimo se realnosti i na početku pogledajmo šta o zamisli
naučne fantastike ima mogućnosti da se ostvari u skorijoj budućnosti. Uporedićemo
neke od poznatih zamisli sa pojedinim stvarnim projektima. Od ovih stvarnih
projekata neki su doživeli praktičnu primenu, a neki ostali kao eksperimentalni
uređaji. Upoređenje je prikazano na slici 1.7, a čitaocu se ostavlja da zaključi šta je
7.