VIŠA TEHNI
Č
KA ŠKOLA
SUBOTICA
mr. Rozgonji Endre
MEHANIKA
drugi deo
KINEMATIKA
SUBOTICA, 2001. god.
SADRŽAJ
1. UVOD
....................................................................................................................1
2. KINEMATIKA TA
Č
KE
..................................................................................... 2
2.1. Definisanje položaja ta
č
ke u prostoru
................................................ 2
2.1.1.Vektorski postupak................................................................... 2
2.1.2. Analiti
č
ki postupak.................................................................. 3
2.1.3. Prirodni postupak.....................................................................5
2.2. Brzina ta
č
ke
...........................................................................................7
2.2.1. Vektor brzine ta
č
ke..................................................................7
2.2.2. Brzina ta
č
ke u Dekartovom koordinatnom sistemu.................8
2.2.3. Brzina ta
č
ke u prirodnom kooridnatnom sistemu....................9
2.2.4. Hodograf brzine.......................................................................10
2.3. Ubrzanje ta
č
ke
...................................................................................... 11
2.3.1. Vektor ubrzanja........................................................................11
2.3.2. Ubrzanje ta
č
ke u Dekartovom koordinatnom sistemu.............12
2.3.3. Prirodni koordinatni sitem....................................................... 13
2.4. Posebni slu
č
ajevi kretanja ta
č
ke
......................................................... 17
2.4.1. Jednoliko pravolinijsko kretanje ta
č
ke.................................... 17
2.4.2. Jednoliko krivolinijsko kretanje ta
č
ke..................................... 19
2.4.3. Jednako promenljivo pravolinijsko kretanje ta
č
ke.................. 19
2.4.3.1. Jednako ubrzano pravolinijsko kretanje ta
č
ke..........20
2.4.3.2. Jednako usporeno pravolinijsko kretanje ta
č
ke........ 20
2.4.4. Jednako promenljivo krivolinijsko kretanje ta
č
ke...................21
2.4.4.1. Jednako ubrzano krivolinijsko kretanje ta
č
ke...........22
2.4.4.2. Jednako usporeno krivolinijsko kretanje ta
č
ke.........23
2.4.5. Kružno kretanje ta
č
ke.............................................................. 24
2.4.5.1. Jednoliko kružno kretanje ta
č
ke............................... 25
2.4.5.2. Jednako ubrzano kružno kretanje ta
č
ke.................... 26
2.4.5.3. Jednako usporeno kružno kretanje ta
č
ke.................. 27
2.4.6. Harmonijsko kretanje ta
č
ke..................................................... 28
3. KINEMATIKA KRUTOG TELA
......................................................................36
3.1. Translatorno kretanje krutog tela
...................................................... 36
3.2. Obrtanje krutog tela oko nepokretne ose
...........................................39
3.2.1. Ugaona brzina i ugaono ubrzanje............................................ 39
3.2.2. Posebni slu
č
ajevi obrtnog kretanja.......................................... 41
3.2.2.1. Ravnomerno (jednoliko) obrtanje.............................41
3.2.2.2. Ravnomerno promenljivo (jednako promenljivo)
obrtanje.................................................................... 41
3.2.3. Brzine ta
č
aka tela koje se obr
ć
e oko nepokretne ose.............. 42
3.2.4. Ubrzanja ta
č
aka tela koje se obr
ć
e oko nepokretna ose.......... 43
3.3. Ravno kretanje krutog tela
.................................................................. 47
3.3.1. Putanja ta
č
aka tela pri ravnom kretanju...................................48
3.3.2. Brzine ta
č
aka tela koje vrši ravno kretanje..............................49
3.3.2.1. Teorema o projekcijama brzina................................ 51
3.3.3. Trenutni pol brzina...................................................................52
3.3.4. Odre
đ
ivanje brzina ta
č
aka pomo
ć
u trenutnog pola brzina...... 52
3.3.5. Posebni slu
č
ajevi odre
đ
ivanja trenutnog pola brzina.............. 53
3.3.5.1.Ravna figura koja se kotrlja bez klizanja po
nepokretnoj površini drugog tela.............................. 53

1. UVOD
U uvodu prvog dela
mehanike -
statike
izneti su osnovni zadaci mehanike, njen razvoj i podela na
statiku, kinematiku i dinamiku.
Kinematika
prou
č
ava kretanja tela ne uzimaju
ć
i u obzir uzroke (masu i sile) koji izazivaju kretanja.
Ta kretanja tela pri zadatim geometrijskim uslovima prou
č
avaju se u zavisnosti od
vremena
.
Kinematika predstavlja uvod u dinamiku, jer definiše osnovne kinematske zavisnosti, koje su
neophodne za prou
č
avanje kretanja tela pod dejstvom sila. Kinematske metode me
đ
utim imaju i
samostalan prakti
č
ni zna
č
aj, pri prou
č
avanju kretanja delova raznih mehanizama. Upravo zbog
pojave ovih problema u mašinskoj tehnici, kinematika se izdvojila u samostalni deo mehanike u
prvoj polovini 19. veka.
Pod kretanjem se u mehanici podrazumeva promena položaja, koji jedno materijalno telo vrši u
odnosu na drugo, u prostoru.
Za definisanje položaja pokretne ta
č
ke, tela u odnosu na tu ta
č
ku ili tela prema kome se prou
č
ava
kretanje, koristi se
referentni koordinatni sistem,
koji je
č
vrsto vezan za ta
č
ku ili telo u odnosu na
koje se prou
č
ava kretanje. Ukoliko koordinate ta
č
aka izabranog koordinatnog sistema za sve
vreme kretanja ostaju konstantne, tada se telo u odnosu na taj koordinatni sistem nalazi u
mirovanju. Me
đ
utim, ako se koordinate ma koje ta
č
ke tela menjaju tokom vremena, tada se u
odnosu na referentni koordinatni sistem telo kre
ć
e.
Prostor se u mehanici smatra trodimenzionalnim Euklidovim prostorom. Za jedinicu dužine (
L
) pri
merenju rastojanja u ovom prostoru usvaja se
metar
[m]. Vreme (
t
) se u mehanici smatra
univerzalnim, tj. da te
č
e na isti na
č
in u svim koordinatnim sistemima. Za jedinicu vremena uzima
se jedna
sekunda
[s]. Svi kinemati
č
ki elementi, kao što su:
put (trajektorija), brzina i ubrzanje
izražavaju se pomo
ć
u ovih osnovnih jedinica.
Na ovaj na
č
in definisan prostor i vreme izražavaju samo približno realne osobine prostora.
Me
đ
utim, kako pokazuju razni eksperimenti, za realna kretanja koja se pojavljuju u svakodnevnom
životu, a koja se vrše sa mnogo manjim brzinama od brzine prostiranja svetlosti, takvo
približavanje je potpuno opravdano, jer za prakti
č
ne primene daje potpuno zadovoljavaju
ć
u
ta
č
nost.
Vreme u mehanici je pozitivna skalarna veli
č
ina, koja se neprekidno menja. U problemima
kinematike vreme
t
se uzima za nezavisnu promenljivu veli
č
inu. Sve ostale promenljive veli
č
ine u
kinematici se posmatraju u funkciji vremena. Vreme se posmatra uvek od nekog
po
č
etnog trenutka
vremena
(t=0), koje se utvr
đ
uje u svakom konkretnom problemu. Svaki
odre
đ
eni trenutak
vremena t
definiše se brojem sekundi, ra
č
unaju
ć
i od po
č
etnog trenutka vremena. Svaka razlika
izme
đ
u bilo koja dva uzastopna trenutka vremena tokom kretanja, zove se
vremenski interval.
U kinematici se sva razmatranja utvr
đ
uju na osnovu prakti
č
nih iskustava, dok se zaklju
č
ci
potvr
đ
uju eksperimentima. Zbog toga, u kinematici nikakvi dopunski zakoni, ili aksiomi, za
prou
č
avanje kretanja nisu potrebni.
Za definisanje kinemati
č
kih karakteristika nekog kretanja, koje se želi prou
č
iti, neophodno je da
kretanja bude bilo kako definisano (zadato).
Kinemati
č
ki definisati kretanje ili zakon kretanja tela ili ta
č
ke, zna
č
i definisati položaj tog tela ili
ta
č
ke u odnosu na dati referentni koordinatni sistem u bilo kojem trenutku vremena. Najvažniji
zadatak kinematike je utvr
đ
ivanje matemati
č
kih metoda za definisanje tog kretanja.
Po najosnovnijoj podeli kinematika se deli na:
- kinematiku ta
č
ke,
- kinematiku krutog tela.
2. KINEMATIKA TA
Č
KE
U kinematici ta
č
ke rešavaju se dva osnovna problema:
1. Ustanovlajavanje analiti
č
kih postupaka za definisanje kretanja ta
č
ke u odnosu na utvr
đ
eni
koordinatni sistem.
2. Na osnovu zadatog zakona kretanja ta
č
ke, odre
đ
ivanje kinemati
č
kih karakteristika kretanja
ta
č
ke, kao što su:
- trajektorija ta
č
ke,
- brzina ta
č
ke,
- ubrzanje ta
č
ke.
Zamišljena neprekidna linija, koju opisuje pokretna ta
č
ka
M
u prostoru zove se
putanja
ili
trajektorija
ta
č
ke.
Deo putanje izme
đ
u dva uzastopna položaja ta
č
ke
M
je
pre
đ
eni put.
Ukoliko je trajektorija
prava linija
, ta
č
ka vrši
pravolinijsko kretanje
, ako je pak
kriva linija
, ta
č
ka
vrši
krivolinijsko kretanje.
Za definisanje kretanja ta
č
ke u prostoru primenjuju se naj
č
eš
ć
e slede
ć
a tri postupka:
1. vektorski,
2. analiti
č
ki (koordinatni),
3. prirodni postupak.
2.1. DEFINISANJE POLOŽAJA TA
Č
KE
U PROSTORU
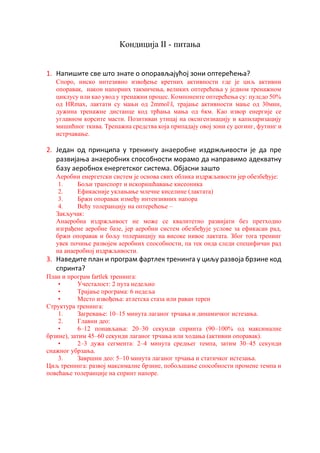
2.1.1. VEKTORSKI POSTUPAK
Položaj ta
č
ke
M
u svakom trenutku
vremena može se odrediti
vektorom
položaja
r
r
u odnosu na po
č
etak
O
Dekartovog koordinatnog sistema, prema
slici 2.1. Pošto je svaki vektor odre
đ
en sa
tri podatka
, za definisanje položaja ta
č
ke
M
potrebno je poznavati
intenzitet,
pravac
i
smer
vektora položaja
r
r
. Pri
kretanju ta
č
ke
M
menja se vektor
r
r
i po
pravcu i po intenzitetu sa vremenom i
predstavlja vektorsku funkciju vremena
t
:
)
(
t
r
r
r
r
=
.
(2.1)
Jedna
č
ina (2.1) predstavlja
zakon
kretanja ta
č
ke u vektorskom obliku.
Pomo
ć
u ove jedna
č
ine mogu
ć
a je
konstrukcija vektora
r
r
u svakom trenutku vremena, i na taj na
č
in da se odre
đ
uje položaj pokretne
ta
č
ke. Geometrijsko mesto krajeva vektora
r
r
odre
đ
uje putanju ta
č
ke
M
.
U posebnom slu
č
aju, kada je
r
r
= const
ta
č
ka se nalazi u mirovanju.
Slika 2.1. Vektorski postupak

x
y
4
3
=
.
Na osnovu ove jedna
č
ine se vidi da je putanja prava linija, koja sa
osom
Ox
zalkapa ugao
a
, pri
č
emu je
4
3
=
α
tg
(slika 2.2).
Primer 2.2.
Kretanje ta
č
ke je dato slede
ć
im jedna
č
inama:
.
t
5
2
sin
10
y
,
t
5
2
cos
10
x
π
π
=
=
Potrebno je odrediti liniju putanje.
Rešenje:
Iz gornjih jedna
č
ina potrebno je eliminisati vreme
t
. Dele
ć
i obe strane jedna
č
ina sa
10
, zatim
dizanjem na kvadrat i sabiranjem se dobija jedna
č
ina:
100
y
x
2
2
=
+
.
Što predstavlja kružnu liniju sa polupre
č
nikom
R=10.
Primer 2.3.
Kretanje ta
č
ke u ravni
Oxy
dato je vektorskom jedna
č
inom oblika:
t
2
cos
c
t
2
sin
b
r
r
r
r
+
=
.
Gde su vektori
c
i
b
r
r
vektori odre
đ
eni koordinatama
)
4
;
3
(
c
),
3
;
2
(
b
r
r
.
Odrediti liniju putanje.
Rešenje:
Gore navedeni vektori predstavljeni pomo
ć
u komponenata imaju oblike:
j
4
i
3
c
;
j
3
i
2
b
;
j
y
i
x
r
r
r
r
r
r
r
r
r
r
⋅
+
⋅
=
⋅
+
⋅
=
⋅
+
⋅
=
,
gde su:
-
j
,
i
r
r
jedini
č
ni vektori koordinatnih osa.
Izjedna
č
avaju
ć
i vrednosti pored istih jedini
č
nih vektora, kretanje je definisano sistemom jedna
č
ina:
t
2
cos
4
t
2
sin
3
y
,
t
2
cos
3
t
2
sin
2
x
+
=
+
=
.
Iz ovih jedna
č
ina potrebno je eliminisati vreme, izražavaju
ć
i vrdenosti:
y
2
x
3
t
2
cos
,
x
4
y
3
t
2
sin
−
=
−
=
.
Dizanjem na kvadrat i sabiranjem jedna
č
ina, dobije se linija putanje u obliku:
0
1
y
13
xy
36
x
25
1
)
y
2
x
3
(
)
x
4
y
3
(
2
2
2
2
=
−
+
−
=
−
−
+
−
.
Što predstavlja jedna
č
inu elipse.
Slika 2.2. Ilustracija primera
2.1