OPŠTI PREGLED I UVOD U TEORIJU SIGNALA I SISTEMA
Teorija, analiza i projektovanje signala i sistema igraju zna
č
ajnu ulogu u gotovo svim
oblastima elektrotehnike kao i u mnogim drugim inženjerskim i nau
č
nim oblastima. Mnogi primeri
elektronskih sistema uklju
č
uju radio i televiziju, telefonske mreže, sonar i radar, navigaciju i
vo
đ
enje, laboratorijsku instrumentaciju, upravljanje industrijskim procesima, biomedicinsku
instrumentaciju, daljinsko ili satelitsko osmatranje, komunikacionu inteligenciju, vojno i vatrogasno
osmatranje, seizmi
č
ku analizu, radio astronomiju i tako dalje. Mnogi primeri mehani
č
kih sistema
podrazumevaju analizu vibracija, prigušenje oscilacija, mikrofone i hidrofone, zvu
č
nike, mera
č
e
ubrzanja i tako dalje. Pod
signalima
podrazumevamo sve ulaze i izlaze, kao i unutrašnje funkcije
koje ovi sistemi obra
đ
uju ili proizvode, kao što su napon, pritisak, pomeraj ili intenzitet. Uglavnom
je nezavisna promenljiva ovih funkcija signala vreme, ali ne mora biti. Ponekada je to odstojanje,
ugao a vrlo
č
esto, kao što je to na primeru slike, u pitanju dvodimenzioni signal po nezavisnim
koordinatama dužine. Jednom re
č
ju, zbog velikog broja razli
č
itih vrsta i raznolikosti prirode
navedenih signala, teško je dati jednu opštu definiciju signala. Nekada se, u nekim od udžbenika
može na
ć
i iskaz da je
signal svaki vremenski promenljivi fizi
č
ki fenomen ili pojava koja sa sobom
nosi informaciju
.
Ovaj iskaz je delimi
č
no ta
č
an, jer vrlo
č
esto pod signalima podrazumevamo i
funkcije koje za nezavisnu promenljivu nemaju vreme, a ponekada kao signale možemo posmatrati
i kompleksne funkcije koje nisu u tesnoj vezi sa fizi
č
kim pojavama. Me
đ
utim, ono što svakako jeste
zajedni
č
ko za sve ono što pod širokim pojmom signala podrazumevamo, je informacija.
Sa istom težinom, sa kojom je teško definisati raznoliki pojam signala, jeste teško i
definisati pojam sistema. Intuitivno podrazumevamo da su sistemi oni subjekti (tehni
č
ki, biološki ili
društveni) koji obra
đ
uju ili proizvode signale. Ovako opšta definicija sistema podrazumeva
č
itave
klase ure
đ
aja, struktura, subjekata (veliki broj drugih imenica se može upotrebiti umesto re
č
i
sistem) kao što su
društveni sistemi
: kapitalisti
č
ki sistem, socijalisti
č
ki sistem, bankarski sistem,
parlamentarni sistem, ekonomski sistem, sistem hartija od vrednosti, sistem obrazovanja, sistem
pravosu
đ
a, pa preko
tehni
č
kih sistema
: televizijski sistem, satelitski sistem, upravlja
č
ki sistem,
mikrofonski sistem, kamera, nadzorni sistem, sistem za gašenje požara, sistem za prenos elektri
č
ne
energije i tako dalje, do
bioloških sistema
kao što su sistem organa za varenje, sistem žlezda sa
unutrašnjim lu
č
enjem, nervni sistem,
č
ulo vida,
č
ulo sluha, miši
ć
ni sistemi, sistemi za regulaciju
temperature kod ptica i tako dalje.
Dakle,
mi
ć
emo se u ovom kursu baviti signalima i sistemima, mada je o
č
igledno da me
đ
u
njima ima mnogo zajedni
č
kih ta
č
aka i preklapanja. Tradicionalno se ovim oblastima u
elektrotehnici bave tehnika komunikacija i upravljanja, ali je opet granica izme
đ
u ove dve oblasti
vrlo nejasna i fluidna. Dok komunikacioni signali moraju biti generisani od strane nekog sistema,
dotle svaki upravlja
č
ki sistem ima svoj ulazni i izlazni signal. Otuda je osnovna namera ovog kursa
da predstavi osnovne koncepte i matemati
č
ke alate koji su od koristi za obe navedene oblasti. Kroz
slede
ć
e pitanje
ć
emo izvršiti osnovnu karakterizaciju signala i sistema i uvesti terminologiju koja
ć
e
nam kroz kasnija poglavlja pomo
ć
i da se lakše razumemo.
Pitanje 1: Osnovne karakteristike i podele signala i sistema
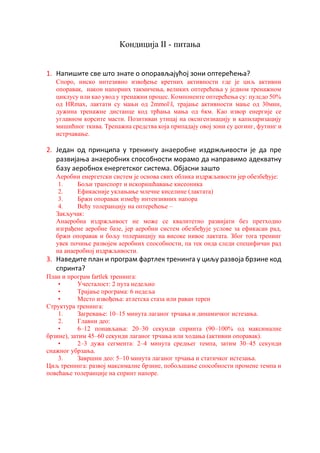
Kao prvi primer signala posmatrajmo dijagram prikazan na slici 1.1. On predstavlja
izmerene padavine u Hidrometeorološkoj stanici ''Kara
đ
or
đ
ev park'' u Beogradu u periodu od 144
dana. Padavine su merene svakoga dana u ovom periodu i izražene su u milimetrima vodenog stuba.
Ovakav dijagram (signal padavina) je od velikog zna
č
aja za veliki broj meteorologa jer im on
pomaže da izvrše vremensku prognozu, inženjera poljoprivrede jer pomo
ć
u njega je mogu
ć
e pratiti i
predvideti razvoj biljnih kultura, važan je i za inžinjere melioracija jer oni mogu pratiti i predvideti
nivo voda u rekama i kanalima za navodnjavanje i odvodnjavanje i tako dalje. Ako bi posmatrali
ovaj dijagram padavina u mnogo dužem periodu, mogla bi se uo
č
iti neka periodi
č
nost u obliku
signala jer jesen i prole
ć
e obiluju mnogo ve
ć
im padavinama nego zima i leto, zatim bi se lako
mogle uo
č
iti sušne godine za razliku od vlažnih godina i tako dalje. Do ovih zaklju
č
aka se može
do
ć
i raznoraznim tehnikama kao što su
usrednjavanje
,
filtracija, spektralna analiza
i sli
č
no.
Slika 1.1: Dijagram padavina u periodu od 144 dana
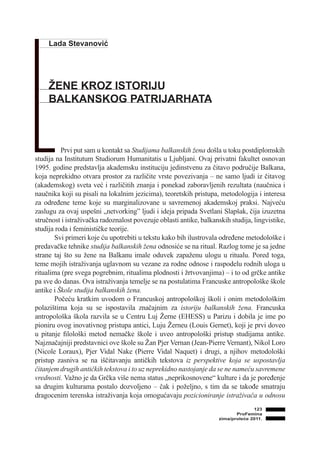
Posmatrajmo sada signal prikazan na slici 1.2 koji predstavlja prose
č
nu vrednost zarade
zaposlenih van privrede u Republici Srbiji u periodu Januar-Decembar 2004. godine (podaci su
izmišljeni).
Slika 1.2: Prose
č
ne zarada zaposlenih tokom 2004. godine
Ovakvi podaci su zanimljivi za ekonomske stru
č
njake, investitore, bankare i tako dalje, jer govore o
ekonomskoj mo
ć
i zaposlenih, njihovoj kreditnoj sposobnosti, ali istovremeno i stanju privrede,
nezaposlenosti i tome sli
č
no. Sa ovog dijagrama se raznoraznim operacijama, kao što je na primer
metod kona
č
nih razlika, može sra
č
unati da li postoji pove
ć
enje industrijske proizvodnje ili možda
smanjenje javne potrošnje.
Tre
ć
i primer je dijagram koji predstavlja aktivnost suna
č
nih pega na suncu. Na slici 1.3. je
prikazana ova aktivnost tokom 18 godina merenja. Interesantno je da ova aktivnost na suncu jeste

Slede
ć
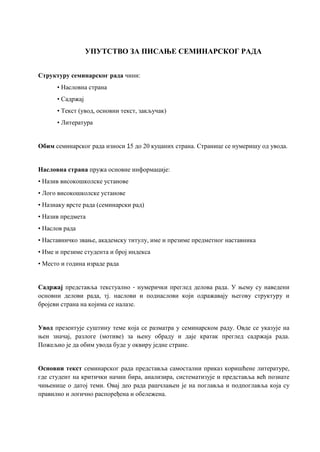
i primer kontinualnog signala je signal ljudskog glasa. Na slici 1.5 je prikazan audio
signal koji je izdvojen iz pesme ''White Flag'', peva
č
ice Dido. Ovaj signal je zapravo signal koji
pokazuje kako se menja i vazdušni pritisak na membranu mikrofona, i otpornost prijemnika u
mikrofonu (ukoliko je u pitanju mikrofon sa promenljivom otpornoš
ć
u), kao i naponski signal koji
se generiše kao izlaz iz mikrofona, i uobi
č
ajeno je podvrgnut ograni
č
enju da se mora nalaziti u
intervalu
[ ]
.
1
,
1
−
Slika 1.5: Snimljeni ljudski glas
Primetimo da je oblik ovog signala prili
č
no periodi
č
an jer se pikovi (izraženi maksimumi) u
snimljenom glasu pojavljuju sa regularnim vremenskim intervalom. Ova pojava je logi
č
na s
obzirom da vokalni trakt koji proizvodi glas u ljudskom grlu generiše vibracije koje se periodi
č
no
ponavljaju. Do sli
č
nih zaklju
č
aka možemo do
ć
i ukoliko posmatramo EKG (elektrokardiogram) rada
zdravog ljudskog srca.
Postoji mnogo zajedni
č
kih ta
č
aka izme
đ
u kontinualnih i diskretnih signala u vremenu, ali
zato postoje i mnoge,
č
esto suštinske razlike me
đ
u njima. Zbog toga
ć
emo uvek jasno nazna
č
iti o
kakvom signalu govorimo, i pre nego što bilo koji matemati
č
ki alat za analizu signala primenimo,
moramo biti sigurni da je to i opravdano.
Osim podele na kontinualne i signale diskretne u vremenu, postoji podela na
deterministi
č
ke
i
stohasti
č
ke
ili slu
č
ajne signale. Pod determinisit
č
kim signalima podrazumevamo one signale
č
ija
se vrednost sa nepogrešivom ta
č
noš
ć
u može predvideti i u dalekoj budu
ć
nosti. Jedan jednostavan
primer deterministi
č
kih signala jesu signali koji se analiti
č
ki (drugim re
č
ima pomo
ć
u nekog
matemati
č
kog izraza) definišu. Ako pogledamo signal
( )
t
x
definisanog pomo
ć
u slede
ć
e jednakosti
( )
( )
t
e
t
x
t
4
sin
02
.
0
−
=
(1.1)
tada je mogu
ć
e sra
č
unati vrednost ovog signala u bilo kom vremenskom trenutku u budu
ć
nosti. Sa
druge strane, ako pogledamo signal koji je snimljen kao izlazni napon sa mikrofona u potpunoj
tišini, vide
ć
e se da postoji signal male snage, koji o
č
igledno nije posledica nekog zvuka, ve
ć
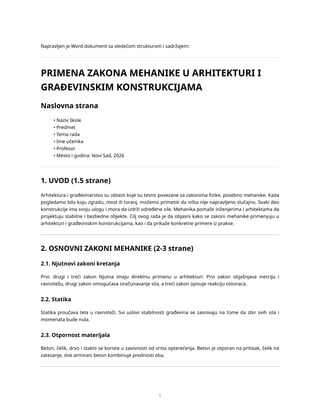
procesa koji postoje svuda oko nas a mi ih ne možemo kontrolisati. Naime termi
č
ko kretanje
molekula u svakoj materiji, kretanje molekula vazduha koje je zavisno od temperature, kretanje
elektrona u svakoj provodnoj sredini su primeri takvih pojava, koji se,
č
esto zbog njihove direktne
veze sa temperaturom, nazivaju termi
č
kim šumovima. Primer takvog termi
č
kog šuma (napon na
izlazu iz mikrofona u potpunoj tišini) je prikazan na slici 1.6. Iako se na njemu prime
ć
uju osobine
periodi
č
nosti, to nije regularna osobina koja se može predvideti. Vrednost ovog signala u
budu
ć
nosti se ne može prognozirati ve
ć
se samo može sa nekom verovatno
ć
om izra
č
unati interval
u kome se taj signal može realizovati.
Slika 1.6: Primer termi
č
kog šuma
Sa druge strane, u kontekstu ovog kursa, pod sistemom
ć
emo podrazumevati ure
đ
aj, proces
ili algoritam koji za neki ulazni signal
( )
t
x
, na svom izlazu generiše izlazni signal
, kako je to
prikazano na slici 1.7.
( )
t
y
Sistem
( )
t
x
( )
t
y
Sistem
( )
t
x
1
( )
t
y
1
( )
t
x
m
#
#
( )
t
y
r
Slika 1.7: Predstava sistema sa jednim ili više ulaza i izlaza
Za sada podrazumevajmo da nezavisna promenljiva
t
može biti i kontinualna i diskretna. Mogu
ć
e je
da sistem ima i više ulaza i više izlaza, kao što je to prikazano na slici 6. Uobi
č
ajeno je da elektri
č
ni
kontinualni sistemi (
č
iji su ulazni i izlazni signali kontinualne funkcije vremena) u sebi sadrže
integratore, diferencijatore, množa
č
e, RLC kola, dok diskretni sistemi (koji operišu sa signalima
diskretnim u vremenu) imaju kola za kašnjenje, akumulatore umesto integratora, elemente za
ra
č
unanje kona
č
nih razlika umesto diferencijatora i tako dalje.
Po svojoj nameni sistemi mogu biti grubo podeljeni u nekoliko grupa.
Analizatori
su sistemi
koji izdvajaju željenu informaciju iz signala i prikazuju je korisniku.
Sintetizatori
,
sa druge strane,
generišu željeni izlazni signal na svom izlazu.
Transdjuseri
ili pretvara
č
i pretvaraju signal iz jedne
fizi
č
ke forme u drugu (kao što su na primer mikrofoni kaji pritisak na membranu mikrofona
pretvaraju u naponski signal, ili termo-elementi koji temperaturu pretvaraju u elektri
č
nu otpornost).
Komunikacioni kanali
kao što su koaksijalni kablovi, mikrotalasni vodovi, fiberopti
č
ki kablovi
nose signal sa jedne na drugu lokaciju.
Filteri
modifikuju signal na odgovaraju
ć
i na
č
in trude
ć
i se da
potisnu u
č
iank neželjenih smetnji i šumova.
Kompenzatori
su specijalni filtri koji imaju za zadatak
da izmene neželjene osobine nekih drugi sistema.
Posebnu klasu vrlo važnih sistema
č
ine sistemi sa povratnom spregom (u engleskoj
terminologiji se koristi re
č
feedback
za povratnu spregu) koji se može koristiti u bilo kom od
gorenavedenih tipova sistema. Struktura sistema sa povratnom spregom je prikazana na slici 1.8.

U nekim udžbenicima se ova funkcija naziva
Hevisajdovom funkcijom
i ozna
č
ava kao
( )
t
h
.
Primetimo da jedini
č
na odsko
č
na funkcija ima diskontinuitet za
0
=
t
i da definicijom (2)
( )
0
u
nije
ni definisano. Neki autori ovoj funkciji pridružuju u nuli vrednosti
ili
( )
0
0
=
u
( )
1
0
=
u
ili
, me
đ
utim primetimo da ni jedna od ovih definicija ne može promeniti diskontinuitet u toj
ta
č
ki, a sa druge strane sa aspekta gotovo svih analiza efekat je isti.
( )
5
.
0
0
=
u
Jedini
č
na odsko
č
na funkcija je vrlo korisna jer se pomo
ć
u nje može definisati
č
itav skup
drugih signala. Na primer, pravougaona
č
etvrtka
( )
t
p
prikazana na slici 2.2, se jednostavno može
predstaviti razlikom dve jedini
č
ne odsko
č
ne funkcije:
( ) ( ) (
)
0
,
>
−
−
=
T
T
t
u
t
u
t
p
(2.2)
Slika 2.2: CT pravougaona
č
etvrtka
Primetimo da smo u relaciji (2.2) uveli takozvanu zakašnjenu jedini
č
nu odsko
č
nu funkciju
(
)
T
t
u
−
koja ima vrednost 0 dok god je
, odnosno
0
<
−
T
t
T
t
<
, i koja ima vrednost 1 dok je
0
>
−
T
t
,
odnosno
.
T
t
>
Jedini
č
na impulsna funkija (Dirakov impuls)
Slede
ć
i važan elementarni signal jeste
jedini
č
ni impuls
,
č
esto nazivan
Dirakovim
impulsom
. Definiše se tako da zadovolji slede
ć
a tri uslova:
1.
( )
0
=
t
δ
za
0
≠
t
.
2.
( )
t
δ
nije definisana za
0
=
t
. (2.3)
3.
( )
⎩
⎨
⎧
<
<
=
∫
inace
t
t
je
ako
dt
t
t
t
,
0
0
,
1
2
1
2
1
δ
Na osnovu navedenih osobina možemo intuitivno osetiti da je jedini
č
ni impuls zapravo prvi izvod
jedini
č
ne odsko
č
ne funkcije. Me
đ
utim, s obzirom da jedini
č
na odsko
č
na funkcije nije
diferencijabilna za
, ovakav iskaz matemati
č
ki nije potpuno korektan. Ako bismo se ovim
problemom pozabavili na rigorozan matemati
č
ki korektan na
č
in, morali bi da se pomognemo
teorijom generalizovanih funkcija, što prevazilazi okvire ovog kursa. Zato
ć
emo se zadovoljiti
slede
ć
im argumentima, koji su sa stanovišta inženjerske prakse sasvim zadovoljavaju
ć
i. Naime,
posmatrajmo signal
0
=
t
( )
t
u
~ koji je prikazan na slici 2.3. Jasno je da ovaj signal jeste neka
aproksimacija jedini
č
ne odsko
č
ne funkcije i da u grani
č
nom slu
č
aju kada
ova dva signala
postaju identi
č
na. Definišimo sada signal
0
→
∆
( )
t
δ
~
koji
ć
e biti prvi izvod signala
( )
t
u
~ , odnosno
( )
( )
dt
t
u
d
t
~
~
=
δ
(2.4)
O
č
igledno je da sada signal
( )
t
δ
~
postaje aproksimacija Dirakovog jedini
č
nog impulsa i on je
prikazan slikom 2.4.
( )
t
u
~
0
∆
1
t
Slika 2.3: Aproksimacija jedini
č
ne odsko
č
ne funkcije
( )
t
δ
~
0
∆
∆
/
1
t
Slika 2.4: Aproksimacija jedini
č
ne impulsne funkcije (Dirakovog impulsa)
Primetimo da je površina ispod funkcije
( )
t
δ
~
uvek jednaka 1, nezavisno od veli
č
ine parametra
∆
i
da je vrednost signala jednaka nuli van intervala
∆
≤
≤
t
0
. Kako su zadovoljene relacije:
( ) ( )
t
u
t
u
=
→
∆
~
lim
0
(2.5)
( ) ( )
t
t
δ
δ
=
→
∆
~
lim
0
(2.6)
( )
( )
dt
t
u
d
t
~
~
=
δ
(2.7)
u tom smislu možemo pisati da je
( )
( )
dt
t
du
t
=
δ
(2.8)
Potpuno ekvivalentno relaciji (9) možemo pisati odgovaraju
ć
u integralnu relaciju
(2.9)
( )
( )
∫
∞
−
=
t
d
t
u
τ
τ
δ
Dalje, dogovorimo se da jedini
č
nu impulsnu funkciju (Dirakov impuls) grafi
č
ki predstavljamo na
na
č
in koji je prikazan slikom 2.5, pri
č
emu oznaka ''1'' na slici ne predstavlja vrednost signala u

Da bi interpretirali proizvod
definisan jedna
č
inom (2.10), ponovo se poslužimo
aproksimacijom Dirakovog impulsa
( )
t
y
( )
t
δ
~
i pomo
ć
u njega formirajmo aproksimaciju signala
( )
t
y
:
( ) ( ) (
)
0
~
~
t
t
t
x
t
y
−
=
δ
(2.11)
Ovi signali su prikazani na slici 2.8.
( )
t
x
(
)
0
~
t
t
−
δ
t
0
t
∆
+
0
t
0
( )
t
y
~
t
0
t
∆
+
0
t
0
( )
∆
0
t
x
Slika 2.8: Ilustracija aproksimacije proizvoda
( ) ( ) (
)
0
~
~
t
t
t
x
t
y
−
=
δ
Pretpostavimo da je funkcija
neprekidna na intervalu
( )
t
x
∆
+
≤
≤
0
0
t
t
t
i da je interval dovoljno
mali da možemo pretpostaviti da je signal
∆
( )
t
x
približno konstantan u tom intervalu, tako da
možemo pisati slede
ć
u aproksimaciju
( ) ( ) (
)
0
0
~
~
t
t
t
x
t
y
−
≈
δ
(2.12)
Ova je aproksimacija utoliko ta
č
nija ukoliko je
∆
manje, a kako u grani
č
nom slu
č
aju kada
0
→
∆
funkcija
(
0
)
~
t
t
−
δ
konvergira ka funkciji
(
)
0
t
t
−
δ
, kona
č
no možemo pisati:
( ) ( ) (
) ( ) (
)
0
0
0
t
t
t
x
t
t
t
x
t
y
−
=
−
=
δ
δ
(2.13)
To prakti
č
no zna
č
i da funkcija
nije ništa drugo nego Dirakov impuls
( )
t
y
(
0
t
t
−
)
δ
skaliran
vrednoš
ć
u signala
u trenutku
. Ovi signali su ilustrovani na slici 2.9.
( )
t
x
0
t
t
=
Jednostavna, ali vrlo korisna posledica ovog rezultata jeste slede
ć
a relacija:
(2.14)
( )
( ) (
)
( )
0
0
t
x
dt
t
t
t
x
dt
t
y
=
−
=
∫
∫
∞
∞
−
∞
∞
−
δ
koja kaže da se integracijom signala
po celom skupu nezavisne vremenske promenljive
t
može
dobiti vrednost signala
( )
t
y
( )
t
x
u trenutku
0
t
t
=
. Ova osobina se zove osobina pomeranja impulsne
funkcije (ili u engleskoj literaturi
shifting property of the unit impulse
).
( )
t
x
(
)
0
~
t
t
−
δ
t
0
t
0
( ) ( ) (
)
0
t
t
t
x
t
y
−
=
δ
t
0
t
0
( )
0
t
x
Slika 2.9: Ilustracija proizvoda signala
( ) ( ) (
)
0
t
t
t
x
t
y
−
=
δ
Eksponencijalni signali
Slede
ć
a klasa vrlo važnih kontinualnih signala jeste klasa kompleksnih eksponencijalnih
signala:
( )
t
Ae
t
x
λ
=
(2.15)
gde u opštem slu
č
aju parametri
A
i
λ
mogu biti kompleksni brojevi. Ukoliko su ovi parametri
realni brojevi, onda se signal
naziva realnom eksponencijalnom funkcijom ili signalom.
Ukoliko je realni parametar
( )
t
x
λ
pozitivan (slika 2.10) tada se za signal
kaže da je
eksponencijalno rastu
ć
i. Eksponencijalno rastu
ć
a funkcija se koristi vrlo
č
esto da opiše neke
prirodne pojave koje su po svojoj prirodi nestabilne. Sa druge strane, ako je realan parametar
( )
t
x
λ
negativan, tada govorimo o eksponencijalno opadaju
ć
em signalu. Ovakva vrsta signala opisuje
mnoge stabilne pojave u prirodi, kao što je na primer odziv RC ili RL kola, emisija nuklearnih
č
estica iz radioaktivnog materijala i tako dalje. U grani
č
nom slu
č
aju kada je parametar
λ
jednak
nuli, signal
postaje konstantan.
( )
t
x

( )
t
A
0
cos
ω
A
0
T
( )
(
)
2
/
cos
sin
0
0
π
ω
ω
−
=
t
A
t
A
A
0
T
(
) (
)
2
/
0
;
cos
0
π
φ
φ
ω
<
<
+
t
A
A
0
Slika 2.11: Realne sinusoide za razli
č
ite vrednosti faze
φ
Dakle, realna sinusoida se može napisati kao realni deo kompleksne sinusoide
( )
(
)
{
}
φ
ω
+
=
t
j
Ae
t
x
0
Re
(2.24)
ili ekvivalentno
( )
(
)
(
)
(
)
φ
ω
φ
ω
+
−
+
+
=
t
j
t
j
e
e
A
t
x
0
0
2
(2.25)
Parametar
0
ω
se naziva kružnom u
č
estanoš
ć
u (ili kružnom frekvencijom) i jedinica u kojoj se
izražava je radijan u sekundi
, a parametar
[
s
rad
/
]
φ
fazom signala (ili ponekad po
č
etnom fazom) i
izražava se u radijanima
[ ]
rad
. Vrlo
č
esto se kružna u
č
estanost
0
ω
predstavlja u formi
0
0
2
f
π
ω
=
gde je
frekvencija ili u
č
estanost i ona se izražava u hercima
0
f
[ ]
Hz
. Njihova veza se periodom
sinusoidalnog signala je:
0
0
1
2
f
T
=
=
ω
π
(2.26)
Primetimo da u imeniocima izraza (27) stoje apsolutne vrednosti, jer u generalnom slu
č
aju kružna
u
č
estonost i frekvencija mogu biti i negativne, dok je po definiciji perioda
T
pozitivan realni broj.
U generalnom slu
č
aju i parametar
A
i
λ
mogu biti kompleksni brojevi. Ako ih napišemo u
formi:
φ
j
e
A
A
=
(2.27)
i
0
ω
λ
j
r
+
=
(2.28)
kompleksni sinusni signal postaje
(
)
(
)
(
)
(
)
[
]
φ
ω
φ
ω
φ
ω
ω
φ
λ
+
+
+
=
=
=
+
+
t
j
t
e
A
e
e
A
e
e
A
Ae
rt
t
j
rt
t
j
r
j
t
0
0
sin
cos
0
0
(2.29)
U pore
đ
enju sa izrazom (2.17), izraz (2.29) uvodi takozvani prigušuju
ć
i faktor (u engleskom jeziku
je to
damping factor
)
koji eksponencijalno raste ako je
ili eksponencijalno opada ako je
. Signal koji sadrži realni deo signala definisanog preko relacije (2.29) glasi
rt
e
0
>
r
0
<
r
{ }
(
)
φ
ω
λ
+
=
t
e
A
Ae
rt
t
0
cos
Re
(2.30)
a njegov oblik je prikazan na slici 2.12 za slu
č
aj pozitivnog i negativnog
r
. Na ovoj slici su
isprekidanim linijama prikazane takozvane
anvelope
signala
rt
e
A
±
. Signal koji ima negativno
r
se
u literaturi ozna
č
ava kao prigušena sinusoida i
č
esto se pojavljuje analizama mehani
č
kih i
elektri
č
nih sistema.

Pitanje 3: Modifikacija nezavisne vremenske promenljive
t
u kontinualnim
signalima
Pomeranje signala u vremenu
Mnoge jednostavne ali važne operacija nad signalima se mogu predstaviti jednostavnom
modifikacijom vremenske promenljive
t
u analiti
č
kim izrazima za signale. Ve
ć
smo videli da signal
(
0
)
x t t
−
nije ništa drugo nego pomeranje signala
( )
x t
za vremenski interval . Ukoliko je
to je zapravo kašnjenje signala (pomeranje u desno), ukoliko je
0
t
0
0
t
>
0
0
t
<
to je takozvano prednja
č
enje
signala (pomeranje u levo). Na slici 3.1. ilustrovano je prednja
č
enje i kašnjenje signala.
(
)
0
x t t
+
(
)
0
x t t
−
( )
x t
0
t
0
t
−
t
Slika 3.1: Ilustracija vremenskog pomeranja signala
Inverzija vremena
Posmatrajmo
modifikovani
signal
( )
( )
y t
x t
=
−
(3.1)
Poslednja relacija govori da je, na primer,
( )
( )
1
1
y
x
=
−
,
( )
( )
y
x
π
π
=
−
, i tako dalje za sve
vrednosti nezavisne promenljive
t
. Primer ovakvih signala je prikazan na slici 2.2. Efekat inverzije
vremena je najuo
č
ljiviji ukoliko se video traka premotava unazad.
( )
x t
( )
( )
y t
x t
=
−
t
Slika 3.2: Ilustracija signala sa inverzijom vremena
Skaliranje vremena
Dalje, posmatrajmo modifikaciju signala na slede
ć
i na
č
in:
( )
( )
2
y t
x t
=
(3.2)
Tada je
( )
( ) ( )
(
1
2 , 1/ 2
y
x
y
x
=
)
1
=
i tako dalje, što zna
č
i da je u signalu
vreme
kompresovano i da je signal
y
zapravo dva puta ubrzani signal
x
(u engleskoj literaturi se za ovakve
sisteme kaže
compressed-time signals
). Primer ovih signala je prikazan na slici 3.3.
( )
y t
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
x(t)
t
y(t)=x(2t)
t
Slika 3.3: Ilustracija skaliranja (kompresije) vremena
Ukoliko definišemo novi signal
na slede
ć
i na
č
in:
( )
z t
( )
( )
/ 2
z t
x t
=
(3.3)
Sada
ć
e vrednost signala
biti jednaka
( )
1
z
( )
0.5
x
,
( )
2
z
biti jednaka
( )
1
x
i tako dalje. Drugim
re
č
ima, posmatrani signal
z
biti 'razvu
č
ena' ili usporena verzija signala
x
. U engleskoj literaturi se za
ovakve signale koristi termin
stretched-time signals.
Primer ovakvih signala dat je na slici 3.4.
x(t)
t

( )
( )
/ 2
z t
x t
=
t
2
−
1
−
0
1
2
3
4
1
Slika 3.6: Signal
( )
( )
/ 2
z t
x t
=
Sada formirajmo novi, pomo
ć
ni signal
( ) ( )
(
)
/ 2
q t
z
t
x t
=
− =
−
koji
ć
e uklju
č
iti inverziju vremena.
On se jednostavno dobija od signala
tako što se izvrši prosta refleksija u odnosu na oordinatu
(zbog toga se ponekada ova modifikacija inverzija vremena naziva refleksijom). Ovaj signal je
prikazan na silici 3.7. Opet nam je kontrolna ta
č
ka
( )
z t
( )
( )
0
0
q
x
1
=
=
.
( )
(
)
/ 2
q t
x t
=
−
t
2
−
1
−
0
1
2
3
4
1
3
−
4
−
Slika 3.7: Pomo
ć
ni signal
( )
(
)
/ 2
q t
x t
=
−
Kona
č
no, treba izvršiti skaliranje u vremenu da bi dobili željeni signal
. Ova
poslednja transformacija se dobija jednostavnim pomeranjem poslednjeg signala
, ali da bismo
dobili ta
č
nu informaciju o tome za koliko treba izvršiti pomeranje i u kome pravcu, napišimo signal
na slede
ć
i na
č
in:
( )
(
)
1
/ 2
y t
x
t
=
−
( )
q t
( )
y t
( )
(
)
(
)
(
)
(
)
1
/ 2
2 / 2
2
y t
x
t
x
t
q t
=
−
=
− −
=
−
. Dakle, kona
č
ni signal
( )
y t
se
dobija iz signala
tako što se on pomera u desno (dakle signal
y
kasni u odnosu na signal
q
) za
2 jedinice vremena. Signal
je prikazan na slici 3.8.
( )
q t
( )
y t
( )
(
)
1
/ 2
y t
x
t
=
−
t
2
−
1
−
0
1
2
3
1
3
−
4
−
4
Slika 3.8: Kona
č
ni oblik signala
( )
(
)
1
/ 2
y t
x
t
=
−
I naravno, ponovo možemo proveriti korektnost dobijenog signal vezuju
ć
i se za neke konkretne
vrednosti vremenskih trenutaka:
( )
(
)
0
1 0 / 2
1
y
x
=
−
=
,
( )
(
)
1
1 1/ 2
1
y
x
=
−
=
i t.d.
Primer 3.2:
Zanimljivo je pogledati Dirakov signal u kome je nezavisna vremenska promenljiva
skalirana koeficijentom
1/ . Dakle posmatrajmo signal
a
( )
/
t a
δ
. Ako se setimo uslova koje treba
da zadovolji Dirakov signal
( )
t
δ
vide
ć
emo da ih i signal
( )
/
t a
δ
zadovoljava. Naime:
1.
Signal
( )
/
t a
δ
=
0
)
za svako
,
0
t
≠
2.
Vrednost
nije definisano za
(
/
t a
δ
0
t
=
.
3.
Kona
č
no,
ako je
( )
( )
2
2
1
1
/
/
/
t
t a
t
t a
t a dt a
d
a
δ
δ τ
=
=
∫
∫
τ
1
2
0
t
t
< <
Dakle, signal
pod pretpostavkom da je parametar
a
pozitivan.
( )
(
/
t a
a t
δ
=
)
δ
Simetri
č
nost signala
Neke važne definicije i osobine signala poti
č
u iz osobina simetri
č
nosti. Iz matematike je
poznato da neki signali imaju osobine parnosti ili neparnosti. Za signal koji zadovoljava slede
ć
u
jednakost
( )
( )
x t
x t
=
−
(3.4)
kažemo da je paran. Sa druge strane, za signal sa slede
ć
im svojstvom
( )
( )
x t
x t
= − −
(3.5)
kažemo da je neparan. Tipi
č
ni parni signali su x
( )
( )
0
cos
x t
t
ω
=
ili
( )
t
x t
e
−
=
, dok su predstavnici
neparnih signala ili funkcija
( )
( )
0
sin
x t
t
ω
=
ili
( )
( )
0.5
x t
u t
=
−
. Važnost parnih i neparnih signala
poti
č
e uglavnom iz
č
injenice da se realni signal (signal koji za svaki trenutak nezavisne vremenske
promenljive uzima vrednost iz skupa realnih brojeva) može napisati kao zbir njegovog parnog i
neparnog dela. Parni deo signala se definiše na slede
ć
i na
č
in:
( )
{ }
( ) ( )
1
2
Ev x t
x t
x t
=
+ −
⎡
⎤
⎣
⎦
(3.6)
dok se neparni deo signala sra
č
unava kao:
( )
{ }
( ) ( )
1
2
Od x t
x t
x t
=
− −
⎡
⎤
⎣
⎦
(3.7)
Oznake
Ev
i
Od
poti
č
u od engleskih re
č
i
even
i
odd
, što zna
č
i paran, odnosno neparan. Lako se na
osnovu relacija (3.6) i (3.7) proverava, da se signal
( )
x t
zaista može sra
č
unati kao zbir njegovog
parnog i neparnog dela:
( )
( )
{ }
( )
{ }
x t
Ev x t
Od x t
=
+
(3.8)
Primer 3.3:
Sra
č
unajmo parni i neparni deo pravougaone
č
etvrtke
( )
( ) (
p t
u t
u t T
=
−
−
)
. Po
definiciji parnog i neparnog dela signala, možemo pisati:
( )
{
}
( )
( )
( ) (
) ( ) (
)
1
1
2
2
Ev p t
p t
p t
u t
u t T
u t
u t T
=
+
−
=
−
−
+ − − − −
⎡
⎤
⎡
⎣
⎦
⎣
⎤⎦
(3.9)

(4.3)
( )
(
) ( )
( ) (
)
( ) ( )
*
y t
x t
h
d
h
x t
d
h t
x t
λ
λ λ
λ
λ λ
−∞
∞
∞
−∞
= −
−
=
−
=
∫
∫
što je dokaz da je konvolucija komutativna operacija nad signalima, odnosno
( ) ( )
( ) ( )
*
*
x t
h t
h t
x t
=
(4.4)
Lako se dokazuje da je ova operacija ima i osobinu asocijativnosti:
( ) ( )
(
)
( )
( ) (
)
( )
( ) (
)
(
)
( )
(
) (
)
( )
( ) (
)
( ) (
) (
)
( )
( ) ( )
(
)
*
*
*
*
*
*
x t
h t
g t
x
h t
d
g t
x
h
d
g t
d
x
h
g t
d
d
x
h
g t
d
d
x
h t
g t
d
x t
h t
g t
τ
τ τ
τ
λ τ τ
λ λ
τ
λ τ
λ λ τ
τ
µ
τ µ µ τ
τ
τ
τ
τ
∞
∞
∞
−∞
−∞
−∞
∞
∞
−∞
−∞
∞
∞
−∞
−∞
∞
−∞
⎡
⎤
⎡
⎤
=
−
=
−
−
⎢
⎥
⎢
⎥
⎣
⎦
⎣
⎦
⎡
⎤
=
−
−
=
⎢
⎥
⎣
⎦
⎡
⎤
=
− −
⎢
⎥
⎣
⎦
=
−
−
=
⎡
⎤
⎣
⎦
∫
∫ ∫
∫
∫
∫
∫
∫
(4.5)
Tako
đ
e, lako se dokazuje da je operacija konvolucija distributivna sa operacijom sabiranja signala:
( )
( )
( )
( ) ( ) ( )
( )
1
2
1
2
*
*
*
x t
h t
h t
x t
h t
x t
h t
+
=
+
⎡
⎤
⎣
⎦
(4.6)
Na osnovu relacije (4.2) se može zaklju
č
iti, da ako želimo da sra
č
unamo konvoluciju signala
( )
x t
i
, naš algoritam treba da se sastoji u slede
ć
a
č
etiri koraka:
( )
h t
1.
korak:
Signal
( )
h
τ
se prvo invertuje i pomeri u vremenu kako bi se dobila forma
(
)
h t
τ
−
,
što postaje funkcija od
τ
gde je
t
parametar.
2.
korak:
Signali
( )
x
τ
i
(
h t
)
τ
−
se izmnože za sva mogu
ć
e vrednosti varijable
τ
a za neko
fiksno
t
.
3.
korak:
Proizvod
( ) (
)
x
h t
τ
τ
−
se integrali po celom skupu vrednosti
τ
i tako se dobija
vrednost
za neko fiksno
t
.
( )
y t
4.
korak:
Ponove se koraci 1,2 i 3 za razli
č
ite vrednosti parametra
t
iz skupa
kako bi
se dobila kompletna funkcija
.
(
,
−∞ ∞
)
( )
y t
Dakle, teorijski gledano beskona
č
no mnogo neodre
đ
enih integrala treba odrediti u cilju jedne jedine
konvolucije
. Me
đ
utim, na sre
ć
u, u naj
č
eš
ć
em broju slu
č
ajeva, ovaj se problem uglavnom
svodi na sra
č
unavanje par odre
đ
enih integrala.
( )
y t
Primer 4.1:
Sra
č
unajmo konvoluciju dve jedini
č
ne odsko
č
ne funkcije
( )
( ) ( )
*
y t
u t
u t
=
(4.7)
Po definiciji možemo pisati:
( )
( ) (
)
y t
u
u t
d
τ
τ τ
∞
−∞
=
−
∫
(4.8)
Znaju
ć
i da je
za
( )
0
u
τ
=
0
τ
<
, poslednji izraz postaje
( )
( ) (
)
0
y t
u
u t
d
τ
τ τ
∞
=
−
∫
(4.9)
Dalje, uzimaju
ć
i u obzir da je
za
( )
1
u
τ
=
0
τ
>
, integral se dalje pojednostavljuje
( )
(
)
0
y t
u t
d
τ τ
∞
=
−
∫
(4.10)
Ukoliko izvršimo smenu promenljivih
t
τ λ
− =
, izraz (4.10) postaje
( )
( )
t
y t
u
d
λ λ
−∞
=
∫
(4.11)
Kona
č
no, poslednji integral je jednostavno sra
č
unati ukoliko je poznata vrednost vremenske
promenljive
t
:
(4.12)
( )
( )
( )
( )
0
0
0
0
t
t
t
t
t
y t
u
d
d
t
y t
u
d
d
t
λ λ
λ
λ λ
λ
−∞
−∞
−∞
< ⇒
=
=
=
≥ ⇒
=
=
=
∫
∫
∫
∫
0
Oblik signala
je prikazan na slici 4.1.
( )
y t
( )
( ) ( )
*
y t
u t
u t
=
0
t
Slika 4.1: Oblik signala
( )
( ) ( )
*
y t
u t
u t
=
S obzirom na prirodu jedini
č
nog odsko
č
nog signala dobijeni rezulat možemo napisati u
pojednostavljenoj formi:
( )
( )
y t
tu t
=
(4.13)
Primer 4.2:
Jedna od važnih osobina konvolucije
( )
( ) ( )
*
y t
x t
h t
=
je ilustrovana u slede
ć
em
primeru. Ako signali
( )
x t
i
zadovoljavaju slede
ć
i uslov:
( )
h t
( )
( )
1
2
0
0
x t
za t
h t
za t t
t
=
<
=
<
(4.14)
kao što je to prikazano na slici 4.2., tada i njihova konvolucija
( )
y t
zadovoljava sli
č
an uslov.
( )
x t
t
1
t
0
( )
h t
t
2
t
0
Slika 4.2.
Ovo tvr
đ
enje nije teško dokazati. Ponovo možemo po
ć
i od definicionog izraza za konvoluciju:
( )
( ) (
)
y t
x
h t
d
τ
τ τ
∞
−∞
=
−
∫
(4.15)
S obzirom da je signal
( )
x
τ
jednak nuli za
1
t
τ
<
, integral (4.15) postaje

(4.22)
( )
(
) ( )
(
)
(
)
(
) ( )
(
)
(
)
[
)
1 4
2 3
1 4
2 3
1
3
min
,
1
3
2
max
,
2
4
1
3
min
,
1
3
2
4
max
,
4
0 ;
;
i
0 ;
0 ;
;
,
0 ;
t t t
t t t
t t t
t t t
t t
t
y t
x t
h
d
t t
t
t t
t
t t
t
t t
t
x t
h
d
t
t
t t
t
t t
λ
λ λ
λ
λ λ
−
−
−
−
− <
⎧
⎪⎪
=
−
− ≥
−
⎨
⎪
− ≥
⎪⎩
< +
⎧
⎪⎪
=
−
∈ +
+
⎨
⎪
≥
⎪⎩
∫
∫
4
<
Kona
č
no, oblik signala
y
je prikazan na slici 4.5.
( ) ( ) ( )
*
y t
x t
h t
=
t
1
3
t
t
+
0
2
4
t
t
+
Slika 4.5: Oblik konvolucije nad signalima
( )
x t
i
( )
h t
Dobijeni rezultati su vrlo važni jer se na osnovu njih može zaklju
č
iti da ako su signali
( )
x t
i
( )
h t
kauzalni (signal
( )
x t
je kauzalan ako za svako
0
t
<
,
( )
0
x t
=
), tada je i njihova konvolucija
tako
đ
e kauzalan signal. Ovo je osobina koja
ć
e nam u velikoj meri pomo
ć
i
prilikom odre
đ
ivanja odziva sistema na zadatu pobudu.
( )
( ) ( )
*
y t
x t
h t
=
Primer 4.4:
Sra
č
unajmo konvoluciju dva pravougaona signala
( )
x t
i
( )
h t
:
( )
(
) (
)
( )
(
) (
)
2
2 ;
2
1
x t
u t
u t
h t
u t
u t
=
+
−
−
=
− −
−
4
⎡
⎤
⎣
⎦
Ovi signali su prikazani na slici 4.6.
( )
x t
0
1
( )
h t
2
4
2
−
t
Slika 4.6: Primer pravougaonih signala
Primenom definicionog izraza (4.3) možemo pisati:
( )
( ) (
)
(
)
2
2
y t
x t h t
d
h t
d
τ τ
τ
∞
−∞
−
=
−
=
−
∫
∫
τ
Usvjaju
ć
i smenu pomenljivih
t
τ λ
− =
dobija se integral:
( )
( )
2
2
t
t
y t
h
d
λ λ
+
−
= ∫
Poslednji izraz nam govori da pravougaoni signal
( )
(
) (
)
2
1
4
h
u
u
λ
λ
λ
=
− −
−
⎡
⎤
⎣
⎦
treba integraliti u
intervalu od
t
-2 do
t
+2. Uzimaju
ć
i u obzir oblik signala
( )
h
λ
jasno je da, zavisno od vrednosti
nezavisne promenljive
t
, ovaj integral može uzeti razli
č
ite vrednosti:
( )
( )
(
)
( )
( )
(
)
( )
2
1
4
1
4
2
2 1
0
2 [1, 4)
2
2
1
2 [4,5)
2
6
2 [1, 4)
2
2 6
2 4
0
t
t
t
y t
t
y t
d
t
y t
d
t
y t
d
t
y t
λ
λ
λ
+
−
+ < ⇒
=
+ ∈
⇒
=
=
+
∫
+ ∈
⇒
=
=
∫
− ∈
⇒
=
=
−
∫
− ≥ ⇒
=
t
t
)
ili
( )
(
)
(
)
0 ;
1
2
1 ;
[ 1, 2
6;
[2,3)
2 6
;
[3,6)
0 ;
6
t
t
t
y t
t
t
t
t
< −
⎧
⎪
+
∈ −
⎪⎪
=
∈
⎨
⎪
−
∈
⎪
⎪
≥
⎩
Ovaj signal je prikazan na slici 4.7, sa koje se jasno vidi da je usled ograni
č
enosti signala
x
na
intervalu
[
]
2, 2
−
i signala
h
na intervalu
[ ]
1, 4
, proisti
č
e ograni
č
enost signala
y
na intervalu
[
]
1, 6
−
.
( )
y t
0
6
1
−
t
3
6
Slika 4.7: Konvolucija signala
Primetimo da se ovaj zadatak mogao lakše rešiti koriš
ć
enjem rezultata dobijenim iz primera 4.1:
( ) ( )
( )
*
u t
u t
tu t
=
Naime, imaju
ć
i u vidu kako su definisani signali
( )
x t
i
( )
h t
, traženi konvolucioni signal
( )
y t
se
mogao napisati kao zbir
č
etiri konvoluciona signala:
( )
( ) ( )
(
) (
)
(
) (
)
(
)
(
) (
) (
) (
) (
) (
) (
) (
)
{
}
*
2
2 * 2
1
4
2
2 *
1
2 *
4
2 *
1
2 *
4
y t
x t
h t
u t
u t
u t
u t
u t
u t
u t
u t
u t
u t
u t
u t
⎡
⎤
=
=
+ −
−
− −
−
⎡
⎤
⎣
⎦ ⎣
⎦
=
+
− −
+
− −
−
− +
−
−
Sa druge strane, lako se pokazuje (
č
itaocima se prepušta dokaz) da ako je signal
konvolucija
signala
( )
y t
( )
x t
i
, tada je konvolucija pomerenih signala
( )
h t
(
)
1
x t t
−
i
(
)
2
h t t
−
signal
(
)
1
2
y t t
t
− −
.
Na osnovu toga, ako uvedemo oznaku
( )
( )
( ) ( )
*
r t
tu t
u t
u t
=
=
,
tada
ć
e traženi konvolucioni signal biti:
( )
(
) (
) (
) (
)
2
1
2
3
6
y t
r t
r t
r t
r t
=
+ −
− −
− +
−
⎡
⎤
⎣
⎦

Primetimo da je za razliku od kontinualnog jedini
č
nog odsko
č
nog signala, sada vrednost
[ ]
0
u
definisana i iznosi 1. Tako
đ
e, diskretna pravougaona
č
etvrtka (u engleskoj literaturi ozna
č
ena kao
rectangular pulse
) je vrlo
č
esto u upotrebi i definiše se kao:
(5.2)
[ ] [ ] [
]
0 ,
0
1 , 0
1
0 ,
n
p n
u n
u n N
n N
n N
<
⎧
⎪
=
−
−
=
≤ ≤ −
⎨
⎪
≥
⎩
i prikazana na slici 5.2.
[ ]
p n
0 1 2
1
−
n
N
1
Slika 5.2: Diskretna pravougaona
č
etvrtka
Primetimo tako
đ
e, da signal
[
]
u n N
−
ozna
č
ava signal
[ ]
u n
koji je zakašnjen (dakle pomeren u
desno na vremenskoj skali) za
N
, i koji je jednak nuli za
n N
<
i jednak jedinici za
.
n N
≥
Jedini
č
na impulsna funkcija
Diskretna
jedini
č
na impulsna funkcija (ponekad nazivana
jedini
č
nim odbirkom,
na
engleskom
unit-sample
) se ozna
č
ava kao
[ ]
n
δ
i definiše se na slede
ć
i na
č
in:
[ ]
0 ,
0
1 ,
0
n
n
n
δ
≠
⎧
= ⎨
=
⎩
(5.3)
i prikazana je na slici 5.3.
[ ]
n
δ
0 1 2
1
−
n
1
Slika 3.3: Diskretna jedini
č
na impulsna funkcija
I dalje postoji jednostavna veza izme
đ
u jedini
č
ne odsko
č
ne i impulsne funkcije. Jednostavno se
dokazuje da je jedini
č
na impulsna funkcija jednaka jednokora
č
noj kona
č
noj razlici dve odsko
č
ne
funkcije:
[ ] [ ] [
]
1
n
u n
u n
δ
=
−
−
(5.4)
dok se jedini
č
na odsko
č
na funkcija može napisati u obliku suma jedini
č
nih impulsnih signala:
(5.5)
[ ]
[ ]
n
m
u n
m
δ
=−∞
=
∑
O
č
igledno da prvom diferencijalu u kontinalnom vremenu odgovara kona
č
na razlika, dok integralu
odgovara postupak sumiranja u diskretnom domenu. Analogno relaciji (2.13) iz drugog pitanja koju
smo zvali osobina pomeranja impulsne funkcije, u diskretnom domenu vremena odgovara slede
ć
a
relacija
[ ] [
] [ ] [
]
0
0
0
x n
n n
x n
n n
δ
δ
−
=
−
(5.6)
koju je jednostavno dokazati.
Eksponencijalni signali
Diskretni eksponencijalni kompleksni signal se u opštem slu
č
aju definiše na slede
ć
i na
č
in:
[ ]
n
x n
Ca
=
(5.7)
gde su u opštem slu
č
aju konstante
C
i
a
kompleksni brojevi. Kao i u slu
č
aju kontinualnih signala,
postoji nekoliko zanimljivih slu
č
ajeva. Ukoliko su i
C
i
a
realni brojevi, dobija se takozvana realna
eksponencijalna funkcija (signal), ali se sada oblik ove funkcije zna
č
ajno menja zavisno od toga iz
koja od 4 intervala
, 1
0 ,
i
1
a
>
a
> >
0
1
a
> > −
1
a
− >
, parametar
a
uzima vrednost. Oblici ove 4
vrste eksponencijalnih signala su prikazani na slici 5.4.
"
"
(
)
1
a
>
n
n
(
)
0
1
a
< <
n
(
)
1
0
a
− < <
"
"
n
(
)
1
a
< −
Slika 5.4:
Č
etiri slu
č
aja diskretni realnih eksponencijalnih signala
Primetimo da za
1
a
>
ovi signali neograni
č
eno (kaže se eksponencijalno) rastu, dok za
1
a
<
signali opadaju. Primetimo još da za negativne vrednosti parametra
a
signali imaju osobinu
alternacije, odnosno naizmeni
č
no iz odbirka u odbirak menjaju znak.
Sinusoidalni signali
Kompleksna sinusoida se dobija iz eksponencijalnog signala ukoliko usvojimo da parametar
a
ima oblik:
0
j
a e
Ω
=
, gde je kružna u
č
estanost
0
Ω
realni broj koji se izražava u radijanima. Tada,
pod pretpostavkom da je i parametar
C
kompleksan
j
C
C e
φ
=
, kompleksna sinusoida postaje
[ ]
(
)
(
)
(
)
0
0
0
cos
sin
j
n
j
n
x n
Ce
C e
C
n
j C
n
φ
0
φ
φ
Ω +
Ω
=
=
=
Ω +
+
Ω +
(5.8)

diskretnog signala, što je u kontinualnom slu
č
aju nemogu
ć
e. Ako, na primer, posmatramo diskretnu
sinusoidu sa u
č
estanoš
ć
u
0
Ω
i drugu sinusoidu sa u
č
estanoš
ć
u
(
)
0
2
π
Ω +
, tada je:
(
)
0
0
2
2
j
n
0
j
n j
n
e
e
e
e
π
π
Ω +
Ω
=
=
j
n
Ω
)
(5.15)
jer je
za celobrojne vrednosti
n
. Drugim re
č
ima, ove dve diskretne sinusoide sa
u
č
estanostima
i
(
2
1
j
n
e
π
=
0
Ω
0
2
π
Ω +
, se ne mogu razlikovati. Isti zaklju
č
ak važi i za realne sinusoide,
naravno pod uslovom da je razlika njihovih u
č
estanosti jednaka celom multiplu od 2
π
. Kao
posledica ove
č
injenice, kada god definišemo diskretnu sinusoidu potrebno je za u
č
estanosti
posmatrati samo interval dužine 2
π
, na primer
0
0
2
π
≤ Ω <
ili
0
π
π
− < Ω ≤
. Ova
ć
e
č
injenica biti
vrlo važna kada se kasnije budemo bavili diskretnom Furijeovom transformacijom.
U opštem slu
č
aju kada su i parametar
C
i
a
kompleksni brojevi
j
C
C e
φ
=
,
0
,
j
a
e
ρ
ρ
Ω
0
=
>
(5.16)
diskretni signal dobija formu:
[ ]
(
)
(
)
(
0
0
0
cos
sin
j
n
n
n
n
x n
Ca
C
e
C
n
j
n
φ
ρ
)
ρ
φ
φ
Ω +
=
=
=
Ω +
+
Ω +
⎡
⎤
⎣
⎦
(5.17)
Ponovo, po analogiji sa kontinualnim signalima, dobijamo modulisane sinusoide sa anvelopom
n
ρ
,
koja može biti prigušena ili opadaju
ć
a ako je
1
ρ
<
ili rastu
ć
a ako je
1
ρ
>
.
Realni deo ovog signala je:
{ }
(
)
0
Re
cos
n
n
Ca
C
n
ρ
φ
=
Ω +
(5.18)
i dva razli
č
ita slu
č
aja ovog signala su prikazana na slici 5.6.
n
(
)
1
ρ
>
(
)
1
ρ
<
n
Slika 5.6: Eksponencijalno rastu
ć
a i opadaju
ć
a diskretna sinusoida
Pitanje 6: Modifikacije nezavisne promenljive
n
u diskretnim signalima
Kao i u slu
č
aju kontinualnih vremenskih signala, mnoge zna
č
ajne operacije nad signalima se
mogu dobiti jednostavnom modifikacijom nezavisne vremenske promenljive
n
. Ponovo,
elementarne transformacije u slu
č
aju diskretnih signala su pomeranje u vremenu,
[
]
0
x n n
−
,
inverzija vremena
[ ]
x n
−
i skaliranje u vremenu
[ ]
x an
, koje se naj
č
eš
ć
e kombinuju.
Inverzija vremena
Ako definišemo diskretni signal
[ ]
y n
na osnovu signala
[ ]
x n
na slede
ć
i na
č
in:
[ ] [ ]
y n
x n
= −
(6.1)
jasno je da tada odbirci jednog i drugog signala zadovoljavaju relacije
[ ] [ ] [ ] [ ] [ ] [ ]
0
0 ;
1
1 ; 2
x
y
x
y
x
y
=
=
−
=
2
−
i tako dalje. Drugim re
č
ima, ponovo se signali
x
i
y
odnose
kao likovi u ogledalu, u odnosu na oordinatu. Primer takvih signala dat je na slici 6.1.
n
[ ]
x n
0
[ ] [ ]
y n
x n
= −
0
n
Slika 6.1: Ilustracija inverzije vremena
Skaliranje vremena
Po analogiji sa kontinualnim signalima, diskretni signal definisan slede
ć
om relacijom:
[ ] [ ]
2
y n
x n
=
(6.2)
je ubrazan u odnosu na signal
[ ]
x n
dva puta, ali postoji zna
č
ajna razlika. Primetimo da je
[ ] [ ] [ ] [ ] [ ] [ ]
0
0 ,
1
2 ,
2
y
x
y
x
y
x
=
=
=
4
i tako dalje. Drugim re
č
ima, u signalu
se ne pojavljuju
neparni odbirci signala
x,
[ ]
y n
[ ] [ ] [ ]
1 , 3 , 5
x
x
x
... Ovakva pojava se naziva
decimacijom signala x.
Naravno, ukoliko želimo da zadržimo samo neparne odbirke signala
x
, definisa
ć
emo signal
w
na
slede
ć
i na
č
in:
[ ] [
]
2
1
w n
x n
=
+
(6.3)
i tada
ć
e biti
[ ] [ ] [ ] [ ] [ ] [ ]
0
1 ,
1
3 ,
2
w
x
w
x
w
x
=
=
=
5
...
Usporavanje signala (skaliranje vremena koeficijentom koji je manji od 1) unosi još više
razli
č
itosti u odnosu na kontinualne signale. Pretpostavimo da je signal
z
definisan kao:
[ ] [
]
/ 2
z n
x n
=
(6.4)

n
[ ]
x n
0
3
3
−
4
3
2
1
n
[ ] [ ]
2
v n
x n
=
0
4
2
1
1
−
n
[ ] [ ]
w n
v n
= −
0
4
2
1
1
−
n
[ ]
[
]
1
y n
w n
=
−
0
4
2
1
1
−
Slika 6.3: Ilustracija kombinovanih modifikacija nezavisne vremenske promenljive
U cilju provere dobijenog rezultata, možemo se vezati za
0
2
n
= −
. Kako je
[ ]
0
2
x n
=
, potrebno je
da
[ ] [ ] [ ]
0
1
2
v
x
x
− = − =
n
bude tako
đ
e 2. Sa grafika se vidi da je taj uslov ispunjen. Dalje mora biti
[ ] [ ] [ ]
1
1
2
w
v
x
= − = − =
2
što je tako
đ
e ispunjeno. I kona
č
no, kako je
[ ] [
] [ ]
2
2 2* 2
2
y
x
x
2
=
−
= − =
zaklju
č
ujemo da su grafici prikazani na slici 6.3 ispravni.
Primer 6.2:
Na osnovu signala iz prethodnog primera formirati signal
[ ] [
]
3 2
z n
x
n
=
−
.
Ovaj se primer razlikuje od prethodnog po tome što signal
[ ]
z n
koristi samo neparne odbirke
signala
x
, dok je signal
y
iz prethodnog zadatka koristio samo parne odbirke. I ukoliko bi neko
poželeo da za rešavanje ovog zadatka iskoristi signal
[ ]
2
w
n
−
iz prethodnog primera, naišao bi na
problem pomeranja signala za 3/2 odbiraka što je nemogu
ć
e ( jer je
[ ] [
]
(
)
[
]
3 2
2
3/ 2
1.5
z n
x
n
x
n
w n
=
−
=
−
−
=
−
⎡
⎤
⎣
⎦
). Zbog toga u cilju rešavanja ovog primera treba
krenuti od pomo
ć
nog signala
[ ] [
]
2
1
q n
x n
=
+
koji izdvaja samo neparne odbirke signala
x
. Zatim,
inverzijom vremena na osnovu signala
q
treba formirati signal
[ ] [ ] [
]
2
1
r n
q n
x
n
= − = − +
, i
kona
č
no pomeranjem signala
r
za jedan odbirak u desno dolazimo do željenog signala
[ ] [
] [
] [
]
3 2
2(
1) 1
1
z n
x
n
x
n
r n
=
−
= −
− + =
−
. Ovi su signali prikazani na slici 6.4.
n
[ ]
x n
0
3
3
−
4
3
2
1
n
[ ] [
]
2
1
q n
x n
=
+
0 1
2
−
4
3
1
4
n
[ ] [ ]
r n
q n
=
−
0
1
−
2
4
3
1
4
n
[ ] [
]
1
z n
r n
=
−
0
3
4
3
1
4
Slika 6.4: Ilustracija kombinacija modifikacije nezavisne vremenske promenljive
Ponovo se jednostavno može proveriti ispravnost dobijenih grafika uo
č
avanjem nekom specifi
č
nog
vremenskog trenutka. Recimo za
znamo da je
0
3
n
= −
[ ]
0
1
x n
=
. Tada mora biti
[ ]
2
1
q
− =
i
[ ]
2
1
r
=
i
[ ]
3
1
z
=
, što se proverom na graficima potvr
đ
uje.
Osobine simetrije
Po analogiji sa kontinualnim vremenskim signalima, i za diskretne vremenske signale je
mogu
ć
e uvesti osobine parnosti i neparnosti. Za diskretni signal
[ ]
x n
kažemo da je paran ako
zadovoljava relaciju:
[ ] [ ]
x n
x n
= −
(6.6)
dok se za signal koji zadovoljava relaciju
[ ]
[ ]
x n
x n
= − −
(6.7)
kaže da je neparan. Važno je to da se svaki realni diskretni signal može napisati kao zbir svog
parnog i neparnog dela, gde se parni i neparni deo signala definišu shodno slede
ć
im relacijama:
[ ]
{ }
[ ] [ ]
(
1
2
)
Ev x n
x n
x n
=
+ −
(6.8)
[ ]
{ }
[ ] [ ]
(
1
2
Od x n
x n
x n
)
=
− −
(6.9)
gde je sa
{}
Ev
⋅
ozna
č
en parni a sa
{}
Od
⋅
neparni deo signala.
Primer 6.3:
Sra
č
unajmo parni i neparni deo jedini
č
ne diskretne odsko
č
ne funkcije.
Na osnovu relacija (6.8) i (6.9) možemo pisati:
[ ]
{ }
[ ] [ ]
[ ]
{ }
[ ] [ ]
1
2
1
2
Ev u n
u n
u n
Od u n
u n
u n
⎡
⎤
=
+ −
⎣
⎦
⎡
⎤
=
−
⎣
⎦
(6.10)

Pitanje 7: Konvolucija diskretnih signala u vremenu
Konvolucija je fundamentalna operacija koja se može vršiti nad diskretnim signalima, isto
kao i nad kontinualnim. Konvolucija dva diskretna signala
[ ]
x n
i
[ ]
h n
kao rezultat daje signal
[ ]
y n
, u oznaci
[ ] [ ] [ ]
*
y n
x n h n
=
(7.1)
pri
č
emu je
[ ]
[ ] [
]
k
y n
x k h n k
∞
=−∞
=
−
∑
(7.2)
Jednostavnom smenom promenljivih
m n k
= −
, može se pisati
(7.3)
[ ]
[ ] [
] [ ] [ ]
*
m
y n
h m x n m
h n x n
∞
=−∞
=
−
=
∑
što zna
č
i da je konvolucija nad diskretnim signalima komutativna operacija:
[ ] [ ] [ ] [ ]
*
*
x n h n
h n x n
=
(7.4)
Potpuno analogno sa konvolucijom nad kontinualnim signalima, lako se dokazuje da je konvolucija
i asocijativna operacija kao i da važi osobina distributivnosti konvolucije u odnosu na sabiranje:
[ ] [ ]
(
)
[ ] [ ] [ ] [ ]
(
)
*
*
*
*
x n h n
g n
x n
h n g n
=
(7.5)
[ ]
[ ]
[ ]
(
)
[ ] [ ] [ ] [ ]
1
2
1
2
*
*
*
x n
h n
h n
x n h n
x n h n
+
=
+
(7.6)
Na osnovu relacije (7.2) zaklju
č
ujemo da prilikom sra
č
unavanja konvolucije diskretnih signala
treba realizovati
č
etiri osnovna koraka:
1.
korak:
Signal
treba invertovati u vremenu i izvršiti pomeranje kako bi se dobio signal
[ ]
h k
[
]
h n k
−
koji je funkcija parametra
k
gde
n
predstavlja konkretan parametar.
2.
korak:
Signali
[ ]
x k
i
[
]
h n k
−
se izmnože za sve vrednosti promenljive
k.
3.
korak:
Proizvod
[ ] [
]
x k h n k
−
se sumira za sve vrednosti promenljive
k
,
č
ime se dobija
vrednost konvolucije
[ ]
y n
za jedno konkretno
n.
4.
korak:
Promenljiva
n
se inkrementira (pove
ć
a za 1) i ponovo se pristupi primeni koraka 1,2
i 3, kako bi se dobila vrednost konvolucije
[ ]
y n
za novu vrednost promenljive
n
.
Dakle, teorijski gledano, da bi odredili celu diskretnu funkciju
[ ]
y n
, treba izvršiti beskona
č
no
mnogo sumiranja, me
đ
utim prakti
č
no gledano to nikada nije tako. S obzirom na analiti
č
ko
definisanje signala, ili na ograni
č
eno trajanje signala koji ulaze u konvoluciju, problem je mnogo
jednostavniji i bi
ć
e ilustrovan kroz slede
ć
ih nekoliko primera.
Primer 7.1:
Odrediti konvoluciju dve diskretne jedini
č
ne odsko
č
ne funkcije
[ ] [ ] [ ]
*
r n
u n u n
=
(7.7)
Polaze
ć
i od definicionog izraza možemo pisati:
[ ]
[ ] [
]
k
r n
u k u n k
∞
=−∞
=
−
∑
(7.8)
Znaju
ć
i da je
[ ]
0
u k
=
za
i da je
0
k
<
[ ]
1
u k
=
za
, poslednji izraz postaje
0
k
≥
(7.9)
[ ]
[ ] [
]
[
]
0
0
k
k
r n
u k u n k
u n k
∞
∞
=
=
=
−
=
∑
∑
−
Ako u relaciji (7.9) izvršimo smenu promenljivih
n k m
− =
dobija se
(7.10)
[ ]
[ ]
n
m
r n
u m
=−∞
=
∑
Sada postaje jasno da za
poslednja suma ima vrednost 0, za
0
n
<
0
n
=
u sumi postoji samo jedan
sabirak sa vrednoš
ć
u 1, za
n
=1 postoje dva takva sabirka, za
n
=2 tri sabirka i tako dalje, pa onda
možemo pisati
(7.11)
[ ]
(
)
(
)
[ ]
0 ;
0
1
1 ;
0
n
r n
n
u n
n
n
<
⎧⎪
=
=
+
⎨ +
≥
⎪⎩
Signal
[ ]
r n
se obi
č
no naziva jedini
č
nim diskretnim usponskim signalom (u engleskoj literaturi se
koristi naziv
unit-ramp signal
). Ovaj signal je prikazan na slici 7.1.
n
[ ]
(
)
[ ]
1
r n
n
u n
=
+
1 2
3 4
5
Slika 7.1.: Jedini
č
ni diskretni usponski signal
Primer 7.2:
Zanimljiv primer je konvolucija proizvoljnog signala
[ ]
x n
i Dirakovog impulsa
pomerenog za odbiraka u desno:
0
n
[
]
0
n n
δ
−
. Po definiciji ova konvolucija glasi:
(7.12)
[ ] [ ] [
]
[ ] [
]
0
*
k
y n
x n
n n
x k
n n
k
δ
δ
∞
=−∞
=
−
=
−
∑
0
−
Znaju
ć
i da je su svi sabirici poslednje sume jednaki nuli, osim jednog kada je
, lako se
dolazi do rezultata:
0
0
n n
k
− − =
[ ] [
] [ ] [
]
0
0
y n
x n n
x n n
δ
=
−
=
−
0
(7.13)
Dakle, došli smo do važnog zaklju
č
ka da konvolucija proizvoljnog signala
[ ]
x n
i pomerenog
Dirakovog impulsa
[
]
0
n n
δ
−
rezultuje pomerenim signalom
[
]
0
x n n
−
.
Primer 7.3:
Pokažimo kakvo svojstvo ima konvolucija
[ ] [ ] [ ]
*
y n
x n h n
=
ako signali imaju oblik
kakav je prikazan na slici 7.2, odnosno ako je
[ ]
1
0
2
x k
za k n i k n
=
<
>
(7.14)
i
[ ]
3
4
0
h k
za k n i k n
=
<
>

Uzimaju
ć
i u obzir da je signal
x
paran a signal
h
neparan i nakon smene promenljivih
k n m
− =
,
možemo pisati:
[ ]
[ ] [
]
[ ] [
]
[ ]
k
m
y n
x k h k n
h m x n m
y n
∞
∞
=−∞
=−∞
= −
−
−
= −
− −
= − −
∑
∑
(7.21)
što dokazuje da je signal
[ ]
y n
neparan signal.
2.
Ako su signali
[ ]
x n
i
[ ]
h n
oba neparne funkcije, tada je signal
[ ]
y n
parna funkcija.
Dokaz ove osobine je analogan prethodnom dokazu:
[ ]
[ ] [
]
[ ] [
]
[ ] [
] [ ]
k
k
m
y n
x k h n k
x k h k n
h m x n m
y n
∞
∞
∞
=−∞
=−∞
=−∞
=
−
=
−
−
=
− −
=
∑
∑
∑
−
(7.22)
3.
Ako je signal
[ ]
x n
periodi
č
an tada je i signal
[ ]
y n
periodi
č
an.
Pretpostavimo da je signal
x
periodi
č
an sa periodom ponavljanja
N
. Tada možemo pisati:
(7.23)
[
]
[ ] [
]
[ ] [
]
[ ] [
] [ ]
k
k
k
y n N
x k h n N k
h k x n N k
h k x n k
y n
∞
∞
∞
=−∞
=−∞
=−∞
+
=
+ −
=
+ −
=
−
=
∑
∑
∑
što dokazuje navedeno tvr
đ
enje.
4.
Inverzija konvolucije:
[ ] [ ] [ ]
*
y n
x n h n
− = −
−
(7.24)
Da bi dokazali ovu osobinu, ponovo podjimo od definicionog izraza:
[ ]
[ ] [
k
y n
x k h n k
∞
=−∞
]
− =
−
∑
−
m
(7.25)
Uvedimo smenu
i oznake
k
= −
[ ] [ ]
w k
x k
= −
i
[ ] [ ]
v k
h k
= −
. Tada možemo pisati:
(7.26)
[ ]
[ ] [
]
[ ] [
]
[ ] [ ] [ ] [ ]
*
*
m
m
y n
x m h n m
w m v n m
w n v n
x n h n
∞
∞
=−∞
=−∞
− =
−
− +
=
−
=
= −
−
∑
∑
č
ime je tvr
đ
enje dokazano.
5.
Pomerenja konvolucije:
[
] [
] [
]
1
2
1
2
*
y n n
n
x n n
h n n
− −
=
−
−
(7.27)
Dokaz ovog tvr
đ
enje se sprovodi na slede
ć
i na
č
in:
(7.28)
[
]
[ ] [
1
2
1
2
k
y n n
n
x k h n n
n
k
∞
=−∞
− −
=
− −
−
∑
]
Ako u poslednji izraz uvedemo smenu
1
k m n
= −
i oznake
[
]
[ ]
1
x n n
w n
−
=
i
[
] [ ]
2
h n n
v n
−
=
možemo pisati:
(7.29)
[
]
[
] [
]
[ ] [
]
[ ] [ ] [
] [
]
1
2
1
2
1
2
*
*
m
m
y n n
n
x m n h n n
m
w m v n m
w n v n
x n n
h n n
∞
=−∞
∞
=−∞
− −
=
−
− −
=
−
=
=
−
∑
∑
−
6.
Ako sa
ozna
č
imo sumu svih odbiraka signala
x
A
[ ]
x k
:
[ ]
x
k
A
x k
∞
=−∞
=
∑
(7.30)
i sli
č
no tome definišemo
i
h
A
y
A
, tada važi jednakost
y
x
h
A
A A
=
(7.31)
Ovu jednakost
ć
emo dokazati koriš
ć
enjem dvostrukih suma:
[ ]
[ ] [
]
y
n
n
k
A
y n
x k y n k
∞
∞
∞
=−∞
=−∞ =−∞
=
=
∑
∑ ∑
−
(7.32)
Ukoliko sume zamene mesta i
č
lan
[ ]
x k
iza
đ
e ispred sume po
n
jer ne zavisi od
n
, dobi
ć
emo:
[ ] [
]
[ ]
[
]
[
]
y
x
k
n
k
n
n
A
x k h n k
x k
h n k
A
h n k
∞
∞
∞
∞
∞
=−∞ =−∞
=−∞
=−∞
=−∞
=
−
=
−
=
∑ ∑
∑
∑
∑
−
(7.33)
Kona
č
no, ako u preostaloj sumi izvršimo smenu
n k m
− =
dobi
ć
emo izraz (7.33)
7.
Ukoliko definišemo takozvani
centar gravitacije
ili
vreme kašnjenja
signala
[ ]
x n
kao
/
x
nx
D
A
A
x
=
(7.31)
gde je
suma svih
č
lanov
nx
A
[ ]
nx n
, i sli
č
no tome definišemo
i
, tada važi relacija
h
D
y
D
y
x
D
D
D
h
=
+
(7.32)
Dokaz relacije (7.32) se sprovodi slede
ć
im postupkom:
[ ]
[ ]
[ ] [
]
(
)
[ ] [
]
[ ] [
]
(
)
[ ] [
]
[ ]
[
]
[ ] (
)
[
]
/
n
n
k
n
k
y
ny
y
x
h
x
h
n
n
k
n
k
x
h
k
n
k
n
nx
h
x
nh
nx
nh
x
h
x
h
x
h
ny n
n
x k h n k
n k k
x k h n k
D
A
A
A A
A A
y n
k
x k h n k
n k
x k h n k
A A
kx k
h n k
x k
n k h n k
A A
A A
A
A
A A
A A
A
A
∞
∞
∞
∞
∞
=−∞
=−∞
=−∞
=−∞
=−∞
∞
=−∞
∞
∞
∞
∞
=−∞
=−∞
=−∞
=−∞
∞
∞
∞
∞
=−∞
=−∞
=−∞
=−∞
−
− +
−
=
=
=
=
− +
−
−
=
− +
−
−
+
=
=
∑
∑ ∑
∑
∑
∑
∑ ∑
∑
∑
∑
∑
∑
∑
x
h
D
D
=
+
=
+
(7.33)
č
ime je dokaz završen.
Primer 7.4:
Sra
č
unati konvoluciju signala
[ ]
x n
i
[ ]
h n
prikazanih na slici 7.3.

Pitanje 8: Pregled i osobine kontinualnih sistema
Kao što smo ve
ć
rekli, sistem je ure
đ
aj, proces ili algoritam
č
iji je zadatak da obra
đ
uje ili
generiše signale. Mi
ć
emo se u okviru ovog kursa uglavnom baviti sistemima sa jednim ulazom i
jednim izlazom. Sistemi se mogu podeliti u veliki broj kategorija zavisno od njihovih osobina.
Postoje tri klju
č
ne osobine po kojima se sistemi dele u razli
č
ite grupe. Jedna od njih je ve
ć
pomenuta a odnosi se na prirodu signala koje sistem koristi kao svoje ulaze ili koje generiše i
shodno tome se sistemi dele na kontinualne i diskretne. Druga važna osobina je linearnost, pa se
sistemi dele na linearne i nelinearne i kona
č
no tre
ć
a osobina je stacionarnost (nepromenljivost) u
vremenu pa se po toj osobini sistemi dele na stacionarne i nestacionarne ili na vremenski
nepromenljive ili promenljive. U okviru ovog pitanja, bavi
ć
emo se kontinualnim sistemima uopšte.
U okviru linearnih sistema postoje neke specifi
č
ne osobine koje mogu biti zanimljive, pa
ć
emo
otuda izvršiti kratki prikaz takvih sistema.
Sistemi sa memorijom
Za sistem kažemo da ima memoriju ukoliko odziv sistema
( )
y t
u trenutku
zavisi ne
samo od ulaznog signala u tom istom trenku
0
t t
=
( )
0
x t
ve
ć
i od vrednosti uzlaznog signala u nekim
drugim vremenskim trenucima. Dakle, da bismo sra
č
unali izlaz sistema sa memorijom
( )
0
y t
u
trenutku
, potrebno nam je poznavanje ulaznog signala
0
t t
=
( )
x t
u prošlosti (
) ili u
budu
ć
nosti
. U suprotnom, ako je za izra
č
unavanje izlaza
0
t t
<
(
0
t t
>
)
( )
0
y t
dovoljno poznavati
( )
0
x t
kažemo da je sistem bez memorije.
Jednostavan primer sistema bez memorije jeste primena Omovog zakona za izra
č
unavanje
napona na krajevima otpornika kroz koji proti
č
e neka poznata struja
i
:
( )
( )
0
v t
Ri t
=
0
(8.1)
Sa druge strane, ukoliko želimo da sra
č
unamo vrednost napona na krajevima kondenzatora
kapacitivnosti
C
, potrebno je da sra
č
unamo integral
( )
( )
0
0
1
t
v t
i t dt
C
−∞
=
∫
(8.2)
Drugim re
č
ima, ako kao sistem posmatramo kondenzator
č
iji je ulaz struja a izlaz napon na
njegovim krajevima, onda je taj sistem sa memorijom, jer nam je za izra
č
unavanje napona u
trenutku
potrebno poznavanje struje
0
t t
=
( )
i t
za
0
t t
≤
.
Kauzalni sistemi
Za sistem se kaže da je kauzalan ukoliko njegov izlaz
( )
y t
u trenutku
zavisi samo od
ulaza
0
t t
=
( )
x t
za
. Drugim re
č
ima odziv sistema u sadašnjem trenutku ne može zavisiti od
vrednosti ulaznog signala u budu
ć
nosti. Prosto re
č
eno, kauzalan sistem nije 'vidovit' i on ne može
da reaguje pre nego što se na njegovom ulazu pojavi neki signal. Me
đ
utim, bez obzira što nam se
č
ini da jedino kauzalni sistemi imaju smisla i da su svi sistemi u prirodi kauzalni, ipak u teorijskim
razmatranjima se
č
esto pojavljuje potreba za analizom ili uvo
đ
enjem sistema koji nemaju ovu
osobinu.
0
t t
≤
Lako se može proveriti da su otpornik i kondenzator u prethodnom primeru kauzalni sistemi.
Me
đ
utim, primeri sistema definisani slede
ć
im jedna
č
inama (8.3) i (8.4) definišu nekauzalne
sisteme.
(8.3)
( )
( )
0
1
0
t
y t
x t dt
+
−∞
=
∫
i
( ) ( )
0
y t
x t
0
=
−
(8.4)
Na kraju primetimo da su sistemi bez memorije sigurno kauzalni, dok obrnuto ne važi (kauzalni
sistemi ne moraju biti bez memorije).
Linearni sistemi
Linearnost je najpoželjnija osobina koju sistem može da ima. Da bi jedan sistem bio linearan
mora da zadovolji dva svojstva:
1.
Aditivnost.
Aditivnost zna
č
i da ako sistem na ulazni signal
( )
1
x t
generiše odziv
( )
1
y t
, i
ako na ulaz
( )
2
x t
generiše odziv
( )
2
y t
, tada
ć
e na pobudu
( )
( )
(
)
1
2
x t
x t
+
odgovoriti
signalom
.
( )
( )
(
)
1
2
y t
y t
+
2.
Homogenost.
Za sistem kažemo da ispunjava svojstvo homogenosti ako za neku pobudu
( )
x t
odgovori signalom
, tada za pobudu
( )
y t
( )
ax t
treba da generiše na izlazu signal
.
( )
ay t
Ova dva uslova mogu da budu preformulisana u jedan jedini uslov koji se zove svojstvo
superpozicije
, i ono glasi ovako: Ako je sistem na pobudu
( )
1
x t
odgovorio odzivom
( )
1
y t
a na
pobudu
( )
2
x t
odgovorio odzivom
( )
2
y t
, tada sistem na pobudu
( )
( )
(
)
1
2
ax t
bx t
+
treba da
odgovori signalom
( )
(
(
1
2
ay t
by t
+
)
)
, gde su
a
i
b
bilo koje realne ili kompleksne konstante.
Princip superpozicije se može generalizovati na proizvoljan broj sabiraka u ulaznom i
izlaznom signalu. Naime, da bi sistem bio linearan, odnosno zadovoljavao princip superpozicije,
tada on za ulazni signal
( )
( )
k k
k
x t
a x
=
∑
t
(8.5)
treba da generiše odziv
(8.6)
( )
( )
k
k
k
y t
a y t
=
∑
gde je sa
ozna
č
en pojedina
č
ni odgovor sistema na ulazni signal
( )
k
y t
( )
k
x t
.
Opet se jednostavno pokazuje da su otpornik i kondenzator linearni sistemi, dok su sistemi
opisani relacijama (8.7) i (8.8) nelinearni:
( )
( )
(
)
sin
y t
x t
=
(8.7)
ili
( )
( )
2
y t
x t
=
(8.8)
Zanimljivo je da je sistem opisan relacijom
( )
( )
3
y t
x t
4
=
+
(8.9)

ograni
č
en izlaz
(u engleskoj literaturi se ova definicija stabilnosti zove BIBO
Bounded Input-
Bounded Output stability
). Za sistem kažemo da je BIBO stabilan ako iz pretpostavke da je ulazni
signal ograni
č
en, sledi da
ć
e i izlazni signal tako
đ
e biti ograni
č
en po svojoj vrednosti. Matemati
č
ki
zapisano ovaj iskaz izgleda ovako:
( ) ( )
(
) ( ) ( )
1
2
t x t
B
B
t y t
B
∀
≤
⇒ ∃
∀
≤
2
(8.16)
Na osnovu ove definicije zaklju
č
ujemo da je otpornik BIBO stabilan sistem jer:
( )
(
)
( )
( )
1
2
1
2
i t
B
B
RB
v t
Ri t
B
RB
≤
⇒ ∃ =
∴
=
≤
=
1
(8.17)
Me
đ
utim, za kondenzator se ne može re
ć
i da je BIBO stabilan. To se lako i dokazuje.
Pretpostavimo da je struja punjenja kondenzatora konstantna
( )
1
i t
B
=
za
i jednaka nuli za
, odnosno
0
t
≥
0
t
<
( )
( )
1
i t
B u t
=
, gde je
( )
u t
jedini
č
na odsko
č
na funkcija. Tada je napon na njegovim
krajevima
( )
( )
( )
( )
1
1
1
1
t
t
B
v t
i
d
B u
d
r t
C
C
C
τ τ
τ τ
−∞
−∞
=
=
=
∫
∫
(8.18)
gde je sa
jedini
č
na usponska funkcija koja linearno raste sa vremenom i o
č
igledno ne postoji
( )
r t
2
B
tako da je
( )
1
2
B
r t
B
C
≤
za svako
t
.
Invertibilni sistemi
Za sistem se kaže da je invertibilan ukoliko se na osnovu izlaza
( )
y t
jednozna
č
no može
odrediti njegov ulazni signal
( )
x t
. Drugim re
č
ima, sistem je invertibilan ako i samo ako razli
č
iti
ulazni signali generišu razli
č
ite izlazne signale. Tada možemo da generišemo takozvani inverzni
sistem koji za pobudu
( )
y t
generiše odziv
( )
x t
(slika 8.1)
( )
x t
( )
x t
( )
y t
Sistem
Inverzni
sistem
Slika 8.1: Ilustracija invertibilnog sistema i njegovog inverznog sistema
I otpornik i kondenzator su invertibilni sistemi. Tako
đ
e, invertibilni sistemi su i sistemi definisani
relacijama (4.19) i (4.20):
( )
( )
3
y t
x t
=
(8.19)
i
( )
(
)
2
1
y t
x t
3
=
+ +
(8.20)
jer se znaju
ć
i funkciju
( )
y t
jednozna
č
no može odrediti pobuda
( )
x t
. Me
đ
utim, sistemi definisani
relacijama (8.21) i (8.22) nisu invertibilni:
( )
( )
2
y t
x t
=
(8.21)
i
( )
( )
(
)
sin
y t
x t
=
(8.22)
Sve navedene osobine kontinualnih sistema mogu biti zna
č
ajne za pojedine oblasti primene i
analize, me
đ
utim dve najvažnije osobine koje treba da zauzmu centralno mesto u analizi koja
ć
e biti
sprovedena u okviru ovog kursa su linearnost i stacionarnost. Otuda
ć
e posebna pažnja biti
posve
ć
ena ovim dvema osobinama.
Pitanje 9: Linearni stacionarni kontinualni sistemi
Ovakvi sistemi se uobi
č
ajeno u engleskoj literaturi ozna
č
avaju kao LTI (
Linear Time
Invariant Systems
) sistemima. Linearni stacionarni kontinualni sistemi se mogu predstavljati ili
karakterisati na više razli
č
itih na
č
ina, a jedan od njih je koriš
ć
enjem impulsne, Dirakove funkcije.
Otuda se ponovo podsetimo aproksimacije Dirakove funkcije koja je ve
ć
ranije uvedena:
( )
( ) (
)
1
t
u t
u t
δ
=
−
− ∆
⎡
⎤
⎣
⎦
∆
(9.1)
Dalje, primetimo da se proizvoljni kontinualni signal
( )
x t
može dovoljno dobro aproksimirati
stepenastom funkcijom
( )
x t
, pri
č
emu je aproksimacija utoliko bolja ukoliko je interval
∆
kra
ć
i.
Ova aproksimacija je prikazana na slici 9.1.
( )
x t
( )
x t
"
"
t
0
∆
−∆
Slika 9.1: Aproksimacija signala
( )
x t
signalom
( )
x t
Uzimaju
ć
i uobzir definiciju signala
( )
t
δ
relacijom (9.1), lako možemo predstaviti signal
( )
x t
na
slede
ć
i na
č
in:
( )
( ) (
)
k
x t
x k
t k
δ
∞
=−∞
=
∆
− ∆
∑
∆
(9.2)
Sada posmatrajmo grani
č
ni proces kada
∆
teži ka nuli a primenjen na relaciju (9.2)
( )
( ) (
)
0
0
lim
lim
k
x t
x k
t k
δ
∞
∆→
∆→
=−∞
=
∆
− ∆
∑
∆
(9.3)
Jasno je da izraz na levoj strani teži kontinualnom signalu
( )
x t
, me
đ
utim, na desnoj strani se nalaze
grani
č
ni proces pred beskona
č
nom sumom, i kako
∆
teži nuli ta beskona
č
na suma se pretvara u
integral, tako da kona
č
no možemo napisati:
( )
( ) (
)
x t
x
t
d
τ δ
τ
∞
−∞
=
−
∫
τ
(9.4)

Na osnovu njega sra
č
unajmo šta
ć
e biti jedini
č
ni odsko
č
ni odziv
( )
s t
(pod jedini
č
nim odsko
č
nim
odzivom se smatra izlaz sistema ako je njegov ulazni signal jedini
č
na odsko
č
na funkcija
( )
u t
). Na
osnovu rezultata (9.9) možemo pisati:
( ) ( ) ( ) ( ) ( )
( ) (
)
*
*
s t
h t
u t
u t
h t
u
h t
d
τ
τ τ
∞
−∞
=
=
=
−
∫
(9.11)
Uzimaju
ć
i u obzir osobine jedini
č
ne odsko
č
ne funkcije poslednji integral postaje:
( )
(
)
0
s t
h t
d
τ τ
∞
=
−
∫
(9.12)
Nakon smene integracione promenljive
t
τ λ
− =
, dalje možemo pisati
( )
( )
t
s t
h
d
λ λ
−∞
=
∫
(9.13)
S obzirom na oblik definisane funkcije
( )
h
λ
relacijom (9.10), odsko
č
ni odziv sistema postaje
( )
0
0
0 ;
0
0 ;
0
0 ;
0
1
1
;
0
;
0
;
0
t
at
t
a
a
t
t
t
s t
e
e
d
t
e
t
t
a
a
λ
λ
λ
−
−
−
<
⎧
<
⎧
<
⎧⎪
⎪
⎪
=
=
=
⎨
⎨
⎨ −
≥
−
≥
≥
⎪
⎪
⎪
⎩
⎩
⎩
∫
(9.14)
ili u jednostavnijoj formi:
( )
( )
1
at
e
s t
u t
a
−
−
=
(9.15)
Na slici 9.3. su prikazani impulsni i odsko
č
ni odzivi sistema.
( )
h
τ
τ
0
1
( )
s
τ
τ
0
Slika 9.3: Impulsni i odsko
č
ni odzivi sistema
Jedini
č
ni impulsni odziv nije jedina mogu
ć
nost da se sistem opiše. Ukoliko je pobudni signal
( )
x t
napisan u obliku zbira jedini
č
nih odsko
č
nih funkcija:
( )
(
)
k
k
k
x t
a u t t
=
−
∑
(9.16)
tada je korisno sistem opisati jedini
č
nim odsko
č
nim odzivom
( )
s t
, jer se izlazni signal sistema,
koriš
ć
enjem osobine superpozicije, lako sra
č
unava shodno slede
ć
oj relaciji:
( )
(
)
k
k
y t
a s t t
k
=
−
∑
(9.17)
Pitanje 10: Osobine kontinualnih LTI sistema
Kako je objašnjeno u prethodnom pitanju, linearan stacionaran kontinualni sistem je u
potpunosti definisan kroz njegov jedini
č
ni impulsni odziv. Me
đ
utim, zanimljivo je videti kako se
osobine kauzalnosti, stabilnosti i invertibilnosti odslikavaju na ovaj odziv.
Sistem sa memorijom
Kako
izlaz sistema bez memorije može zavisiti samo od trenutnog ulaznog signala
( )
y t
( )
x t
, tada u slu
č
aju linearnog i vremenski invarijantnog sistema, veza izme
đ
u ulaznog i izlaznog
signala mora biti
( )
( )
y t
Kx t
=
(10.1)
gde se parametar
K
naziva poja
č
anjem sistema. U tom slu
č
aju impulsni odziv takvog sistema bez
memorije glasi
( )
( )
h t
K
t
δ
=
(10.2)
Shodno tome možemo zaklju
č
iti da kadgod je impulsni odziv nekog sistema
razli
č
it od nule
za
, u pitanju je sistem sa memorijom.
( )
0
h t
0
0
t
≠
Kauzalni sistem
Kao što smo ve
ć
rekli, osobina kauzalnog sistema je da on ne može da da odgovor na ulazni
signal dok god se taj signal ne pojavi na njegovom ulazu. Dakle, odziv na doga
đ
aj na ulazu koji se
pojavio u trenutku
, za kauzalni sistem, mora biti jednak nuli za svako
. Shodno tome,
impulsni odziv kauzalnog sistema mora biti takav da je
0
t t
=
0
t t
<
( )
0
h t
=
za
0
t
<
(10.3)
Primenjuju
ć
i osobinu kauzalnosti, konvolucioni integral koji definiše odziv kauzalnih sistema
postaje:
( )
( ) (
)
0
y t
h
x t
d
τ
τ τ
∞
=
−
∫
(10.4)
ili, nakon smene promenljivih
t
τ λ
− =
( )
( ) (
)
t
y t
x
h t
d
λ
λ λ
−∞
=
−
∫
(10.5)
Poslednja relacija jasno ukazuje da samo vrednosti
( )
x
λ
gde je
t
λ
≤
uti
č
u na vrednost odziva
u trenutku
t
.
( )
y t
Paralelno sa pojmom kauzalnosti sistema, po ugledu na impulsni odziv kauzalnih sistema,
definišu se i kauzalni signali. Signal
( )
x t
ć
emo zvati kauzalnim ako zadovoljava slede
ć
i uslov
( )
0
x t
=
za
0
t
<
(10.6)
č
ak iako signal
( )
x t
nije ni
č
iji impulsni odziv.

( )
1
h t
( )
2
h t
( )
x t
( )
y t
+
+
( )
( )
( )
1
2
h t
h t
h t
=
+
( )
x t
( )
y t
Slika 10.2: Ekvivalentna reprezentacija paralelne veze dva LTI sistema
Sli
č
no kao i kod kaskadne veze, i u slu
č
aju paralelne veze sistema, dobijeni rezultat se može
generalizovati za proizvoljan broj paralelno vezanih sistema.
Stabilni sistem
BIBO stabilnost LTI kontinualnih sistema se tako
đ
e može jednostavno detektovati na
osnovu jedini
č
nog impulsnog odziva
( )
h t
. Pretpostavimo da je ulazni signal
( )
x t
takav da
zadovoljava slede
ć
u nejednakost:
( )
1
x t
B
≤
, za svako
t
(10.14)
gde je
1
B
pozitivna konstanta.Tada
ć
e apsolutna vrednost odziva sistema biti
( )
( ) (
)
y t
h
x t
d
τ
τ τ
∞
−∞
=
−
∫
(10.15)
Ako se poslužimo
č
injenicom da je apsolutna vrednost integrala uvek manja ili jednaka od integrala
apsolutne vrednosti i da je apsolutna vrednost proizvoda jednaka proizvodu apsolutnih vrednosti,
poslednji izraz postaje:
( )
( ) (
)
( ) (
)
( )
1
y t
h
x t
d
h
x t
d
B
h
d
τ
τ τ
τ
τ τ
τ τ
∞
∞
∞
−∞
−∞
−∞
≤
−
=
−
≤
∫
∫
∫
(10.16)
jer je po pretpostavci
(
)
1
x t
τ
−
≤
B
. Ako je jedini
č
ni impulsni odziv apsolutno integrabilan,
odnosno ako je
( )
h
d
G
τ τ
∞
−∞
= < ∞
∫
(10.17)
tada se na osnovu prethodne dve relacije može pisati
( )
1
y t
B G B
2
≤
=
(10.18)
Drugim re
č
ima, potreban i dovoljan uslov da kontinualan LTI sistem bude BIBO stabilan jeste da
njegov impulsni odziv bude apsolutno integrabilan u smislu relacje (10.17).
Invertibilni sistem
Ve
ć
smo zaklju
č
ili da ukoliko je sistem invertibilan, tada postoji njemu odgovaraju
ć
i
inverzan sistem, takav da ako se veže u kaskadu sa originalnim sistemom, signali na ulazu i izlazu
te kaskade moraju biti identi
č
ni. Ovo tvr
đ
enje važi za svaki signal na ulazu, pa onda važi i u slu
č
aju
kada je ulazni signal Dirakov impuls (slika 10.3). Na ovoj slici je sa
ozna
č
en jedini
č
ni
impulsni odziv inverznog sistema.
( )
I
h t
( )
t
δ
( )
I
h t
( )
t
δ
( )
h t
( )
h t
Slika 10.3:Invertibilni LTI sistem i njegov inverzni sistem
U tom slu
č
aju je jasno da impulsni odziv inverznog sistema mora zadovoljiti slede
ć
u relaciju:
( )
( )
( )
*
I
h t
h t
t
δ
=
(10.19)
Lako se pokazuje da ako inverzni sistem LTI sistema postoji, onda i on mora biti i linearan i
vremenski invarijantan. Ako na ulaz originalnog sistema dovedemo signal
( )
( )
( )
1 1
2 2
x t
a x t
a x t
=
+
,
tada
ć
e se na njegovom ulazu pojaviti signal
( )
( )
( )
1 1
2 2
y t
a y t
a y t
=
+
, što je istovremeno ulaz
inverznog sistema. Da bi on zaista bio inverzan on mora na svom izlazu da generiše signal
( )
( )
( )
1 1
2 2
x t
a x t
a x t
=
+
, što jeste dokaz njegove linearnosti. Sa druge strane ako na ulaz
originalnog sistema dovedemo signal
(
)
0
x t t
−
, na njegovom izlazu
ć
e biti signal
a pak na
izlazu inverznog sistema ponovo
(
0
y t t
−
)
(
)
0
x t t
−
, što dokazuje njegovu stacionarnost. Kao zaklju
č
ak ove
analize možemo tvrditi da ako je sistem invertibilan, mora postojati funkcija
( )
I
h t
koja zadovoljava
relaciju (10.19). Tehnike nalaženja ove funkcije se ne
ć
e razmatrati na ovom mestu, me
đ
utim, ono
što ovde svakako možemo navesti jeste, da
č
ak i ako uspemo da odredimo impulsni odziv inverznog
sistema on uglavnom nema druge važne osobine koje smo ve
ć
pomenuli a to su kauzalnost i
stabilnost.
Jedini
č
ni odsko
č
ni odziv
Ve
ć
smo videli da je opisati sistem pomo
ć
u jedini
č
nog impulsnog odziva vrlo efikasan i
sadržajan na
č
in, jer se pomo
ć
u ove funkcije može odediti odziv sistema za bilo koju pobudu, a
istovremeno se na osnovu impulsnog odziva mogu analizirati sve zna
č
ajne osobine sistema.
Me
đ
utim, u mnogim primenama je jedini
č
ni odsko
č
ni odziv (odziv sistema ako je na njegov ulaz
dovedena jedini
č
na odsko
č
na funkcija) tako
đ
e vrlo korisni na
č
in da se sistem okarakteriše. Jasno je
da se jedini
č
ni odsko
č
ni odziv sistema može sra
č
unati kao konvolucija impulsnog odziva i jedini
č
ne
odsko
č
ne funkcije:
( ) ( ) ( )
*
s t
h t u t
=
(10.20)
Uzimaju
ć
i u obzir specifi
č
nost jedini
č
nog odsko
č
nog signala, poslednji izraz postaje:
( )
( ) (
)
(
)
( )
0
t
s t
u
h t
d
h t
d
h
d
τ
τ τ
τ τ
τ τ
∞
∞
−∞
−∞
=
−
=
−
=
∫
∫
∫
(10.21)
što predstavlja jednostavnu vezu izme
đ
u impulsnog i odsko
č
nog odziva. Kona
č
no, ako se odsko
č
ni
odziv može sra
č
unati kao odgovaraju
ć
i integral impulsnog odziva, o
č
igledno je da se i impulsni
odziv može sra
č
unati kao prvi izvod odsko
č
nog odziva:
( )
( )
ds t
h t
dt
=
(10.22)
Primer 10.1:
Ukoliko nam je poznat odsko
č
ni odziv jednog sistema
( )
( ) ( )
0
cos
s t
t u t
ω
= ⎡
⎤
⎣
⎦
(10.23)
odgovaraju
ć
i impuslni odziv se direktno sra
č
unava primenom relacije (10.22)

Pod pretpostavkom da je partikularno rešenje za
u slede
ć
oj formi
0
t
>
( )
bt
p
y t
Ae
−
=
(11.6)
lako proveravamo da
( )
p
y t
mora da zadovolji slede
ć
i uslov:
( )
( )
( )
1
p
bt
bt
bt
p
dy t
ay t
x t
Abe
aAe
e
bA aA
dt
−
−
−
+
=
⇒ −
+
=
⇒ −
+
=
(11.7)
odnosno
1
A
a b
=
−
(11.8)
Otuda partikularno rešenje glasi:
( )
1
,
bt
p
y t
e
t
a b
−
0
=
>
−
(11.9)
Da bismo dobili signal
( )
h
y t
homogene diferencijalne jedna
č
ine
( )
( )
0
h
h
d y t
ay t
dt
+
=
(11.10)
pretpostavimo rešenje u obliku:
( )
st
h
y t
Ke
=
(11.11)
odakle smenom u (1.10) dobijamo uslov
0
st
st
sKe
aKe
+
=
(11.12)
odnosno
s
a
= −
(11.13)
Tako da homogeno rešenje postaje
( )
at
h
y t
Ke
−
=
(11.14)
uz još uvek neodre
đ
enu vrednost parametra
K
. Kombinuju
ć
i partikularno i homogeno rešenje za
, dobijamo oblik izlaznog signala
0
t
>
( )
1
;
bt
at
y t
e
Ke
t
a b
−
−
0
=
+
>
−
(1.15)
Da bismo odredili vrednost konstante
K
, potrebno je da znamo vrednost
(takozvani
po
č
etni uslov). Smenom u (11.15) dalje možemo pisati
( )
0
I
y
=
Y
( )
1
0
I
y
a b
K Y
=
+
=
−
(11.16)
odnosno
1
I
K Y
a b
= −
−
(11.17)
pa naše kona
č
no rešenje za
postaje
0
t
>
( )
(
)
1
;
at
bt
at
I
y t
Y e
e
e
t
a b
−
−
−
=
+
−
>
−
0 (11.18)
Za
poznato nam je da je ulazni signal jednak nuli
0
t
<
( )
0
x t
=
, pa rešenje po
č
etne diferencijalne
jedna
č
ine mora biti jednako rešenju homogene diferencijalne jedna
č
ine, odnosno
( )
( )
;
at
h
y t
y t
Ke
t
−
0
=
=
<
Y
(11.19)
što uz po
č
etni uslov
( )
0
I
y
=
postaje
( )
;
at
I
y t
Y e
t
−
0
=
<
(11.20)
Kona
č
no, rešenje za
i
mogu biti kombinovana u slede
ć
oj formi
0
t
<
0
t
>
( )
(
)
( )
1
at
bt
at
I
y t
Y e
e
e
u t
a b
−
−
−
=
+
−
−
(11.21)
pri
č
emu je i uslov za trenutak
ispoštovan vo
đ
enjem ra
č
una o po
č
etnom uslovu.
0
t
=
Primetimo da je za
a
razlomak u (1.21) nedefinisan, jer dolazi do deljenja sa nulom. Da
bismo primenom L'Hopital-ovo pravilo uvedimo oznaku
b
=
( )
bt
at
f b
e
e
−
−
=
−
(11.22)
i
( )
g b
a b
= −
(11.23)
Kako je
( )
( )
'
;
'
bt
f b
te
g b
−
1
= −
= −
a
(11.24)
u grani
č
nom procesu kada
b
, dobija se
→
( )
( )
( )
( )
'
'
at
f a
f a
te
g a
g b
−
=
=
(11.25)
odnosno za slu
č
aj
, odziv našeg sistema glasi
a b
=
( )
( )
at
at
I
y t
Y e
te u t
−
−
=
+
(11.26)
Primetimo tako
đ
e da je u slu
č
aju nultog po
č
etnog stanja sistema
(
)
0
I
Y
=
odziv sistema jednak
( )
(
)
( )
1
bt
at
zs
y t
e
e
u t
a b
−
−
=
−
−
(11.27)
Ovakav odziv se zove
odziv iz nultog stanja
ili
odziv relaksiranog sistema.
U suprotnom, da je
postojao samo po
č
etni uslov a da je uzlazni signal jednak nuli
i
Y
( )
0
x t
=
, tada bi odziv sistem bio
( )
at
zi
I
y t
Y e
−
=
(11.28)
Ova vrsta odziva se naziva
odziv na po
č
etne uslove.
O
č
igledno je da se ukupni odziv sistema može
napisati kao zbir odziva relaksiranog sistema i odziva na po
č
etne uslove:
( )
( )
( )
zs
zi
y t
y t
y t
=
+
(11.29)
Ne treba poistove
ć
ivati ove dve vrste odziva sa partikularnim i homogenim rešenjem diferencijalne
jedna
č
ine, jer oni u opštem slu
č
aju nisu jednaki. Me
đ
utim, raš
č
laniti odziv sistema na odzive
( )
zs
y t
i
je vrlo korisno, i tu
ć
emo
č
injenicu
č
esto koristiti.
( )
zi
y t

( )
( )
1
t
y t
i
d
C
τ τ
−∞
=
∫
(11.36)
i
( )
( )
dy t
i t
C
dt
=
(11.37)
diferencijalna jedna
č
ina koja opisuje ovo kolo postaje:
( )
( )
( )
dy t
RC
y t
x
dt
+
=
t
(11.38)
Uvode
ć
i vremensku konstantu
RC
τ
=
i uvode
ć
i smenu
1/
a
τ
=
, diferencijalnu jedna
č
inu možemo
prepisati u formi
( )
( )
( )
dy t
ay t
ax t
dt
+
=
(11.39)
što je ekvivalentno jedna
č
ini (11.30) s tom razlikom da se umesto ulaznog signala
( )
x t
pojavljuje
signal
. Dakle, impulsni odziv ovog sistema glasi
( )
ax t
( )
( )
( )
/
1
at
t
h t
ae u t
e
u t
τ
τ
−
−
=
=
(11.40)
Prednost ovog pristupa je da sada, kada smo odredili jedini
č
ni impulsni odziv sistema, za bilo koji
oblik ulaznog napona
( )
x t
, možemo jednostavno sra
č
unati izlazni napon
primenom
konvolucije
( )
y t
( ) ( ) ( )
*
y t
h t
x t
=
(11.41)
Blok dijagrami
Predstava sistema pomo
ć
u blok dijagrama je vrlo koristan alat, ne samo u smislu
jednostavnijeg razumevanja strukture sistema, ve
ć
je to alat koji u velikoj meri pomaže prilikom
projektovanja razli
č
itih vrsta sistema za obradu signala ili upravljanje. Vrlo
č
esto se ova tehnika
naziva analognim modeliranjem, jer je njena osnovna namena da se princip funkcionisanja sisema
prikaže koriš
ć
enjem tri elementarna bloka a to su: sabira
č
dva signal, množa
č
signala konstantnim
poja
č
anjem i integrator signala. Šematska oznaka za ove blokove je data na slici 11.2.
( )
x t
( )
y t
( )
( ) ( )
z t
x t
y t
=
+
+
+
( )
x t
K
( )
Kx t
( )
x t
( )
x
d
τ τ
∫
( )
y t
( )
y t
Slika 11.2: Šematska oznaka za elementarne blokove u blok dijagramima sistema
Usvajanjem ovakvih oznaka, mi možemo ne samo predstaviti sisteme razli
č
itih struktura, ve
ć
ih
možemo i realizovati jednostavnih elektronskim sklopovima. U kojoj meri
ć
e neko od naših
prakti
č
nih rešenja biti ekonomi
č
no i izvodljivo ne zavisi samo od strukture sistema koji želimo da
realizujemo, ve
ć
i od poznavanja tehnike blokovskih dijagrama. Slede
ć
i primer ilustruje navedenu
č
injenicu.
Primer 11.3:
Posmatrajmo jednostavan sistem koji je opisan diferencijalnom jedna
č
inom
( )
( ) ( ) ( )
( )
2
y t
y t
y t
x t
x t
−
+
=
+
4
(11.42)
gde je radi jednostavnijeg pisanja usvojena oznaka
( )
( )
( )
( )
2
2
/
,
/
y t
d y t dt
y t
dy t dt
=
=
. Ukoliko
želimo da nacrtamo ovaj sistem u blokovskoj formi, ili da ga realizujemo pomo
ć
u elementarnih
elektronskih komponenti, možemo postupiti na dva na
č
ina.
Direktna realizacija:
U želji da se oslobodimo izvoda u relaciji (11.42) integralimo celu jedna
č
inu
dva puta. Dobijenu jedna
č
inu možemo zapisati u formi:
( )
( )
( )
( )
( )
1
2
1
2
2
y t
y t
y t
x t
x t
−
+
=
+
4
(11.43)
gde je radi jednostavnijeg pisanja za višestruki
i-ti
integral signala
( )
y t
uvedena oznaka
( )
i
y t
i
analogno tome za signal
( )
x t
. Ako poslednju relaciju napišemo u formi
( )
( )
( )
( )
( )
1
2
1
2
2
y t
y t
y t
x t
x t
=
−
+
+
4
(11.44)
blokovska reprezentacija direktno sledi (zbog toga se i zove direktna realizacija) i prikazana je
slikom 11.3.
( )
x t
( )
y t
( )
1
y t
( )
2
y t
( )
1
x t
( )
2
x t
2
1
−
4
+
+ + +
Slika 11.3: Direktna realizacija sistema
Primetimo da nam je za direktnu realizaciju sistema potrebno
č
etiri integratora, dva poja
č
ava
č
a,
jedan invertor i jedan sabira
č
. A pogledajmo sada drugi pristup u blokovskoj predstavi, odnosno
realizaciji, koji se naziva kanoni
č
na realizacija.
Kanoni
č
na realizacija
: Ako ponovo krenemo od relacije (11.42) ali je prepišemo na slede
ć
i na
č
in:
( )
( )
( )
( )
( )
( ) ( )
( )
( )
( ) ( )
( )
( )
(
)
1
2
1
2
1
1
2
4
2
2
4
t
t
y t
y t
y t
x t
x t
y
x
y
x
dt
y
x
y
x
d
d
τ
τ
τ
τ
τ
τ
τ
λ
λ
λ τ
−∞
−∞
−∞
=
−
+
+
=
+
−
+
4
⎡
⎤
⎣
⎦
⎡
⎤
=
+
+
−
+
⎢
⎥
⎣
⎦
∫
∫
∫
(11.45)
Poslednja relacija govori o tome da se signal
( )
y t
može dobiti kao izlaz iz integratora kome je na
ulaz doveden zbir tri signala
,
( )
2
y t
( )
x t
i izlaz iz integratora koji na ulazu ima zbir dva signala
i
( )
y t
−
( )
4
x t
. Odgovaraju
ć
a blokovska realizacija je prikazana na slici 11.4.

Istini za volju, u obradi signala se
č
esto pojavljuje potreba za nekauzalnim sistemima,
me
đ
utim oni se mogu primeniti isklju
č
ivo u takozvanom
off-line
postupku, kada su svi odbirci
signala ve
ć
zabeleženi, i kada se nad njima naknadno vrši obrada. Jedan od takvih filtara je
takozvano centrirano prozorsko usrednjavanje definisano slede
ć
om relacijom:
(12.3)
[ ]
[ ]
0
0
2
0
2
n
n n
y n
x n
+
= −
=
∑
Linearni diskretni sistemi
Analogno kao kod kontinualnih signala, za diskretni sistem kažemo da je linearan ukoliko
zadovoljava dva svojstva: aditivnost i homogenost.
Sistem zadovoljava uslov aditivnosti ukoliko na pobudu
[ ]
[ ]
1
2
x n
x n
+
generiše odziv
[ ]
[ ]
1
2
y n
y n
+
, gde su
[ ]
1
y n
i
[ ]
2
y n
pojedina
č
ni odzivi na pobude
[ ]
1
x n
i
[ ]
2
x n
, respektivno. Sa
druge strane, za sistem kažemo da zadovoljava uslov homogenosti ukoliko za pobudu
[ ]
ax n
generiše odziv
[ ]
ay n
, gde je sa
[ ]
y n
obeležen odziv sistema za pobudu
[ ]
x n
.
Svojstva aditivnosti i homogenosti su istovremeno sadržana u principu superpozicije koji
kaže da sistem zadovoljava ovaj princip ukoliko za pobudu
[ ]
[ ]
1 1
2 2
a x n
a x n
+
generiše odziv
[ ]
[ ]
1 1
2 2
a y n
a y n
+
gde su
[ ]
1
y n
i
[ ]
2
y n
pojedina
č
ni odzivi na pobude
[ ]
1
x n
i
[ ]
2
x n
, respektivno.
Vremenski invarijantni sistemi
Vremenski invarijantni diskretni sistemi podrazumevaju da se pomeraj u ulaznom signalu
direktno preslikava u pomeraj u odzivu sistema. Drugim re
č
ima, ako je odziv sistema na pobudu
[ ]
x n
bio
[ ]
y n
, tada
ć
e odziv na pobudu
[
]
0
x n n
−
biti
[
]
0
y n n
−
. Ako je ovo tvr
đ
enje ta
č
no za bilo
koji ulazni signal i bilo koji pomeraj, sistem je vremenski invarijantan.
Stabilnost diskretnih sistema
Za diskretni sistem kažemo da je stabilan u smislu ograni
č
en ulaz- ograni
č
en izlaz (BIBO
stabilnost) ukoliko za proizvoljni pobudni signal koji zadovoljava uslov
[ ]
1
x n
B
≤
(12.4)
dobijamo odziv
[ ]
y n
ograni
č
en po svojoj amplitudi, odnosno
[ ]
2
y n
B
≤
(12.5)
za kona
č
ne konstante
1
B
i
2
B
.
Primer BIBO stabilnog sistema je takozvano jedin
č
no kašnjenje:
[ ] [
]
1
y n
x n
=
−
(12.6)
Jednostavno se dokazuje da je ovakav sistem BIBO stabilan:
[ ]
[
]
1
1
y n
x n
B
=
− ≤
(12.7)
dok je primer nestabilnog sistema takozvani sabira
č
(ili akumulator)
(12.8)
[ ]
[ ]
n
k
y n
x k
=−∞
=
∑
Ako pretpostavimo da smo na ulaz sabira
č
a doveli jedini
č
nu odsko
č
nu funkciju koja je ograni
č
ena,
na izlazu dobijamo
(12.9)
[ ]
[ ] [ ]
n
k
y n
u k
r n
=−∞
=
=
∑
gde je sa
[ ]
r n
ozna
č
ena jedini
č
na diskretna usponska funkcija i koja teži beskona
č
nosti kako
promenljiva
n
raste.
Invertibilni sistemi
Kao i za slu
č
aj kontinualnih sistema, za diskretni sistem kažemo da je invertibilan ukoliko
njegov ulazni signal
[ ]
x n
jednozna
č
no može biti odre
đ
en na osnovu njegovog izlaza
[ ]
y n
. Drugim
re
č
ima, sistem je invertibilan ukoliko razli
č
iti ulazi generišu razli
č
ite izlaze. Dakle, ako je sistem
invertibilan može se odrediti njegov inverzni sistem koji za ulaz
[ ]
y n
generiše odziv
[ ]
x n
, kako je
to prikazano na slici 12.1.
[ ]
x n
[ ]
x n
[ ]
y n
Sistem
Inverzni
sistem
Slika 12.1: Primer sistema i njegove inverzije
Primer invertibilnog sistema je diskretni sabira
č
ili akumulator. Njegov inverzni sistem je opisan
slede
ć
om relacijom:
[ ] [ ] [
]
1
x n
y n
y n
=
−
−
(12.10)
Pitanje 13: Diskretni linearni vremenski invarijantni (LTI) sistemi
Sve napred navedene osobine diskretnih sistema su važne, me
đ
utim posebnu pažnju
zahtevaju osobine linearnosti i vremenske invarijantnosti. Zbog toga
ć
e sistemima koji imaju ova
dva svojstva biti posve
ć
eno više prostora i kao i u slu
č
aju kontinualnih sistema bi
ć
e koriš
ć
ena
oznaka LTI (
Linear Time Invariant
) sistem. Jedan od fundamentalnih na
č
ina da se ovakav sistem
opiše jeste njegov impulsni odziv, jer
ć
e se kasnije pokazati da odziv sistema na bilo koju pobudu
može da se sra
č
una kao konvolucija impulsnog odziva i te pobude.
Da bismo došli do ovog rezultata po
đ
imo od proizvoljnog pobudnog signala
[ ]
x n
. Uzmimo
za primer signal
[ ]
(
)
[
] [
]
(
)
2
1
x n
n
u n
u n
=
+
+ −
−
3 (13.1)
prikazan slikom 13.1.

Do rezultata smo došli primenom principa superpozicije, a da konvoluciju nismo ni pomenuli. Do
o
č
ekivanog rezultata
ć
emo do
ć
i ukoliko u relaciji (13.6) izvršimo smenu
[ ]
k
a
x k
=
,
č
ime dobijamo
relaciju (13.4) i direktno odatle dolazimo do vrlo važnog rezultata da je odziv sistema na bilo koju
pobudu jednak konvoluciji impulsnog odziva i pobude:
(13.8)
[ ]
[ ] [
] [ ] [ ]
*
k
y n
x k h n k
x n h n
∞
=−∞
=
−
=
∑
Kako je konvolucija komutativna operacija, poslednji izraz se može po potrebi napisati i u slede
ć
oj
formi
(13.9)
[ ]
[ ] [
] [ ] [ ]
*
k
y n
h k x n k
h n x n
∞
=−∞
=
−
=
∑
Primer 13.1:
Sra
č
unajmo odziv sistema
č
iji je impulsni odziv
[ ] [ ] [
]
h n
u n
u n N
=
−
−
(13.10)
na pobudu
[ ] [ ] [
]
1
x n
n
n
δ
δ
=
−
−
(13.11)
Ovi signali su prikazani na slici 13.3.
[ ]
x n
1
n
1
−
1
0
[ ]
h n
1
n
0
"
1
N
−
Slika 13.3: Pobuda i impulsni odziv sistema
Do rešenja se jednostavno može do
ć
i na dva na
č
ina. Prvi je principom superpozicije. Naime, ako je
pobuda sistema predstavljena algebarskim zbirom dva imulsna signala
[ ] [ ] [
]
1
x n
n
n
δ
δ
=
−
−
(13.12)
onda je odziv sistema jednak zbiru dva pomerena impulsna odziva:
[ ] [ ] [
]
[ ] [
]
(
)
[
] [
]
(
)
1
1
y n
h n
h n
u n
u n N
u n
u n N
=
−
− =
−
−
−
− −
− −
1 (13.13)
Poslednji izraz se može napisati u formi:
[ ]
[ ] [
]
(
)
[
] [
]
(
)
[ ] [
]
1
1
y n
u n
u n
u n N
u n N
n
n N
δ
δ
=
−
−
−
−
−
− −
=
−
−
(13.14)
Do potpuno identi
č
nog rezultata se moglo do
ć
i primenom konvolucije:
(13.15)
[ ]
[ ] [
]
[
]
[ ]
[ ] [
]
(
)
[ ]
[ ]
[
]
[
]
[ ] [
] [
] [
] [ ] [
]
1
0
1
1
1
1
1
1
N
n
k
k
k n N
n
n
n N
n
n
m n N
m
m
m
m
y n
h k x n k
x n k
x m
m
m
m
m
m
m
u n
u n
u n N
u n N
n
n N
δ
δ
δ
δ
δ
δ
δ
δ
∞
−
=−∞
=
= − +
−
−
= − +
=−∞
=−∞
=−∞
=−∞
=
−
=
−
=
=
−
−
=
−
−
− +
=
−
− −
−
+
− − =
−
−
∑
∑
∑
∑
∑
∑
∑
∑
1
N
−
Ovaj rezultat je prikazan na slici 13.4.
[ ]
y n
1
n
1
−
N
0
Slika 13.4: Odziv sistema
Primer 13.2:
Sra
č
unajmo odsko
č
ni odziv diskretnog LTI sistema
č
iji je impulsni odziv dat:
[ ]
[ ]
n
h n
a u n
=
(13.16)
Polaze
ć
i od
č
injenice da je odziv linearnog stacionarnog diskretnog sistema na bilo koju pobudu
jednak diskretnoj konvoluciji te pobude i impulsnog odziva, možemo pisati:
(13.17)
[ ] [ ] [ ]
[ ] [
]
*
k
s n
u n h n
u k h n k
∞
=−∞
=
=
∑
−
Uzimaju
ć
i u obzir osobine jedini
č
ne odsko
č
ne funkcije poslednja suma se može pojednostaviti:
[ ]
[
]
0
k
s n
h n k
∞
=
=
−
∑
(13.18)
ili nakon smene promenljivih
n k m
− =
(13.19)
[ ]
[ ]
n
m
s n
h n
=−∞
=
∑
Poslednja relacija definiše vezu izme
đ
u jedini
č
nog odsko
č
nog i jedini
č
nog impulsnog odziva
diskretnih sistema. Dakle, umesto integrala kod kontinualnih sistema, kod diskretnih sistema se
odsko
č
ni odziv definiše preko sume odbiraka impulsnog odziva, i obrnuto, umesto izvoda kod
kontinualnih sistema, impulsni odziv se može sra
č
unati kao kona
č
na jednokora
č
na razlika
odsko
č
nog odziva:
[ ] [ ] [
]
1
h n
s n
s n
=
−
−
(13.20)
U našem slu
č
aju gde je impulsni odziv definisan relacijom (13.6), odsko
č
ni odziv postaje:
[ ]
[ ]
[ ]
[ ]
1
0
0 ;
0
1
;
0
1
n
n
n
m
n
m
m
m
m
n
a
s n
h m
a u m
u n
a
n
a
+
=−∞
=−∞
=
<
⎧
−
⎪
=
=
=
=
⎨
≥
−
⎪⎩
∑
∑
∑
(13.21)

Pitanje 14: Osobine diskretnih linearnih vremenski invarijantnih (LTI) sistema
Po analogiji sa kontinualnim sistemima, cilj nam je da se kroz ovo pitanje analiziraju
svojstva impulsnih odziva koji zadovoljavaju ili ne zadovoljavaju osobine kao što su kauzalnost,
posedovanje memorije, stabilnost i invertibilnost.
Sistemi sa memorijom
Linearni, vremenski invarijantan diskretni sistem bez memorije je definisan relacijom
[ ]
[ ]
y n
Kx n
=
(14.1)
pa je samim tim njegov impulsni odziv
[ ]
[ ]
h n
K
n
δ
=
(14.2)
Zaklju
č
ujemo da ako impulsni odziv nekog sistema zadovoljava uslov da je
[ ]
0
0
h n
≠
za neko
, da je u pitanju sistem sa memorijom.
0
0
n
≠
Kauzalni sistem
Kauzalnost podrazumeva da sistem ne može da generiše odgovor, odnosno odziv, pre nego
što se pobuda pojavi na njegovom ulazu. Dakle, impulsni odziv
[ ]
h n
nekog kauzalnog sistema
mora da zadovolji uslov:
[ ]
0
h n
za n
0
=
<
(14.3)
U slu
č
aju kauzalnih sistema, konvolucija kojom se sra
č
unava odziv sistema
[ ]
y n
na proizvoljnu
pobudu
[ ]
x n
može da se napiše u pojednostavljenoj formi:
(4.4)
[ ] [ ] [ ]
[ ] [
]
[ ] [
]
[ ] [
]
0
*
n
k
k
l
y n
h n x n
h k x n k
h k x n k
x l h n l
∞
∞
=−∞
=
=−∞
=
=
−
=
−
=
∑
∑
∑
−
Iz poslednje jednakosti se jednozna
č
no vidi da na vrednost odziva
[ ]
y n
uti
č
u isklju
č
ivo odbirci
signala
[ ]
x l
za
.
l n
≤
Kaskadna veza
Pod kaskadnom vezom dva diskretna signala podrazumevamo takvu vezu u kojoj je izlaz
prvog sistema istovremeno ulaz drugog, kako je to prikazano na slici 14.1.
[ ]
x n
[ ]
w n
[ ]
y n
[ ]
1
h n
[ ]
2
h n
Slika 14.1: Kaskadna veza dva linearna diskretna sistema
Na osnovu slike 14.1. odziv
[ ]
y n
možemo napisati u slede
ć
oj formi:
[ ]
[ ] [ ]
[ ] [ ]
[ ]
2
1
*
*
*
y n
w n h n
x n h n
h n
⎡
⎤
=
= ⎣
⎦
2
(14.5)
U
kretne konvolucije, poslednji
zimaju
ć
i u obzir osobine komutativnosti i asocijativnost operacije dis
izraz se može napisati i u slede
ć
oj formi:
[ ] [ ]
[ ] [ ]
[ ] [ ]
[ ]
1
*
*
*
*
y n
x n
h n h n
x n h n
h n
⎡
⎤ ⎡
⎤
=
=
⎣
(14.6)
2
2
1
⎦ ⎣
⎦
to zna
č
i da u kaskadnoj vezi LTI sistemi mogu menjati svoja mesta. D
kaskadna veza dva LTI sistema može ekvivalentno predstaviti jednim LTI sistemom koji ima
š
rugi zaklju
č
ak je da se
impulsni odziv jednak konvoluciji impulsnih odziva po
č
etnih sistema u kaskadi. Ove dve
ekvivalentne strukture su prikazane na slici 14.2.
[ ]
x n
[ ]
y n
[ ]
1
h n
[ ]
2
h n
[ ]
x n
[ ]
y n
[ ] [ ]
1
2
*
h n h n
Slika 14.2: Strukture ekvivalentne kaskadnoj vezi sa slike 5.6
istema se podrazumeva veza dva sistema koji imaju
u se njihovi odzivi sabiraju i formiraju zajedni
č
ki izlaz, kako je to
Paralelna veza dva LTI sistema
Pod paralelnom vezom dva LTI s
zajedni
č
ki ulazni signal i pri
č
em
prikazano na slici 14.3.
[ ]
1
h n
[ ]
2
h n
[ ]
x n
[ ]
y n
+
+
Slika 14.3: Paralelna veza dva LTI sistema
Na osnovu slike 14.3, možemo izra
č
unati odziv sistema
[ ]
y n
na slede
ć
i na
č
in:
[ ] [ ] [ ] [ ] [ ]
1
2
*
*
y n
x n h n
x
n
=
+
n h
(14.7)
zimaju
ć
i u obzir osobinu distributivnosti operacije konvolucije n
ć
i na
č
in:
U
ad sabiranjem, poslednji izraz se
može napisati na slede
[ ] [ ]
[ ]
[ ]
1
2
*
y n
x n
h n
h n
⎡
⎤
=
+
⎣
⎦
to nam govori da se paralelna veza dva LTI sistema ekvivalen
č
iji je impulsni odziv jednak zbiru impulsnih odziva sistem
(14.8)
š
tno može predstaviti kao jedan LTI
sistem
a u paraleltnim granama (slika
14.4).
[ ]
[ ]
[ ]
1
2
h n
h n
h n
=
+
[ ]
x n
[ ]
y n
Slika 14.4: Sistem ekvivalentan paralelnoj vezi dva LTI sistema
Stabilnost sistema
se vrlo jednostavno može proveriti pomo
ć
u
. Pretpostavimo da je ulazni signal
BIBO stabilnost diskretnog LTI sistem
impulsnog odziva
a
[ ]
h n
[ ]
x n
takav da zadovoljava slede
ć
i
uslov:

Pod tom pretpostavk
puls, na njegovom
om, ako na ulaz originalnog sistema dovedemo diskretni im
izlazu
ć
e se pojaviti impulsni odziv
[ ]
h n
a na izlazu iznverznog sistema,
č
iji je impulsni odziv
ozna
č
en sa
[ ]
I
h n
ć
e se pojaviti ponovo
retni impuls. Tada možemo pisati:
∞
disk
=−∞
=
−
=
∑
(14.17)
Drugim re
č
ima, da bi LTI diskretni sistem bio invertibilan, potrebno je da postoji signal
[ ] [ ]
[ ] [
] [ ]
*
I
I
k
h n h n
h k h n k
n
δ
[ ]
I
h n
koji
itanje 15: Diferencne jedna
č
ine i njihova primena
Uloga diferencnih jedna
č
ina u domenu diskretnih sistema je potpuno analogna ulozi
k
k
k
k
n k
=
=
zadovoljava relaciju (14.17) i to
ć
e biti impulsni odziv njegovog inverznog sistema. Postupak za
nalaženje impulsnog odziva inverznog sistema, ako on postoji, može biti vrlo složen, me
đ
utim i
ukoliko on postoji i mi ga izra
č
unamo, vrlo
č
esto taj inverzni sistem nema neke od nama važnih
osobina kao što su kauzalnost i stabilnost.
P
diferencijalnih jedna
č
ina u prostoru kontinualnih sistema. Opšta forma linearne diferencne
jedna
č
ine
N
-tog reda sa konstantnim koeficijentima jeste
[
]
N
M
a y n k
b x
[
]
0
0
−
=
∑
∑
−
(15.1)
je diferencijalne jedna
č
ine se uvek može napisati u obliku:
Opšte rešen
[ ]
[ ]
[ ]
p
h
y n
y n
y n
=
+
(15.2)
de je sa
[ ]
p
y n
ozna
č
eno partikularno rešenje koje zadovoljava jedna
č
inu (15.1), a sa
[ ]
h
y n
je
g
ozna
č
eno homogeno rešenje koje zadovoljava diferencnu jedna
č
inu
[
]
0
N
a y n k
0
k
k
=
−
=
∑
(15.3)
č
emu se egzaktna forma homogenog rešenja dobija na osnovu dodatnih po
pri
č
etnih uslova signala
[ ]
y n
.
rimer 15.1:
Posmatrajmo diferencnu jedna
č
inu prvog reda
P
[ ]
[
] [ ]
1
y n
ay n
x n
−
− =
(15.4)
de je
g
[ ]
x n
kauzalni signal
[ ]
[ ]
n
x n
b u n
=
(15.5)
onovo
ć
emo rešenje diferencne jedna
č
ine tražiti posebn
P
o za
0
n
≥
i za
0
n
<
. Pretpostavimo da je
partikularno rešenje
[ ]
p
y n
za
0
n
≥
u obliku:
[ ]
n
p
y n
Ab
=
(15.6)
menom u relaciju (15.4) dobijamo:
n
S
1
n
n
Ab
aAb
b
−
−
=
(15.7)
odnosno
b
Ab Aa b
A
b a
−
= ⇒ =
−
(15.8)
akle, partikularno rešenje za nenegativno
n
glasi:
D
[ ]
1
n
b
y n
+
;
0
p
n
b a
=
≥
−
(15.9)
ogeno rešenje
Hom
[ ]
h
y n
treba da zadovolji relaciju:
[ ]
[
]
1
0
h
h
y n
ay n
−
− =
(15.10)
svojmo ovo rešenje u obliku:
U
[ ]
n
h
y n
Kc
=
(15.11)
de posle zamene u (15.10) dobijamo:
n
g
n
1
0
0
Kc
aKc
−
Kc aK
c a
−
= ⇒
−
= ⇒ =
(15.12)
akle, homogeno rešenje glasi:
D
[ ]
n
h
y n
Ka
=
(15.13)
ombinuju
ć
i partikularno i homogeno rešenje za nenega
K
tivno
n
, dobijamo
[ ]
1
;
0
n
n
b
y n
Ka
n
+
b a
=
+
≥
−
(15.14)
o odredili nepoznatu konstantu
K
potreban nam je jedan po
Da bism
č
etni uslov, recimo
[ ]
1
y
Y
i
− =
.
Tada možemo pisati:
[ ]
[ ]
[ ]
0
1
1
0
1
I
b
y
ay
y
aY
b a
−
− = ⇒
=
+ =
+
−
K
(15.15)
dnosno
o
;
0
i
a
K
aY
n
b a
=
−
≥
−
(15.16)
ona
č
no rešenje za nenegativno
n
postaje
K
1
1
1
,
0
n
n
n
[ ]
i
y n
Y a
=
b
a
n
b a
+
+
+
−
+
≥
−
(15.17)
a
originalna diferencna jedna
č
ina postaje homogena j
[ ]
0
x n
=
. Dakle, za
0
n
<
Z
er je
0
n
<
rešenje diferencne jedna
č
ine je
[ ]
[ ]
,
0
n
h
y n
y n
Ka
n
=
=
<
(15.18)
de se vrednost nepoznatog parametra
K
ponovo odre
đ
uj
g
e iz postoje
ć
eg po
č
etnog uslova
[ ]
1
i
y
Y
− =
, dakle
1
;
0
i
i
Ka
Y
K Y a n
−
= ⇒
=
<
(15.19)
a kona
č
no rešenje za negativno
n
postaje:
p
[ ]
1
;
0
n
i
y n
Y a
n
+
=
<
(15.20)
ešenja (15.17) i (15.20) se mogu objediniti u jedan zapis n
R
a slede
ć
i na
č
in:

i
kašnjenje, dobijamo blok
odatle, direktnim postupkom, koriš
ć
enjem odgovaraju
ć
ih blokova za
dijagram. Ovakav blok dijagram je prikazan na slici 15.2.
D
D
D
D
2
1
−
3
2
−
[ ]
y n
[ ]
x n
[
]
1
x n
−
[
]
2
x n
−
[
]
1
y n
−
[
]
2
y n
−
+
+ +
+
Slika 15.2: Blok dijagram sistema dobijen direktnim postupkom
Iako je direktni postupak vrlo jednostavan u smis
a diskretnog sistema, on
ima jedan vrlo važan nedostatak, a to je broj elemenata za kašnjenje. Primetimo, sa slike 15.2, da je
lu dobijanja blok dijagram
broj ovih elemenata jednak 4.
Drugi postupak za dobijanje blok strukture sistema jeste takozvana kanoni
č
na realizacija.
Postupak se sadrži u slede
ć
em: uvedimo oznaku
[ ]
{ }
[
]
1
D y n
y n
=
−
, gde se
D
tuma
č
i kao operator
koji primenjen na neki signal vrši njegovo kašnj j jed n p riod odabiranja. Tada relaciju
(15.26) možemo napisati na slede
ć
i na
č
in:
[
en e za
a
e
]
[
] [
]
[
]
[
]
2
1
2
3
1
2
2
y n
y n
y n
x n
x n
=
− −
− +
− −
−
[ ] [
]
[ ]
[
]
{
}
[ ]
[ ]
[ ]
[ ]
{
{
}
}
2
1 3
2
1
2
3
2
D
y n
y n
x n
x n
D
y n
x n
D
y n
x n
=
−
− +
−
−
=
+
+
−
−
(15.27)
Poslednji rezultat se može tuma
č
iti na slede
ć
i na
č
in: Signal
[ ]
y n
se može dobiti kao izlaz iz
elementa za jedini
č
no kašnjnje, ako se na ulaz tog elementa dovede zbir tri signala, od kojih je prvi
[ ]
2
y n
, drugi
[ ]
3
x n
a tre
ć
i opet izlaz iz drugog elementa za kašn
kome je na ulaz doveden zbir
signa
[
jenje
la
]
[ ]
2
y n
x n
−
−
. Ova ideja je realizovana na slici 15.3. i naziva se kanoni
č
nim blok
dijagram
a.
om diskretnog sistem
[ ]
y n
D
D
3
2
1
−
2
−
[ ]
x n
+
+
+
+
+
Slika 5.3: Kanoni
č
ni blok dijagram diskretnog sistema
č
igledno da je ovakav, kanoni
č
ni blok dijagram, mnogo povoljniji sa aspekta projektovanja i
alizacije sistema s obzirom da je u njega uklju
č
eno dva elemenata za kašnjenje, što zapravo
predstavlja red diferencne jedna
č
ine kojom je sistem definisan u relaciji (15.25).
O
re
Furijeova analiza vremenski kontinualnih signala
U dosadašnjim predavanjima smo izvršili analizu svih zna
č
ajnijih osobina signala do kojih
enu. Me
đ
utim
se može do
ć
i ukoliko te signale posmatramo u vremenskom dom
vekova unazad razvijene su tehnike transformacije signala koje p
, ve
ć
nekoliko
ružaju zna
č
ajne a ponekad i
om devetnaestog veka, a
olaze
ć
nog LTI sistema
pogodnije alate za analizu i sintezu signala i sistema. Vrlo
č
esto je priroda nekih signala sa kojima
se sre
ć
emo svakodnevno, baš takva da je krajnje primerena tim tehnikama. Jedna od tih tehnika
jeste transformacija u
frekvencijski domen
. Frekvencijski domen signala nije ništa drugo nego jedan
druga
č
iji pogled na svet oko nas i vrlo
č
esto se neki, ina
č
e vrlo složeni problemi u vremenskom
domenu, vrlo jednostavno rešavaju analizom u frekvencijskom domenu.
Prvi skup takvih transformacija jesu
Furijeova serija
i
Furijeova transformacija
vremenski
kontinualnih signala. Ove transformacije su dobile imena po francuskom matemati
č
aru
J.B.J.
Fourier
-u koji je postavio teorijske osnove ovih transformacija po
č
etk
p
i od nau
č
nih radova
Euler-
a iz osamnaestog veka. Osnovni motiv zbog koga se Fourier
bavio ovim problemom jeste pokušaj da se opiše propagacija i širenje toplote, dok se Euler bavio
analizom vibracije struna ži
č
anih instrumenata. Me
đ
utim, dobijeni rezultati su bili u toj meri opšti
da su našli primenu u gotovo svim oblastima nauke i tehnike.
Pitanje 16: Sopstvene funkcije kontinualnih LTI sistema
( )
x t
Pretpostavimo da se ulazni ili pobudni signal jednog kontinual
može
apisati u slede
ć
oj formi:
n
( )
( )
k k
k
x t
a
t
φ
=
∑
(16.1)
gde je skup funkcija
na neki na
č
in pogodno izabran i naziva se bazisom funkcija,
sa
su ozna
č
ene odgovaraju
ć
e konstant
zadovoljava osobine homogenosti i aditivnosti, tako da se odziv sistema na ovu pobudu može
rmi:
pri
č
emu je sa
( )
,
0,1, 2,...
k
t k
φ
=
a
e. Znaju
ć
i da je naš sistem linearan, on
,
0,1, 2,...
k
a k
=
napisati u slede
ć
oj fo
( )
( )
k
k
k
y t
a
t
ψ
=
∑
(16.2)
( )
k
t
ψ
ozna
č
en odziv sistema na pobudu
( )
k
t
φ
, odnosno, ako sa
ozna
č
imo
pulsni odziv sistema, slede
ć
a relacija je u važnosti:
( )
h t
im
( )
( ) ( )
*
k
k
t
t
h t
ψ
φ
=
Ovo je vrlo važan rezultat koji se može iskoristiti u
(16.3)
velikom broju razli
č
itih primera, me
đ
utim,
č
aj postaje još ve
ć
i ukoliko za bazis funkcija
njegov zna
( )
izaberemo takve funkcije da su one
k
t
φ
istog oblika kao i funkcije
t
( )
k
ψ
i da se razlikuju samo u jednoj multiplikativnoj konstanti:
( )
( )
k
k k
t
b
t
ψ
φ
=
jer tada ulaz sistema (16.1) i izlaz sistema (16.2) imaju istu formu. Tada se odziv sistem
(16.4)
a
( )
y t
,
umesto relacije (16.2) može napisati u obliku:
(16.5)
( )
( )
k k
k
y t
c
t
φ
=
∑

izrazi (16.11) i (16.12) preras
o da je
s
č
isto
im
taju u integrale umesto u sume. Ako još usvojim
aginarni broj
s
j
ω
=
, dobija se Fourier-ova transformacija. Ako d
768 in Auxerre, Bourgogne, France
Died:
16 May 1830 in Paris, France
ozvolimo da
s
bude proizvoljna
kompleksna varijabla, dobija se kao rezultat Laplace-ova transformacija. O tome
ć
emo detaljnije
govoriti u ovom i slede
ć
em poglavlju.
Jean Baptiste Joseph Fourier
Born:
21 March 1
Joseph Fourier
's father was a tailor in Auxerre. After the death of his first wife, with whom he had three children, he
remarried and Joseph was the ninth of the twelve children of this second marriage. Joseph's mother died went he was
nine years old and his father died the following year.
His first schooling was at Pallais's school, run by the music master from the cathedral. There Joseph studied Latin and
French and showed great promise. He proceeded in 1780 to the École Royale Militaire of Auxerre where at first he
showed talents for literature but very soon, by the age of thirteen, mathematics became his real interest. By the age of
14 he had completed a study of the six volumes of
Bézout
's
Cours d mathématiques.
In 1783 he received the first prize
e
for his study of
Bossut
's
Mécanique en général.
In 1787 Fourier decided to train for the priesthood and entered the Benedictine abbey of St Benoit-sur-Loire. His
interest in mathematics continued, however, and he corresponded with C L Bonard, the professor of mathematics at
Auxerre. Fourier was unsure if he was making the right decision in training for the priesthood. He submitted a paper on
algebra to
Montucla
in Paris and his letters to Bonard suggest that he really wanted to make a major impact in
mathematics. In one letter Fourier wrote
Yesterday was my
21
st birthday, at that age
Newton
and
Pascal
had already acquired many claims to immortality.
Fourier did not take his religious vows. Having left St Benoit in 1789, he visited Paris and read a paper on algebraic
equations at the
Académie Royale des Sciences
. In 1790 he became a teacher at the Benedictine college, École Royale
Militaire of Auxerre, where he had studied. Up until this time there had been a conflict inside Fourier about whether he
should follow a religious life or one of mathematical research. However in 1793 a third element was added to this
conflict when he became involved in politics and joined the local Revolutionary Committee. As he wrote:-
As the natural ideas of equality developed it was possible to conceive the sublime hope of establishing among us a free
relates:-
Later in 1794 Fourier was nominated to study at the École Normale in Paris. This institution had been set up for training
teachers and it was intended to serve as a model for other teacher-training schools. The school opened in January 1795
government exempt from kings and priests, and to free from this double yoke the long-usurped soil of Europe. I readily
became enamoured of this cause, in my opinion the greatest and most beautiful which any nation has ever undertaken.
Certainly Fourier was unhappy about the Terror which resulted from the French Revolution and he attempted to resign
from the committee. However this proved impossible and Fourier was now firmly entangled with the Revolution and
unable to withdraw. The revolution was a complicated affair with many factions, with broadly similar aims, violently
opposed to each other. Fourier defended members of one faction while in Orléans. A letter describing events
Citizen Fourier, a young man full of intelligence, eloquence and zeal, was sent to Loiret. ... It seems that Fourier ... got
up on certain popular platforms. He can talk very well and if he put forward the views of the Society of Auxerre he has
done nothing blameworthy...
This incident was to have serious consequences but after it Fourier returned to Auxerre and continued to work on the
revolutionary committee and continued to teach at the College. In July 1794 he was arrested, the charges relating to the
Orléans incident, and he was imprisoned. Fourier feared the he would go to the guillotine but, after Robespierre himself
went to the guillotine, political changes resulted in Fourier being freed.
and Fourier was certainly the most able of the pupils whose abilities ranged widely. He was taught by
Lagrange
, who
Fourier described as
the first among European men of science,
and also by
Laplace
, who Fourier rated less highly, and by
Monge
who Fourier described as
having a loud voice and is active, ingenious and very learned.
Fourier began teaching at the Collège de France and, having excellent relations with
Lagrange
,
Laplace
and
Monge
,
began further mathematical research. He was appointed to a position at the École Centrale des Travaux Publiques, the
school being under the direction of
Lazare Carnot
and Gaspard
Monge
, which was soon to be renamed École
Polytechnique. However, repercussions of his earlier arrest remained and he was arrested again and imprisoned. His
release has been put down to a variety of different causes, pleas by his pupils, pleas by
Lagrange
,
Laplace
or
Monge
or
three may have played a part.
ceeded
Lagrange
a change in the political climate. In fact all
By 1 September 1795 Fourier was back teaching at the École Polytechnique. In 1797 he suc
in being
r but he does not appear to
appointed to the chair of analysis and mechanics. He was renowned as an outstanding lecture
have undertaken original research during this time.
In 1798 Fourier joined Napoleon's army in its invasion of Egypt as scientific adviser.
Monge
and
Malus
were also part
of the expeditionary force. The expedition was at first a great success. Malta was occupied on 10 June 1798, Alexandria
taken by storm on 1 July, and the delta of the Nile quickly taken. However, on 1 August 1798 the French fleet was
completely destroyed by Nelson's fleet in the Battle of the Nile, so that Napoleon found himself confined to the land
that he was occupying. Fourier acted as an administrator as French type political institutions and administration was set
up. In particular he helped establish educational facilities in Egypt and carried out archaeological explorations.
While in Cairo Fourier helped found the Cairo Institute and was one of the twelve members of the mathematics
division, the others included
Monge
,
Malus
and Napoleon himself. Fourier was elected secretary to the Institute, a
position he continued to hold during the entire French occupation of Egypt. Fourier was also put in charge of collating
orking on the
Description of Egypt
which was not
f heat. His work on
the Paris Institute on 21 December 1807 and a committee consisting of
Lagrange
the scientific and literary discoveries made during the time in Egypt.
Napoleon abandoned his army and returned to Paris in 1799, he soon held absolute power in France. Fourier returned to
France in 1801 with the remains of the expeditionary force and resumed his post as Professor of Analysis at the École
Polytechnique. However Napoleon had other ideas about how Fourier might serve him and wrote:-
... the Prefect of the Department of Isère having recently died, I would like to express my confidence in citizen Fourier
by appointing him to this place.
Fourier was not happy at the prospect of leaving the academic world and Paris but could not refuse Napoleon's request.
He went to Grenoble where his duties as Prefect were many and varied. His two greatest achievements in this
administrative position were overseeing the operation to drain the swamps of Bourgoin and supervising the construction
of a new highway from Grenoble to Turin. He also spent much time w
completed until 1810 when Napoleon made changes, rewriting history in places, to it before publication. By the time a
second edition appeared every reference to Napoleon would have been removed.
It was during his time in Grenoble that Fourier did his important mathematical work on the theory o
the topic began around 1804 and by 1807 he had completed his important memoir
On the Propagation of Heat in Solid
Bodies.
The memoir was read to
,
Laplace
,
Monge
and
Lacroix
was set up to report on the work. Now this memoir is very highly regarded but at the time
it caused controversy.
There were two reasons for the committee to feel unhappy with the work. The first objection, made by
Lagrange
and
Laplace
in 1808, was to Fourier's expansions of functions as trigonometrical series, what we now call Fourier series.
Further clarification by Fourier still failed to convince them. As is pointed out in [
4
]:-
All these are written with such exemplary clarity - from a logical as opposed to calligraphic point of view - that their
inability to persuade
Laplace
and
Lagrange
... provides a good index of the originality of Fourier's views.
The second objection was made by
Biot
against Fourier's derivation of the equations of transfer of heat. Fourier had not
made reference to
Biot
's 1804 paper on this topic but
Biot
's paper is certainly incorrect.
Laplace
, and later
Poisson
, had
similar objections.
The Institute set as a prize competition subject the propagation of heat in solid bodies for the 1811 mathematics prize.
Fourier submitted his 1807 memoir together with additional work on the cooling of infinite solids and terrestrial and
radiant heat. Only one other entry was received and the committee set up to decide on the award of the prize,
Lagrange
,
Laplace
,
Malus
, Haüy and
Legendre
, awarded Fourier the prize. The report was not however completely favourable and
analysis to
integrate them still leaves something to be desired on the score of generality and even rigour.
states:-
... the manner in which the author arrives at these equations is not exempt of difficulties and that his

Pitanje 17: Periodi
č
ni signali i Fourier-ov red
Ve
ć
smo rekli da je kontinualni signal
( )
x t
periodi
č
an ukoliko zadovoljava slede
ć
u relaciju:
(
) ( )
x t T
x t
+
=
(17.1)
za neku nenultu konstantu
T
i za sve vrednosti vremenske promenljive
t
. Perioda signala je
najmanje nenulta pozitivna vrednost
T
za koju je (17.1) zadovoljeno. Osnovni primer periodi
č
nog
signala je realna sinusoida
( )
(
)
0
cos
x t
A
t
ω
φ
=
+
(17.2)
gde je
A
realna konstanta i
0
0
ω
>
, ili kompleksna sinusoida
( )
0
j t
x t
Ae
ω
=
(17.3)
gde je
A
kompleksni broj. Oba ova signala su periodi
č
na sa periodom
0
2 /
T
π ω
=
. Vrlo
č
esto se u
literaturi sre
ć
e i takozvani harmoni
č
ni signal definisan slede
ć
om relacijom:
( )
0
jk t
k
x t
e
ω
=
(17.4)
gde je
k
element skupa celih brojeva, i ovaj signal ima periodu
0
2
T
k
π
ω
=
ako je
k
razli
č
ito od nule
(u slu
č
aju
k
=0 signal
( )
k
x t
je konstantan, takozvani
DC
signal i svaka realna vrednost
T
zadovoljava relaciju (17.1)). Kako smo u prethodnom pitanju zaklju
č
ili, svi eksponencijalni signali,
realni ili kompleksni, su sopstvene funkcije LTI sistema. To zna
č
i da je i harmoni
č
ni signal (17.16)
tako
đ
e sopstvena funkcija.
Posmatrajmo sada harmoni
č
ni ili trigonometrijski red
( )
0
jk t
k
k
x t
a e
ω
∞
=−∞
=
∑
(17.5)
sa kompleksnim koeficijentima
. Komponente ovog reda koje se dobijaju za
se nazivaju
osnovnim ili fundamentalnim komponentama reda, dok se sabirci za
k
a
1
k
= ±
2
k
≥
nazivaju harmoni
č
nim
komponentama ili višim harmonicima. Pošto je perioda osnovne komponente
1
0
2
T
π
ω
=
ceo multipl
periode
k
-tog harmonika
0
2
k
T
k
π
ω
=
, zaklju
č
ujemo da je trigonometrijski red (17.6) periodi
č
an sa
periodom . Osnovna ideja od koje je krenuo Fourier je bila da se svaki periodi
č
an signal može
predstaviti harmoni
č
nim ili trigonometrijskim redom u formi koja je identi
č
na ili sli
č
na relaciji
(17.5). P.L. Dirichlet je kasnije ovu pretpostavku i dokazao za sve osim za ograni
č
en broj,
takozvanih devijantnih slu
č
ajeva. Otuda se reprezentacija periodi
č
nog signala kakva je data
relacijom (17.17) naziva
Fourier-ovim redom
, a uslovi pod kojima jednakost u ovoj relaciji važi se
nazivaju
Dirichlet-ovim
uslovima.
1
T
Primer 17.1:
Po
đ
imo od vrlo jednostavne realne sinusoide
( )
( )
0
cos
x t
t
ω
=
(17.6)
Imaju
ć
i u vidu Euler-ovu predstavu kompleksnih brojeva, ova realna sinusoida se može napisati
preko kompleksnih sinusoida u formi
( )
(
0
1
2
j t
j t
x t
e
e
ω
ω
−
=
+
)
0
(17.7)
O
č
igledno je forma (17.7) zapravo Fourier-ov red pri
č
emu je
1
1
1
2
0
1
k
a
a
a
za k
−
=
=
=
≠ ±
(17.8)
Sli
č
no tome, ukoliko posmatramo realni sinusni signal
( )
( )
0
sin
x t
t
ω
=
(17.9)
opet možemo do
ć
i do Fourier-ovog reda na slede
ć
i na
č
in:
( )
(
)
0
0
1
2
j t
j t
jk t
k
k
x t
e
e
a e
j
0
ω
ω
∞
−
=−∞
=
−
=
∑
ω
(17.10)
gde je
1
1
1
2
0
1
k
a
a
j
a
za k
−
= −
=
=
≠ ±
(17.11)
Ukoliko posmatramo nešto složeniji signal kao što je
( )
( )
( )
2
0
cos
sin
0
x t
t
t
ω
ω
=
+
(17.12)
u želji da ga predstavimo Fourier-ovim redom, treba da se poslužimo trigonometrijskim
identitetom:
( )
( )
(
2
1
sin
1 cos 2
2
)
x
x
=
−
(17.13)
pa onda dobijamo jednakost:
( )
(
)
(
)
0
0
0
0
0
0
0
2
2
2
2
1
1 1 1
2
2 2 2
1
1
1 1
1
4
2
2 2
4
j t
j t
j t
j t
j t
j t
j t
j t
x t
e
e
e
e
e
e
e
e
ω
ω
ω
ω
0
ω
ω
ω
−
−
−
−
−
=
+
+ −
+
= −
+
+ +
−
ω
(17.14)
odnosno
( )
0
jk t
k
k
x t
a e
ω
∞
=−∞
=
∑
(17.15)
gde je
2
1
0
1
2
1
1
1
1
,
,
,
,
4
2
2
2
0
3
k
a
a
a
a
a
a
za k
−
−
= −
=
=
=
= −
=
≥
1
4 (17.16)
Na ovim jednostavnim primerima smo ilustrovali traženje sopstvenih funkcija i sopstvenih
vrednosti nekih jednostavnijih periodi
č
nih signala. Tako
đ
e, podsetimo se da ako je
( )
x t
periodi
č
an
signal koji je doveden na ulaz nekog LTI sistema, tada se odziv tog sistema
može dobiti
konvolucijom impulsnog odziva i pobude:
( )
y t
( ) ( ) ( )
*
y t
x t
h t
=
. Kako smo pretpostavili da je pobuda

( )
0
*
*
jk t
k
k
x t
a e
ω
∞
−
=−∞
=
∑
(17.26)
Ukoliko u poslednjoj sumi izvršimo smenu
k
sa –
k
i uzimaju
ć
i u obzir da je
( )
( )
*
x t
x t
=
za realne
signale, dobija se
( )
0
*
jk t
k
k
x t
a e
ω
∞
−
=−∞
=
∑
(17.27)
Upore
đ
uju
ć
i poslednji izraz sa izrazom (17.15), zaklju
č
uje se da je relacija (17.25) valjana za svaki
realan signal
( )
x t
. Shodno tome Fourier-ov red realnih signala se može napisati u slede
ć
oj formi:
(17.28)
( )
(
0
0
1
jk t
jk t
k
k
k
x t
a
a e
a e
ω
∞
−
−
=
=
+
+
∑
)
0
ω
)
0
ω
ili ekvivalentno tome
(17.29)
( )
(
0
*
0
1
jk t
jk t
k
k
k
x t
a
a e
a e
ω
∞
−
=
=
+
+
∑
Ukoliko koeficijent
napišemo u Euler-ovoj formi
k
a
k
j
k
k
a
A e
Θ
=
(17.30)
relacija (17.29) postaje
(17.31)
( )
(
)
(
(
0
0
0
1
k
j k t
j k t
k
k
x t
a
A e
e
ω
ω
∞
+Θ
−
+Θ
=
=
+
+
∑
)
)
k
0
k
odnosno
(17.32)
( )
(
)
0
1
2
cos
k
k
x t
a
A
k t
ω
∞
=
=
+
+ Θ
∑
Time je signal
( )
x t
napisan u formi zbira realnih sinusoida u
č
estanosti
0
k
ω
, sa po
č
etnim fazama
i amplitudama
. Ovo je jedan od naj
č
eš
ć
ih na
č
ina reprezentacije Fourier-ovog reda za realne
signale.
k
Θ
k
A
Druga algernativna forma reprezentacije Fourier-ovog reda jeste takozvana pravougaona
forma, u kojoj se koeficijent
predstavi preko svog realnog i imaginarnog dela:
k
a
k
k
a
B
jC
k
=
+
(17.33)
Tada relacija (17.29) postaje
( )
(
)
(
)
(
0
0
1
2
cos
sin
k
k
k
)
0
x t
a
B
k t
C
k t
ω
∞
=
=
+
−
∑
ω
(17.34)
gde u poslednjoj relaciji ne figuriše faza sinusoida
k
Θ
ali se zato pojavljuju i sinusna i kosinusna
komponenta. U svom originalnom radu, Fourier je predstavio red baš u formi kakva je relacija
(17.34).
Odre
đ
ivanje koeficijenata Fourier-ovog reda
U primerima 17.1 i 17.2. mi smo odredili koeficijente Fourier-ovog reda na osnovu Euler-
ove formule i nekih trigonometrijskih identiteta. Me
đ
utim, u opštem slu
č
aju, kada su signali koje
analiziramo složenije prirode, primena ovakvog postupka je prili
č
no ograni
č
ena. Potrebno nam je
da razvijemo opšti postupak za nalaženje koeficijenta Fourier-ovog reda za bilo koji periodi
č
an
signal
( )
x t
, naravno pod pretpostavkom da Fourier-ov red konvergira (setimo se Dirichlet-ovih
uslova). U ovom odeljku
ć
emo razviti takav metod.
Po
đ
imo opet od po
č
etne pretpostavke da se periodi
č
ni signal
( )
x t
može predstaviti u formi
Fourier-ovog reda:
( )
0
jk t
k
k
x t
a e
ω
∞
=−∞
=
∑
(17.35)
i pomnožimo levu i desnu stranu ove relacije sa
0
jn t
e
ω
−
:
( )
(
)
0
0
j k n
t
jn t
k
k
x t e
a e
ω
ω
∞
−
−
=−∞
=
∑
(17.36)
Integrale
ć
i obe strane poslednje jedna
č
ine u vremenu dužine koja je jednaka periodi
T
signala
( )
x t
,
dobija se
( )
(
)
0
0
j k n
t
jn t
k
T
T
k
x t e
dt
a e
dt
ω
ω
∞
−
−
=−∞
=
∑
∫
∫
(17.37)
gde oznaka
ozna
č
ava integral po proizvoljnom intervalu
T
∫
(
)
0
0
,
t t
T
+
dužine
T
. Ukoliko
izvršimo zamenu redosleda operacije integraljenja i sumiranja, poslednja relacija postaje:
( )
(
)
0
0
j k n
t
jn t
k
T
T
k
x t e
dt
a
e
dt
ω
ω
∞
−
−
=−∞
=
∑
∫
∫
(17.38)
Ukoliko želimo da izra
č
unamo integral na desnoj strani jednakosti, primenim Euler-ovu formulu:
(17.39)
(
)
(
)
(
)
(
)
(
0
0
cos
sin
j k n
t
T
T
T
e
dt
k n
t dt
j
k n
t d
ω
ω
−
=
−
+
−
∫
∫
∫
)
0
t
ω
Za
,
k n
≠
(
)
(
)
0
cos
k n
t
ω
−
i
(
)
(
0
sin
k n
t
)
ω
−
su realne sinusoide u
č
estanosti
(
)
0
k n
ω
−
i periode
/
T k n
−
. Otuda, integrale
ć
i ove sinusoide po intervalu dužine
T
, mi jedan isti oblik integralimo
k n
−
puta jer toliko se perioda sadrži u intervalu vremena
T
, pa se za svaki od ovih integrala kao
rezultat dobija nula. Sa druge strane, kada je
k n
=
podintegralna funkcija na levoj strani postaje
, pa je vrednost integrala jednaka
T
. Kombinuju
ć
i ova dva rezultata dobijamo:
0
1
j
e
=
(
)
0
,
0,
j k n
t
T
T k n
e
dt
k n
ω
−
=
⎧
= ⎨
≠
⎩
∫
(17.40)
Ako ovaj rezultat uvrstimo u desnu stranu relacije (17.38), dobijamo
( )
0
jn t
n
T
x t e
dt a T
ω
−
=
∫
(17.41)
što nas dovodi do željenog rezultata. Slede
ć
e dve relacije su vrlo važne i definišu takozvani
Fourier-ov par
:

( )
0
2
jk t
k
neparno k
x t
e
jk
ω
π
∞
=−∞
=
∑
(17.47)
Sre
đ
ivanjem poslednje sume i uzimaju
ć
i u obzir posebno pozitivne a posebno negativne indekse
k
,
možemo signal
x
napisati u slede
ć
oj formi:
( )
(
)
(
0
0
0
1
1
2
sin
jk t
jk t
k
k
neparno k
neparno k
)
4
x t
e
e
jk
k
ω
ω
k t
ω
π
π
∞
∞
−
=
=
=
−
=
∑
∑
(17.48)
što predstavlja formu Fourier-ovog reda kakva je data u relaciji (17.32) s tim što su koeficijenti
2 /
k
C
k
π
= −
.
Primer 17.4:
Posmatrajmo povorku pravougaonih
č
etvrtki
( )
x t
kakva je prikazana na slici 17.2.
( )
x t
t
T
T
−
1
P
T
Slika 17.2: Pravougaona povorka
č
etvrtki
Sli
č
no malopre
đ
ašnjem postupku, ako želimo da odredimo Fourier-ov red za prikazani signal, treba
sra
č
unati slede
ć
i integral:
( )
(
)
(
)
0
0
0
0
/ 2
/ 2
/ 2
/ 2
/ 2
/ 2
0
0
/ 2
/ 2
1
1
1
sin
/ 2
1
2
p
p
p
p
p
p
T
T
T
jk t
jk t
jk t
k
T
T
T
p
jk T
jk T
a
x t e
e
dt
e
T
T
jk T
k T
e
e
jk
k
ω
ω
ω
ω
ω
ω
π
π
−
−
−
−
−
−
−
=
=
=
−
= −
−
=
∫
∫
0
ω
(17.49)
Jasno je da za
k
=0, poslednji izraz dobija formu 0:0, pa je potrebno primeniti L'Hopital-ovo pravilo
na osnovu koga se dobija da je
0
0
2
p
T
T
a
T
p
ω
π
=
=
(17.50)
što o
č
igledno predstavlja srednju vrednost signala na intevalu dužine
T
. Na slici 17.3. su prikazani
koeficijenti
pod pretpostavkom da je
k
a
p
T
T
<<
. Ovakva reprezentacija Fourier-ovih koeficijenata
se naziva
spektrumom signala
.
k
a
k
0
/
p
T T
Slika 17.3: Fourier-ovi koeficijenti povorke
č
etvrtki
Primetimo da se prvi koeficijent koji je jednak nuli dešava kada je
0
/ 2
p
k T
ω
π
=
, odnosno za
. Primetimo još da u specijalnom slu
č
aju kada je
/
p
k T T
=
/ 2
p
T
T
=
, signal
( )
x t
po
č
inje da li
č
i na
signal iz prethodnog primera, s tim što je transliran naviše, pa ima srednju vrednost
0
1/ 2
a
=
a
ostali Fourier-ovi koeficijenti dobijaju formu
( )
(
)
1 / 2
1
,
0,
0
k
k
za neparno k
a
k
za parno k
π
−
⎧ −
⎪
= ⎨
⎪
≠
⎩
(17.51)
Konvergencija Fourier-ovih redova
U prethodnom izlaganju je pokazano kako se izra
č
unavaju koeficijenti Fourier-ovog reda za
zadati periodi
č
ni signal, ali ni jednog momenta se nismo pitali da li uopšte dobijeni red konvergira,
a to jeste vrlo važno pitanje. Pitanje konvergencije možemo formulisati na slede
ć
i na
č
in: znamo da
Fourier-ov red podrazumeva da se periodi
č
an signal
( )
x t
može predstaviti na slede
ć
i na
č
in:
( )
0
jk t
k
k
x t
a e
ω
∞
=−∞
=
∑
(17.52)
Ako umesto ovog beskona
č
nog reda formiramo njegovu aproksimaciju kao red sa kona
č
nim brojem
sabiraka:
( )
0
K
jk t
K
k
k
K
x t
a e
ω
=−
=
∑
(17.53)
pitanje konvergencije postaje pitanje da li sa pove
ć
avanjem broja sabiraka, odnosno kada
,
signal
K
→ ∞
( )
K
x t
postaje sve bliži signalu
( )
x t
. U poslednjoj re
č
enici je upotrebljen pridev 'bliži'
me
đ
utim, matemati
č
ki govore
ć
i neophodno je definisati kriterijum po kome možemo ceniti koliko
su dva signala bliska. U tom smislu, definišimo signal greške ili rezlike izme
đ
u ova dva signala na
slede
ć
i na
č
in:
( ) ( )
( )
K
e t
x t
x t
=
−
K
(17.54)

diskontinuiteta. U ta
č
kama diskontinuiteta Fourier-ov red konvergira ka srednjoj vrednosti
grani
č
nih vrednosti sa leve i desne strane diskontinuiteta.
( )
x t
t
T
T
−
( )
x t
t
T
T
−
( )
x t
t
T
T
−
Slika 17.4: Primer tri periodi
č
na signala (trougaoni, testerasti i periodi
č
na povorka impulsa)
Primer 17.6:
Pogledajmo signal
( )
x t
koji je prikazan na slici 17.5.
( )
x t
t
/ 2
T
/ 2
T
−
1
Slika 17.5: Primer periodi
č
nog signala
Ako poželimo da odredimo Fourier-ov red koji odgovara ovom signalu treba da ponovimo postupak
iz primera 17.3, gde je dobijena slede
ć
a relacija:
( )
(
)
(
0
0
0
1
1
2
sin
jk t
jk t
k
k
neparno k
neparno k
)
4
x t
e
e
jk
k
ω
ω
k t
ω
π
π
∞
∞
−
=
=
=
−
=
∑
∑
(17.58)
Na slici 17.6. su prikazani signali
( )
(
0
1
4
sin
K
K
k
neparno k
)
x t
k
k t
ω
π
=
=
∑
za razli
č
ite vrednosti
K
kako bi
ilustrovali proces konvergencije reda.
( )
K
x t
3
K
=
( )
K
x t
7
K
=
( )
K
x t
11
K
=
1.18
( )
K
x t
19
K
=
1.18
Slika 17.6: Ilustracija konvergencije Fourier-ovog reda
Primetimo da sa pove
ć
anjem parametra
K
, talasanja u signalu
( )
K
x t
(takozvani
rippling
u
engleskoj literaturi) postaje sve uže i uže, ali preskoci se ne smanjuju. I za
K
=11 i za
K
=19, preskok
iznosi oko 18%. Ova se pojava naziva
Gibbs
-ovim efektom i uvek se javlja kada Fourier-ovim
redom aproksimiramo signal koji sadrži diskontinuitete. Možda deluje zbunjuju
ć
e da
( )
0
K
e t
→
kada
a da se pri tome ovaj prekok ne smanjuje. Me
đ
utim, objašnjenje leži u
č
injenici da se
širina ovog preskoka sa pove
ć
anjem
K
smanjuje, i da se za svaku vrednost vremenske promenljive
t
može na
ć
i dovoljno veliko
K
tako da je
K
→ ∞
( )
K
e t
proizvoljno malo.

Shodno tome, definišemo novu skalu spektra
( )
X j
ω
uvode
ć
i relaciju
(
)
0
k
X jk
Ta
ω
=
(18.1)
dozvoljavaju
ć
i bilo koje vrednosti za
k
i
0
ω
. Ako sa
( )
T
x t
ozna
č
imo periodi
č
nu povorku
č
etvrtki
sa slike 18.2, onda se ovaj signal može predstaviti Fourier-ovim redom na slede
ć
i na
č
in:
( )
(
)
0
0
1
jk t
T
k
x t
X jk
e
T
ω
ω
∞
=−∞
=
∑
(18.2)
ili, pošto je
0
2 /
T
π ω
=
( )
(
)
0
0
1
2
jk t
T
k
x t
X jk
e
ω
0
ω
ω
π
∞
=−∞
=
∑
(18.3)
Kako perioda
T
teži beskona
č
nosti signal
( )
T
x t
sa slike 18.2 teži signalu
( )
x t
sa slike 18.1, a
Fourier-ov red na desnoj strani jednakosti (18.3) umesto sume postaje integral, pri
č
emu
0
k
ω
postaje kontinualna u
č
estanost
ω
, dok
č
lan
0
ω
postaje priraštaj u
č
estanosti
d
ω
. Na taj na
č
in
dobijamo dve izuzetno važne relacije koje definišu takozvanu
Fourier-
ovu transformaciju:
( )
( )
1
2
j t
x t
X j
e
ω
d
ω
ω
π
∞
−∞
=
∫
(18.4)
i
( )
( )
j t
X j
x t e
ω
ω
∞
−
−∞
=
∫
dt
(18.5)
Signal
( )
x t
i funkcija
( )
X j
ω
se nazivaju Fourier-ov transformacioni par, pri
č
emu se relacija
(18.4) naziva sinteti
č
kom jedna
č
inom Fourier-ove transformacije a relacija (18.5) analiti
č
kom
jedna
č
inom. Ove dve relacije su analogne relacijama (6.54) i (6.55) koje su definisale
transformacioni par za Fourier-ov red u slu
č
aju periodi
č
nih signala.
Primer 18.1:
Ako potražimo Fourier-ov transformacioni par za signal
( )
x t
prikazan na slici 18.1,
potrebno je da sra
č
unamo integral definisan relacijom (18.5):
( )
( )
(
)
/ 2
/ 2
/ 2
/ 2
/ 2
/ 2
2sin
/ 2
p
p
p
p
p
p
T
j t
T
j t
j t
T
T
j T
j T
p
e
X j
x t e
dt
e
dt
j
T
e
e
j
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
−
∞
−
−
−∞
−
−
−
=
=
=
−
−
=
=
∫
∫
(18.6)
Prikaz funkcije
( )
X j
ω
se uobi
č
ajeno naziva spektrom signala
( )
x t
i on je dat na slici 18.4.
( )
X j
ω
ω
p
T
2 /
p
T
π
Slika 18.4: Spektar signala sa slike 18.1
Uobi
č
ajena oznaka za funkciju oblika
( )
( )
sin
/
sinc z
z z
=
pa se
č
esto spektar iz jedna
č
ine (18.6)
predstavlja u obliku
( )
sinc
2
p
p
T
X j
T
ω
ω
⎛
⎞
=
⎜
⎝
⎠
⎟
(18.7)
Primetimo još da se prvi presek spektruma
( )
X j
ω
sa
ω
osom dešava na u
č
estanosti
2 /
p
T
ω
π
=
.
Ovaj rezultat demonstrira poznati princip neodre
đ
enosti (
Heisenberg
-ov princip neodre
đ
enosti) po
kome se vidi da su dužina trajanja signala i njegov propusni opseg (širina spektra) obrnuto
proporcionalni.
Konvergencija Fourier-ove transformacije
S obzirom da smo Fourier-ovu transformaciju izveli iz Fourier-ovih redova, logi
č
no bi bilo
o
č
ekivati da su uslovi konvergencije i jedne i druge transformacije vrlo sli
č
ni, što i jeste slu
č
aj.
Pretpostavimo da smo krenuli od signala
( )
x t
i da smo na osnovu relacije (18.5) sra
č
unali njegov
transformacioni par
( )
X j
ω
a da smo onda primenom relacije (18.4) sra
č
unali signal
( )
ˆ
x t
koji,
generalno govore
ć
i, nije identi
č
an po
č
etnom signalu
( )
x t
i da izme
đ
u njih postoji razlika ili greška
definisana na slede
ć
i na
č
in:
( )
( ) ( )
ˆ
e t
x t
x t
=
−
(18.8)
Opet u želji da meru sli
č
nosti ova dva signala izrazimo kroz jedan kvantitativni pokazatelj, uvedimo
takozvanu totalnu energiju signala
e
na slede
ć
i na
č
in:
( )
2
E
e t
dt
∞
−∞
=
∫
(18.9)
Re
ć
i
ć
emo da Fourier-ova transformacija konvergira ako je
E
=0. Opet, to ne zna
č
i da je
( )
( )
ˆ
x t
x t
=
za svako
t
, ve
ć
da je energija signala razlike izme
đ
u signala
( )
x t
i
( )
ˆ
x t
jednaka nuli. Postoje dva
dovoljna uslova i ako signal
( )
x t
zadovolji bar jedan od njih, tada je uslov konvergencije
zadovoljen.
1. uslov:
Ako je kvadrat signala
( )
x t
integrabilan, odnosno ako je
( )
2
x t
dt
∞
−∞
< ∞
∫
(18.10)
tada Fourier-ova transformacija konvergira. Ovaj uslov je ekvivalentan zahtevu da signal ima
kona
č
nu energiju.
2. uslov:
Ovo je takozvani
Dirichlet-
ov uslov i on zahteva da signal bude absolutno integrabilan,
odnosno da bude zadovoljena relacija
( )
x t dt
∞
−∞
< ∞
∫
(18.11)
tada je, osim u nekoliko devijantnih slu
č
ajeva, tako
đ
e obezbe
đ
ena konvergencija Fourier-ove
transformacije. Ovi specijalni, ili
č
esto nazivani patološki slu
č
ajevi se jednostavno eliminišu sa dva
dodatna zahteva koje signal mora da ispuni. Prvi od njih je da signal
( )
x t
ima kona
č
an broj
minimuma i maksimuma u bilo kom kona
č
nom intervalu, a drugi je da u bilo kom kona
č
nom
intervalu vremena postoji kona
č
an broj broj prekida sa kona
č
nim grani
č
nim vrednostima sa obe

Uobi
č
ajeno je da se za propusni opseg signala uzima ona u
č
estanost na kojoj je amplituda 2 puta
manja od maksimalne amplitude. U našem slu
č
aju je to u
č
estanost
a
ω
=
i pri tome je vremenska
konstanta signala
( )
x t
jednaka 1/
a
, što zna
č
i da je opet zadovoljen Heisenberg-ov princip
neodre
đ
enosti.
Primer 18.4:
Posmatrajmo signal
č
ija je Fourier-ova transformacija data u formi:
( )
1 ,
0 ,
b
b
X j
ω ω
ω
ω ω
⎧
<
⎪
= ⎨
>
⎪⎩
(18.17)
što predstavlja pravougaonu
č
etvrtku, ali u frekvencijskom domenu. Primenjuju
ć
i sinteti
č
ku
jedna
č
inu, možemo videti kakvom signalu u vremenskom domenu odgovara ovaj transformacioni
par:
( )
( )
( )
0
0
sin
1
1
2
2
2
b
b
b
b
j t
j t
j t
b
j t
t
e
e
e
x t
e d
jt
jt
ω
ω
ω
ω
ω
ω
ω
ω
t
ω
ω
π
π
π
−
−
−
−
=
=
=
=
∫
π
(18.18)
Poslednji rezultat možemo izraziti pomo
ć
u ve
ć
definisane sinc funkcije:
( )
(
sinc
b
b
)
x t
t
ω
ω
π
=
(18.19)
Ovaj primer je vrlo zanimljiv jer ukazuje na takozvani princip
dualnosti
koji postoji izme
đ
u signala
u vremenskom i frekvencijskom domenu. Na po
č
etku ovog predavanja smo posmatrali signal koji je
definisan kao pravougaona
č
etvrtka u vremenskom domenu i došli smo do zaklju
č
ka da je njegov
Fourier-ov transformacioni par u obliku sinc funkcije. Sada smo posmatrali signal
č
iji je
transformacioni par u frekvencijskom domenu dat u obliku pravougaone
č
etvrtke i ispostavilo se da
je takav signal u vremenskom domenu u obliku sinc funkcije. Ovakav zaklju
č
ak i nije iznena
đ
uju
ć
i,
s obzirom na to da su sinteti
č
ka i analiti
č
ka jedna
č
ine i Fourier-ovog reda i Fourier-ove
transformacije gotovo identi
č
ne, jedine razlike se pojavljuju u multiplikativnim konstantama i u
znaku u eksponenta
j t
e
ω
odnosno
j t
e
ω
−
podintegralne funkcije.
Fourier-ova transformacija periodi
č
nih signala
Do sada smo prošli kroz dve razli
č
ite Fourier-ove reprezentacije kontinualnih signala. Videli
smo da se Fourier-ov red može primeniti na signale koji su period
č
ni, dok je Fourier-ova
transformacija primerena aperiodi
č
nim signalima. Bez obzira što su obe od ovih transformacija
jednako važne i primenjive, uobi
č
ajeno je da se me
đ
u njima ne pravi razlika, pogotovo ne u smislu
razdvajanja u primeni. Recimo, ako imamo signal koji se može napisati kao zbir jedne periodi
č
ne i
jedne aperiodi
č
ne komponente, besmisleno je posebno primenjivati Fourier-ov red na periodi
č
nu a
Fourier-ovu transformaciju na aperiodi
č
nu komponentu, i onda dobijene rezultate analizirati
odvojeno. Na svu sre
ć
u, lako se pokazuje da se Fourer-ova transformacija može primeniti i na
periodi
č
ne signale. Striktno govore
ć
i, ovakva generalizacija ili proširenje Fourier-ove
transformacije na periodi
č
ne signale zahteva jednu dodatku rigoroznu matemati
č
ku analizu, jer
periodi
č
ni signali uglavnom ne zadovoljavaju uslove navedene za konvergenciju Fourer-ove
transformacije, me
đ
utim, ovde
ć
emo tu vrstu diskusije presko
č
iti jer nije od prevelikog zna
č
aja u
primeni.
Pretpostavimo da nam je dat transformacioni par nekog signala u formi
( )
(
)
0
2
X j
ω
πδ ω ω
=
−
(18.20)
Ako želimo da vidimo kom signalu
( )
x t
odgovara ovakav transformacioni par, primenimo
sinteti
č
ku jedna
č
inu:
( )
( )
(
)
0
0
1
1
2
2
2
j t
j t
j t
x t
X j
e dt
e dt e
ω
ω
ω
πδ ω ω
π
π
∞
∞
−∞
−∞
=
=
−
∫
∫
ω
=
(18.21)
što je o
č
igledno periodi
č
an signal (kompleksna sinusoida u
č
estanosti
0
ω
). Ako idemo dalje, pa
pretpostavimo da je transformacioni par predstavljen beskona
č
nim zbirom Dirakovih impulsa u
frekvencijskom domenu, na slede
ć
i na
č
in:
( )
(
0
2
k
k
X j
a
k
)
ω
π δ ω
ω
∞
=−∞
=
∑
−
(18.22)
dobi
ć
emo da takav par odgovara slede
ć
em signalu u vremenskom domenu:
( )
0
jk t
k
k
x t
a e
ω
∞
=−∞
=
∑
(18.23)
što predstavlja Fourier-ov red proizvoljnog periodi
č
nog signala sa periodom
0
2 /
T
π ω
=
. Shodno
tome možemo zaklju
č
iti da se Fourier-ova transformacija može primeniti i na periodi
č
ne signala i
da
ć
e u tom slu
č
aju odgovaraju
ć
a frekvencijska funkcija uvek imati formu povorke Dirakovih
impulsa na u
č
estanostima
0
,
0, 1, 2,...
k
k
ω
= ± ±
i sa intenzitetima
koji bi se dobili iz Fourier-
ovog reda.
k
a
Pitanje 19: Osobine i primena Fourier-ove transformacije
Fourier-ova
transformacija
ima
č
itav niz osobina, koja omogu
ć
ava da se brzo, bez nekog
preteranog ra
č
una skiciraju spektri velikog broja
č
esto sretanih signala. Istovremeno, zna
č
ajna
primena Fourier-ove transformacije se ogleda u jednostavnom razumevanju i projektovanju sistema
za
modulaciju, odabiranje i filtraciju signala
.
Uobi
č
ajena oznaka koja se koristi da se naglasi da vremenski signal
( )
x t
i frekvencijska
funkcija
( )
X j
ω
jesu transformacioni par, jeste slede
ć
a:
( )
( )
x t
X j
ω
↔
(19.1)
pri
č
emu je
( )
( )
1
2
j t
x t
X j
e
ω
d
ω
ω
π
∞
−∞
=
∫
(19.2)
i
( )
( )
j t
X j
x t e
ω
ω
∞
−
−∞
=
∫
dt
(19.3)
Tako na osnovu prethodnih primera možemo pisati:
( )
1
at
e u t
a j
ω
−
↔
+
(19.4)
za
a
ve
ć
e od nule, ili
( )
(
)
(
0
0
sin
t
j
)
0
π
ω
δ ω ω
δ ω
↔
−
−
+
ω
⎡
⎤
⎣
⎦
(19.5)

Primer 19.5:
Jedan od
č
esto koriš
ć
enih metoda modulacije u telekomunikacijama je amplitudska
modulacija. Zamislimo da smo od nekog korisnog signala
( )
x t
dobili modulisani signal
( )
y t
na
slede
ć
i na
č
in:
( )
( )
(
)
cos
c
y t
x t
B
t
ω
φ
=
+
⎡
⎤
⎣
⎦
+
)
(19.13)
Parametar
B
se obi
č
no ozna
č
ava kao bajes ili pomeraj, signal modulacije
(
cos
c
t
ω
φ
+
se naziva
nose
ć
i signal (
carrier signal
) a u
č
estanost
c
ω
nose
ć
a u
č
estanost (
carrier frequency
). Ako
modulisani signal
napišemo na slede
ć
i na
č
in:
( )
y t
( )
( )
( )
( )
1
2
1
1
1
1
2
2
2
2
c
c
c
c
c
j t
j t
j t
j t
j t
j t
y t
x t
B e
e
x t e
x t e
Be
Be
ω
ω
c
ω
ω
ω
−
−
−
⎡
⎤
=
+
+
⎡
⎤
⎣
⎦ ⎣
⎦
=
+
+
+
ω
(19.14)
znaju
ć
i spektar originalnog signala, lako se dolazi do oblika spektra modulisanog signala, jer je na
osnovu (19.14)
( )
(
)
(
)
(
)
(
)
(
)
(
1
1
2
2
c
c
c
Y j
X j
X j
B
B
)
c
ω
ω ω
ω ω
π δ ω ω
π δ ω ω
=
−
+
+
+
−
+
+
(19.15)
Primer ovih spektara dat je na slici 19.1.
( )
X j
ω
b
ω
−
b
ω
ω
A
( )
Y j
ω
c
ω
ω
/ 2
A
c
ω
−
B
π
B
π
c
b
ω ω
−
c
b
ω ω
+
Slika 19.1: Spektri osnovnog i modulisanog signala
U cilju rekonstrukcije osnovnog signala na osnovu modulisanog, vrši se postupak demodulacije,
me
đ
utim, analiza ovog postupka izlazi iz okvira ovog kursa.
Skaliranje po vremenu i u
č
estanosti
Posmtrajmo sada vremenski kontinualan signal koji je skaliran u vremenu
gde je
a
realan parametar.Tada je odgovaraju
ć
i Fourier-ov transformacioni par
( )
at
x
( )
{
}
( )
j t
x at
x at e
dt
ω
∞
−
−∞
=
∫
F
(19.16)
Nakon uvo
đ
enja smene promenljive
τ
=
at
, dobija se
( )
{
}
( )
/
1
1
j
a
j
x at
x
e
d
X
a
a
ωτ
a
ω
τ
τ
∞
−
−∞
⎛
=
=
⎜
⎝
⎠
∫
F
⎞
⎟
(19.17)
ako je
a
pozitivno, i
( )
{
}
( )
/
1
j
a
j
x at
x
e
d
X
a
a
ωτ
1
a
ω
τ
τ
−∞
−
∞
⎛
=
= −
⎜
⎝
⎠
∫
F
⎞
⎟
(19.18)
ako je
a
negativno. Kombinuju
ć
i poslednja dva izraza, definitivno možemo napisati
( )
⎟
⎠
⎞
⎜
⎝
⎛
↔
a
j
X
a
at
x
ω
1
(19.19)
odakle zaklju
č
ujemo da se skala faktor
a
u vremenskom domenu ima za posledicu skala faktor 1/
a
u
frekvencijskom domenu pri
č
emu se ceo transformacioni par deli koeficijentom
a
. Primetimo da je
ovaj rezultat potpuno u saglasnosti sa Heisenberg-ovim principom neodre
đ
enosti: širenje signala u
vremenu dovodi do sužavanja spektra po frekvenciji i obrnuto. Kao posledicu navedene osobine,
zanimljiv je specijalan slu
č
aj
a
=-1:
( )
(
)
ω
j
X
t
x
−
↔
−
(19.20)
Diferenciranje i integraljenje signala
Ukoliko krenemo od sinteti
č
ke jedna
č
ine i izvršimo diferenciranje njene leve i desne strane,
dobija se slede
ć
a jednakost:
( )
( )
( )
∫
∫
∞
∞
−
∞
∞
−
=
=
ω
ω
ω
π
ω
ω
π
ω
ω
d
e
j
X
j
d
dt
e
d
j
X
dt
t
dx
t
j
t
j
2
1
2
1
(19.21)
i shodno tome zaklju
č
ujemo da su signali
( )
dt
t
dx
/
i
( )
ω
ω
j
X
j
transformacioni par:
( )
(
ω
ω
j
X
j
dt
t
dx
↔
)
(19.22)
Drugim re
č
ima, diferenciranje u vremenskom domenu za posledicu u frekvencijskom domenu ima
množenje sa
ω
j
. Ovo je važan rezultat koji
ć
e se kasnije
č
esto koristiti. Kako je integracija obrnuti
proces od integraljenja, logi
č
no je o
č
ekivati da integracija u vremenskom domenu za posledicu ima
deljenje
č
lanom
ω
j
u frekvencijskom domenu. To je bezmalo ta
č
no, naime postoji još jedan
dodatni
č
lan o kome treba voditi ra
č
una. Po
đ
emo li opet od sinteti
č
ke jedna
č
ine i integralimo obe
strane, dobi
ć
emo slede
ć
u relaciju:
( )
( )
( ) (
ω
δ
π
ω
ω
τ
τ
0
1
X
j
X
j
d
x
t
+
↔
∫
∞
−
)
(19.23)
Možda se drugi sabirak u poslednjoj jedna
č
ini na desnoj strani
č
ini nelogi
č
nim, ali nije tako. Od
kada smo definisali Fourier-ov red a zatim i transformaciju, uglavnom smo operisali sa

( )
( )
(
)
( )
(
)
j
t
j
Y j
x
h t
e
dt e
d
ω
τ
ωτ
ω
τ
τ
∞
∞
−
−
−
−∞
−∞
=
−
∫
∫
τ
(19.29)
Kona
č
no, ako u unutrašnjem integralu izvršimo smenu promenljivih
λ
τ
=
−
t
, dobijamo kona
č
an
rezultat
( )
( )
( )
(
)
( ) ( )
( ) (
j
j
j
Y j
x
h
e
d
e
d
x
H j
e
d
H j
X j
ωλ
ωτ
ωτ
)
ω
τ
λ
λ
τ
τ
ω
τ
ω
∞
∞
∞
−
−
−
−∞
−∞
−∞
=
=
∫
∫
∫
ω
=
(19.30)
što drugim re
č
ima zna
č
i da ako dva signala ulaze u konvoluciju, tada se njihove Fourier-ove
transformacije množe:
( ) ( )
( ) ( )
ω
ω
j
H
j
X
t
h
t
x
↔
*
(19.31)
Množenje signala u vremenskom domenu
Ako smo videli da konvolucija signala u vremenskom domenu proizvodi množenje njihovih
transformacionih parova u frekvencijskom domenu, za o
č
ekivati je da množenje signala u
vremenskom domenu rezultuje konvolucijom u frekvencijskom domenu, i to je ta
č
no. Naime, lako
se dokazuje slede
ć
a relacija:
( ) ( )
( ) ( )
( )
(
)
(
)
1
1
*
2
2
x t p t
X j
P j
X j
P j
d
ω
ω
λ
ω
π
π
∞
−∞
↔
=
∫
λ
λ
−
(19.32)
Simetri
č
nost signala
Posmatrajmo
slu
č
aj kada želimo da izra
č
unamo Fourier-ov transformacioni par signala
( )
t
x
*
koji je konjugovano kompleksan u odnosu na signal
( )
t
x
. Tada možemo pisati:
( )
{
}
( )
( )
(
)
*
*
*
*
j t
j t
x t
x t e
dt
x t e dt
X
j
ω
ω
ω
∞
∞
−
−∞
−∞
⎡
⎤
=
=
=
⎢
⎥
⎣
⎦
∫
∫
F
−
(19.33)
što zna
č
i da se konjugovano kompleksnost u vremenskom domenu prenosi kao konjugovano
kompleksnost u frekvencijskom domenu s tim što se menja znak kompleksne varijable, odnosno
( )
(
)
ω
j
X
t
x
−
↔
*
*
(19.34)
Ako je pak signal
realan, tada je
( )
t
x
( )
( )
t
x
t
x
*
=
pa se dolazi do jednakosti
( )
(
)
ω
ω
j
X
j
X
−
=
*
(19.35)
Poslednja relacija zna
č
i da je Fourier-ova transformacija realnih signala
konjugovano-simetri
č
na
funkcija u
č
estanosti
ω
. Primetimo da smo sli
č
an rezultat dobili kod Fourier-ovog reda za slu
č
aj
realnih signala:
.
*
k
k
a
a
−
=
Ako sada Fourier-ovu transformaciju napišemo u formi zbira realnog i imaginarnog dela:
( )
( )
{
}
( )
{
}
ω
ω
ω
j
X
j
j
X
j
X
Im
Re
+
=
(19.36)
na osnovu (19.35) možemo pisati
( )
{
}
(
)
{
}
Re
Re
X j
X
j
ω
ω
=
−
(19.37)
i
( )
{
}
(
)
{
}
Im
Im
X j
X
j
ω
ω
= −
−
(19.38)
što zna
č
i da je
( )
{
}
Re
X j
ω
parna funkcija a
( )
{
}
Im
X j
ω
neparna funkcija u
č
estanosti. Sli
č
an
rezultat se dobija ukoliko se Fourier-ov transformacioni par predstavi u polarnim koordinatama:
( )
( )
( )
j
X j
X j
e
ω
ω
ω
Θ
=
(19.39)
Tada je
( )
(
)
X j
X
j
ω
ω
=
−
(19.40)
( )
( )
ω
ω
Θ
= −Θ −
(19.41)
odnosno, moduo je parna a faza neparna funkcija u
č
estanosti.
Sada pretpostavimo da smo realni signal
( )
x t
dekomponovali u zbir njegovog parnog i
neparnog signala:
( )
( )
( )
e
o
x t
x t
x t
=
+
(19.42)
gde je
( )
( )
{ }
( )
{ }
;
e
o
x t
Ev x t
x
Od x t
=
=
(19.43)
Ako sada sra
č
unamo Fourier-ovu transformaciju signala
( )
e
x
t
−
:
( )
{
}
( )
( )
( )
{
j t
j t
e
e
e
}
e
x
t
x
t e
dt
x t e
dt
x
ω
ω
∞
∞
−
−
−∞
−∞
−
=
−
=
=
∫
∫
F
F
t
(19.44)
Me
đ
utim, znaju
ć
i da je
( )
( )
e
e
x
t
x t
− =
, lako zaklju
č
ujemo da je
( )
{
}
( )
{
{
}
}
*
e
e
x t
x
t
=
−
F
F
, što
zna
č
i da Fourier-ova transformacija
( )
{
}
e
x t
F
mora biti
č
isto realna funkcija. Potpuno analognim
zaklju
č
ivanjem se dolazi do rezultata da Fourier-ova transformacija
( )
{
}
0
x t
F
mora biti
č
isto
imaginarna funkcija, što nas dovodi do slede
ć
e dve relacije:
( )
{ }
( )
{
}
Re
Ev x t
X j
ω
↔
(19.45)
( )
{ }
( )
{
}
Im
Od x t
X j
ω
↔
(19.46)
Važan zaklju
č
ak ove analize je da parni signali imaju Fourier-ovu transformaciju koja je
č
isto
realna funkcija, dok neparni signali imaju
č
isto imaginarnu Fourier-ovu transformaciju.
Parseval-ova relacija
Prilikom
izvo
đ
enja uslova za konvergenciju Fourier-ove transformacije
( )
X j
ω
pominjali
smo uslov da signal
( )
x t
ima kona
č
nu energiju
( )
2
x
E
x t
dt
∞
−∞
=
∫
(19.47)
i
č
esto je vrednost ove energije izuzetno važna prilikom analize signala. Ponekada je jednostavno
sra
č
unati integral dat relacijom (19.47), me
đ
utim vrlo
č
esto je postupak zametan. Zbog toga je
razvijena metoda kojom se energija signala može sra
č
unati u frekvencijskom domenu. Ako
uvedemo pomo
ć
ni signal
( )
( )
2
g t
x t
=
i potražimo njegov transformacioni par:
( )
( )
2
j t
G j
x t
e
dt
ω
ω
∞
−
−∞
=
∫
(19.48)
prvo što prime
ć
ujemo jeste da je

Pitanje 20: Odabiranje signala u svetlu Fourier-ove transformacije
Jedna od klju
č
nih operacija koja se nad kontinualnim signalim može vršiti jeste odabiranje.
S obzirom da se ovom transformacijom kontinualni signali pretvaraju u diskretne, vrlo
č
esto se za
proces odabiranja koristi termin
analogno-digitalna konverzija
. Ukoliko želimo na neki
matemati
č
ki na
č
in da modeliramo proces odabiranja, najjednostavniji postupak je da uvedemo
periodi
č
nu povorku Dirakovih impulsa
( )
p t
:
(20.1)
( )
(
)
k
p t
t
kT
δ
∞
=−∞
=
−
∑
gde se perioda
T
uobi
č
ajeno naziva periodom odabiranja (u engl. literaturi je uobi
č
ajen naziv
sampling period
). Rezultat odabiranja nad nekim kontinualnim signalom
( )
x t
je signal
( )
y t
koji
se dobija množenjem sa povorkom impulsa
( )
p t
:
(20.3)
( )
( ) ( )
( ) (
)
( ) (
)
k
k
y t
x t p t
x t
t
kT
x kT
t
kT
δ
∞
∞
=−∞
=−∞
=
=
−
=
−
∑
∑
δ
Ilustracija ovih signala data je na slici 20.1.
( )
x t
t
( )
p t
t
0
T
2
T
2
T
−
T
−
1
( )
y t
t
( )
0
x
( )
x T
( )
x
T
−
0
T
T
−
2
T
−
2
T
Slika 20.1: Ilustracija procesa odabiranja
Polaze
ć
i od pretpostavke da se signali
( )
x t
i
( )
p t
množe kako bi formirali signal
, jasno je da
njihove Fourir-ove transformacije ulaze u konvoluciju:
( )
y t
( )
( ) (
1
2
Y j
X j
P j
)
ω
ω
π
=
ω
(20.4)
Kako je pri tome signal
( )
p t
periodi
č
an, njegov transformacioni par se može potražiti ili kroz
Fourier-ov red ili kroz Fourier-ovu transformaciju. Ako po
đ
emo od razvoja u Fourier-ov red:
( )
(
)
s
jk
t
k
k
k
p t
t
kT
a e
ω
δ
∞
∞
=−∞
=−∞
=
−
=
∑
∑
(20.5)
gde je
2 /
s
T
ω
π
=
u
č
estanost odabiranja, koeficijenti reda su
( )
/ 2
/ 2
1
1
,
0, 1, 2,...
s
T
jk
t
k
T
a
t e
dt
k
T
T
ω
δ
−
−
=
=
=
∫
± ±
)
s
(20.6)
Sada na osnovu (7.22) možemo pisati:
( )
(
)
(
k
s
s
k
k
P j
a
k
ω
π
δ ω
ω
ω
δ ω ω
∞
∞
=−∞
=−∞
= 2
−
=
−
∑
∑
(20.7)
Kona
č
no na osnovu (20.4), dalje možemo pisati
( )
( )
(
)
( ) (
)
(
)
(
)
1
*
2
1
1
s
s
k
s
s
k
k
Y j
X j
k
X j
k
X j
k
T
T
ω
ω ω
δ ω
ω
π
ω δ ω
ω
ω
ω
∞
=−∞
∞
∞
=−∞
=−∞
=
−
=
−
=
∑
∑
∑
−
(20.8)
Poslednja relacija nam govori da se Fourier-ova transformacija
( )
Y j
ω
sastoji od periodi
č
nog
ponavljanja frekvencijskog signala
(
X j
)
ω
centriranog oko celobrojnog umnoška u
č
estanosti
s
k
ω
gde je
s
ω
u
č
estanost odabiranja a
Dva primera ovakvih spektara su prikazana na
slikama 20.2. i 20.3. i me
đ
u njima postoji zna
č
ajna razlika.
0, 1, 2,...
k
= ± ±
( )
X j
ω
ω
b
ω
b
ω
−
A
( )
P j
ω
ω
s
ω
s
ω
0
s
ω
−
2
s
ω
2
s
ω
−
"
"
( )
Y j
ω
ω
b
ω
b
ω
−
/
A T
2
s
ω
−
s
ω
−
s
ω
2
s
ω
s
b
ω ω
−
Slika 20.2: Primer odabiranja signala bez efeka preklapanja

Marc-Antoine Parseval des Chênes
Born: 27 April 1755 in Rosières-aux-Saline, France
Died:
16 Aug 1836 in Paris, France
Very little is known of
Antoine Parseval
's life. We know that he was born into a family of high standing in France and
he describes himself as a squire, certainly suggesting that his family were wealthy land-owners. One of the few pieces
of information which exists is that he married Ursule Guerillot in 1795. The marriage certainly did not last long and the
pair were soon divorced.
The starting point of the historical events which were to play a major role in Parseval' life was the storming of the
Bastille on 14 July 1789. From this point the monarchy of Louis 16
th
was in major difficulties as the majority of
Frenchmen put aside their differences and united behind an attempt to destroy the privileged establishment of the
church and the state. Parseval, perhaps not surprisingly since he was of noble birth, was a royalist so for him the
increasing problems for the monarchy meant that his life was more and more in danger.
In 1792 Louis 16
th
gave up attempts at a compromise with opponents of the monarchy and tried to flee from France. He
did not make it but was arrested and brought back to Paris. It was a time of great danger for royalist supporters and
indeed it proved so for Parseval who was imprisoned in 1792.
Following the execution of the King on 21 January 1793 there followed a reign of terror with many political trials. By
the end of 1793 there were 4595 political prisoners held in Paris. However France began to have better times as their
armies, under the command of Napoleon Bonaparte, won victory after victory. This may have been good news for
France in general but royalists like Parseval, despite being freed from prison, remained in fear of their lives.
Napoleon became first Consul in 1800 and then Emperor in 1804. Parseval should have kept his head down if he
wanted at avoid trouble but it was a time when it was almost impossible not to get drawn into the political events.
Parseval published poetry against Napoleon's regime and, not surprisingly, had to flee from France when Napoleon
ordered his arrest. He was successful in avoiding arrest and was able to return to Paris.
Parseval had only five publications, all presented to the
Académie des Sciences
. The first was
Mémoire sur la
résolution des équations aux différences partielle linéaires du second ordre
dated 5 May 1798, the second was
Mémoire
sur les séries et sur l'intégration complète d'une équation aux differences partielle linéaires du second ordre, à
coefficiens constans
dated 5 April 1799, the third was
Ingégration générale et complète des équations de la propogation
du son, l'air étant considéré avec les trois dimensions
dated 5 July 1801, the fourth was
Ingégration générale et
complète de deux équations importantes dans la mécanique des fluides
dated 16 August 1803, and finally
Méthode
générale pour sommer, par le moyen des intégrales définies, la suite donnée par le théorème de M Lagrange, au moyen
de laquelle il trouve une valeur qui satisfait à une équation algébrique ou transcendente
dated 7 May 1804.
It was the second of these, dated 5 April 1799, which contains the result known today as Parseval's theorem. Today this
theorem is seen in the context of
Fourier series
, and often also in more abstract settings which are quite far removed
from Parseval's original ideas. The original theorem was concerned with summing infinite series. Parseval thought the
result was obvious and only remarked that it followed by using
de Moivre
's result for (cos
x
+
i
sin
x
)
n
. It also only
worked, he noted, when certain imaginary parts of two complex numbers cancelled out. This he reasonably suggested
was unfortunate and he hoped to remove this problem later. Indeed he did remove the problem and added a note to this
effect in his 1801 publication. The improved version, as given in 1801, states that if two series
M
=
a
n
x
n
and
m
=
b
n
x
n
are given then, substituting
x
= cos
u
+
i
sin
u
, and separating the answers into real and imaginary parts
M
=
p
+
iq
,
m
=
r
+
is
,
then
2
a
1
b
1
+
ab
+
a
3
b
3
+
ab
+ ... = (
2
/
π
)
pr
du
where the integral is taken from 0 to
π
. Of course we have modernised the notation, for example subscript notation was
not used in Parseval's time, and we have also corrected his theorem for he omitted the first 2 on the left hand side. The
error may well have been a typographical error in printing the article.
Parseval's result was not published until his five papers were all published by the
Académie des Sciences
in 1806.
Before that it was known by members of the
Académie
and appeared in works by
Lacroix
and
Poisson
before Parseval's
papers were printed.
Parseval was never honoured with election to the
Académie des Sciences
. He was proposed on five separate occasions,
namely in 1796, 1799, 1802, 1813 and 1828. He was never particularly close although he did come third in 1799, the
year that
Lacroix
was elected. It would not be unfair to say that Parseval has fared well in having a well known result,
which is quite far removed from his contribution, named after him. However he remains a somewhat shadowy figure
and it is hoped that research will one day provide a better understanding of his life and achievements.
Article by:
J J O'Connor
and
E F Robertson

odziv sistema se može napisati u analognoj formi:
( )
( ) ( )
1
2
j t
y t
H j
X j
e
d
ω
ω
ω
ω
π
∞
−
−∞
=
∫
(21.10)
podrazumevaju
ć
i da se svaka frekvencijska komponenta
( )
/ 2
j t
X j
e d
ω
ω
ω π
po kontinumu
u
č
estanosti prenosi kroz sistem skalirana vrednoš
ć
u
( )
H j
ω
.
Analiza LTI sistema na osnovu njegovog frekvencijskog odziva
(
H j
)
ω
se može sprovesti
na nekoliko razli
č
itih na
č
ina, pri
č
emu je naj
č
eš
ć
a analiza amplitude i faze. Ako na relaciju (21.2)
primenimo moduo, dobija se
( )
( ) ( )
Y j
H j
X j
ω
ω
=
ω
(21.11)
Poslednja relacija kaže da se amplituda spektra
( )
X j
ω
množi sa amplitudom frekvencijskog
odziva
( )
H j
ω
i da se na taj na
č
in dobija amplituda spektra izlaznog signala
( )
Y j
ω
. Sli
č
nu
relaciju možemo izvesti i za argumente:
( )
{
}
( )
{
}
( )
{
}
arg
arg
arg
Y j
H j
X j
ω
ω
=
+
ω
(21.12)
Ova relacija nam govori da se faza spektra signala
( )
y t
dobija kao zbir faze spektra ulaznog
signala
( )
x t
i faze frekvencijskog odziva
( )
{
}
arg
H j
ω
. Podsetimo se još da ako je impulsni odziv
sistema realna funkcija, tada je amplituda spektra parna funkcija a faza spektra neparna funkcija:
( )
(
)
H j
H
j
ω
ω
=
−
(21.13)
i
( )
{
}
(
)
{
}
arg
arg
H j
H
j
ω
ω
= −
−
(21.14)
Primer 21.1:
Posmatrajmo sistem
č
iji je impulsni odziv
( )
( )
at
h t
e u t
−
=
. Za ovaj sistem smo ve
ć
ra
č
unali odsko
č
ni odziv
( )
s t
primenom konvolucije:
( )
( ) ( )
(
)
( )
( )
0
1
*
at
t
e
s t
u t
h t
h t
d
h
d
u t
a
τ τ
τ τ
−
∞
−∞
−
=
=
−
=
=
∫
∫
(21.15)
Me
đ
utim, do istog rezulata se može do
ć
i primenom frekvencijskog odziva sistema:
( )
( ) ( )
S j
H j
U j
ω
ω
=
ω
(21.16)
znaju
ć
i da je
( )
( )
1
,
at
j t
H j
e u t e
dt
a
a
j
ω
ω
ω
∞
−
−
−∞
=
=
+
∫
0
>
(21.17)
i
( )
( )
1
U j
j
ω
πδ ω
ω
=
+
(21.18)
Podsetimo se da je rezultat (21.18) dobijen na osnovu integraljenja Dirakovog impulsa. Shodno
tome, spektar odziva sistema postaje
( )
( )
( ) ( )
(
)
( )
1
1
0
S j
H j
H
j
j
a j
1
a
ω
ω π
δ ω
π
δ ω
ω
ω
ω
⎛ ⎞
=
+
=
+ ⎜ ⎟
+
⎝ ⎠
(21.19)
Ukoliko želimo da iz frekvencijskog domena pre
đ
emo u vremenski, prvo predstavimo prvi sabirak
na desnoj strani relacije (21.19) u zbir parcijalnih razlomaka:
(
)
1
A
B
j
a j
j
a j
ω
ω
ω
=
+
+
+
ω
(21.20)
gde se koeficijenti
A
i
B
odre
đ
uju na poznati na
č
in:
( ) (
)
(
) (
)
0
/
1
1
1
lim
;
lim
a j
A
j
B
a j
j
a j
a
j
a j
a
ω
ω
ω
ω
ω
ω
ω
ω
→
→−
=
=
=
+
+
+
1
= −
)
(21.21)
Tada spektar
(
S j
ω
postaje
( )
( )
1 1
1
S j
a j
a
j
ω
πδ ω
ω
ω
⎡
⎤
=
−
+
⎢
⎥
+
⎣
⎦
(21.22)
Lako prepoznajemo da prvi i tre
ć
i sabirak u zagradi
č
ine Fourier-ovu transformaciju jedini
č
ne
odsko
č
ne funkcije
, dok drugi sabirak predstavlja kauzalni eksponent istog tipa kakav je
impulsni odziv, tako da odsko
č
ni odziv sistema postaje:
( )
u t
( )
( )
( )
( )
1
1
at
at
e
s t
u t
e u t
u t
a
a
−
−
−
⎡
⎤
=
−
=
⎣
⎦
(21.23)
Pitanje 22: Bode-ove karakteristike sistema
Uobi
č
ajeno je da se sistem predstavi tako što se amplituda frekvencijskog odziva sistema
( )
H j
ω
crta u log/log skali, pri
č
emu se na oordinatu nanose vrednosti u decibelima, odnosno
vrednosti
( )
( )
10
20 log
dB
H j
H j
ω
ω
=
. Ovakav prikaz se naziva amplitudskom karakteristikom
sistema, dok se fazna karakteistika sistema dobija tako što se opet na logaritamskom dijagramu crta
vrednost funkcije
( )
{
}
arg
H j
ω
za u
č
estanosti
ω
na apscisi u logaritamskoj srazmeri.
Kroz
slede
ć
e primere
ć
e biti ilustrovana tehnika crtanja frekvencijskih karakteristika, i bi
ć
e
pokazana tehnika aproksimacija prilikom crtanja amplitudskih frekvencijskih karakteristika.
Ovakve frekvencijske karakteristike se nazivaju Bode-ovim.
Primer 22.2:
Posmatrajmo sistem
č
iji je frekvencijski odziv
( )
0
0
1
b
j b
H j
a
j a
1
ω
ω
ω
+
=
+
(22.1)
Analizira
ć
emo tri karakteristi
č
na slu
č
aja vrednosti parametara
a
i
b
.
Prvi slu
č
aj:
Neka je
. Tada je frekvencijski odziv sistema
0
1
0
a
b
= =
( )
0
1
1
;
b
K
H j
K
j a
j
a
ω
ω
ω
0
b
=
=
=
(22.2)
Amplituda frekvencijskog odziva je u tom slu
č
aju:
( )
( )
( )
( )
10
10
10
20 log
20 log
20 log
dB
K
K
H j
H j
K
ω
ω
ω
ω
ω
⎛ ⎞
=
⇒
=
=
−
⎜ ⎟
⎝ ⎠
(22.3)

Prilikom crtanja Bodeovih karakteristika, uobi
č
ajeno je da se frekvencijski odziv sistema predstavi
u takozvanoj Bodovoj formi, u kojoj su polinomi u brojiocu i imeniocu faktorisani i pri
č
emu su
slobodni koeficijenti jednaki 1. U našem slu
č
aju Bodeove forma postaje:
( )
0
0
1
0
1
1
/
1
/
b
H j
k
a
j a a
j
ω
1
ω
ω λ
=
=
+
+
(22.6)
gde je
0
0
1
;
b
k
a
a
λ
=
=
0
a
(22.7)
U želji da nacrtamo amplitudsku karakteristiku, posmatrajmo moduo izraza (22.6)
( )
(
)
2
1
1
/
1
/
k
H j
k
j
ω
ω λ
ω λ
=
=
+
+
(22.8)
ili u decibelima:
( )
( )
2
10
10
10
20log
20log
10log
1
dB
H j
H j
k
ω
ω
ω
λ
⎛
⎞
⎛ ⎞
=
=
−
+
⎜
⎜ ⎟
⎜
⎝ ⎠
⎝
⎠
⎟⎟
(22.9)
Jasno je da se funkcije definisane relacijama (22.8) i (22.9) mogu skicirati ili nacrtati pomo
ć
u nekog
od programskih paketa ili programskih jezika, me
đ
utim, Bode je predložio vrlo jednostavnu
aproksimaciju koja dovodi do vrlo ta
č
nih aproksimativnih rešenja. Takvo aproksimativno rešenje se
za ovaj slu
č
aj sastoji u slede
ć
em: podelimo sve u
č
estanosti u dva podskupa:
ω λ
<
i
ω λ
>
. Za prvi
skup u
č
estanosti koli
č
nik /
ω λ
je manji od 1, pa
ć
emo taj koli
č
nik zanemariti u odnosu na sabirak
1, i aproksimacija amplitudske karakteristike postaje konstanta:
( )
20 log
dB
H j
ω λ
ω
< ⇒
≈
k
(22.10)
Sa druge strane, ukoliko je
ω λ
>
, koli
č
nik /
ω λ
je ve
ć
i od 1, pa se sabirak 1 može zanemariti u
odnosu na /
ω λ
. Tada aproksimacija dobija oblik:
( )
10
10
20log
20 log
dB
H j
k
ω
ω λ
ω
λ
> ⇒
≈
−
(22.11)
što jeste u logaritamskoj razmeri linearni segment sa nagibom od -20 decibela po dekadi. Spajaju
ć
i
ova dva linearna segmenta dobija se Bodeova amplitudska karakteristika sistema prikazana na slici
22.3.
( )
dB
H j
ω
ω
2
10
−
1
10
−
0
10
1
10
40
20
20
/
dB dec
−
dB
k
λ
3
dB
Slika 22.3: Bodeova amplitudska karakteristika sistema sa frekvencijskim odzivom (22.6)
Zanimljivo je proveriti u kojoj meri ovako dobijena aproksimativna amplitudska frekvencijska
karakteristika zaista odstupa od prave karakteristike. Lako se pokazuje da je najve
ć
e odstupanje
ovih karakteristika u kolenu aproksimativne funkcije u ta
č
ki
ω λ
=
i ono iznosi 3
dB.
Prava
karakteristika je prikazana na slici 22.3 isprekidanom linijom.
Fazna karakteristika sistema glasi:
( )
{
}
arg
arg
arctan
;
0
1
/
k
H j
k
j
ω
ω
ω λ
λ
⎧
⎫
=
= −
⎨
⎬
+
⎩
⎭
>
(22.12)
gde je opet pretpostavljeno da je poja
č
anje
k
pozitivno, ina
č
e se cela fazna karakteristika pomera za
ugao
π
. Oblik ove karakteristike je dat na slici 22.4.
( )
{
}
arg
H j
ω
ω
2
10
−
1
10
−
0
10
1
10
λ
/ 4
π
−
/ 2
π
−
Slika 22.4: Fazna frekvencijska karakteristika sistema
č
iji je frekvencijski odziv (22.36)
Tre
ć
i slu
č
aj:
Pretpostavimo da su svi koeficijenti
i razli
č
iti od nule. Ako ponovo
frekvencijski odziv predstavimo u Bodeovoj formi, dobi
ć
emo:
0
1
0
, ,
a a b
1
b
( )
0
1
0
1
0
0
1
0
1
0
1
/
1
/
1
/
1
/
b
j b
b
j b b
j
H j
k
a
j a
a
j a a
j
ω
ω
ω µ
ω
ω
ω
ω
+
+
λ
+
=
=
=
+
+
+
(22.13)
gde je
0
0
0
1
,
,
b
a
k
a
a
λ
µ
0
1
b
b
=
=
=
(22.14)
Pretpostavimo dalje da je
0,
0
k
λ
>
>
i
0
µ
>
. Tako
đ
e je važno imati informaciju koji je od
parametara
µ
i
λ
ve
ć
i, jer njihov odnos zna
č
ajno menja oblik amplitudske karakteristike. Otuda
razlikujemo dva slu
č
aja. Neka je u prvom slu
č
aju
λ µ
<
. Ako sada napišemo decibelski izraz za
moduo frekvencijskog odziva
( )
2
2
10
10
10
20log
10log
1
10log
1
dB
H j
k
ω
ω
µ
λ
⎛
⎞
⎛
⎞
⎛ ⎞
⎛ ⎞
⎜
⎟
=
+
+
−
+
⎜
⎜ ⎟
⎜ ⎟
⎜
⎜
⎟
⎝ ⎠
⎝ ⎠
⎝
⎠
⎝
⎠
ω
⎟⎟
(22.15)
o
č
igledno da sada postoje dve kriti
č
ne ta
č
ke za u
č
estanost
ω
i Bodeova aproksimacija se sastoji u
tome da ceo mogu
ć
i skup u
č
estanosti podelimo u tri podskupa. Prvi podskup je za
ω λ
<
. Tada su
koli
č
nici /
ω λ
i /
ω µ
manji od 1 pa
ć
e se ovi sabirci zanemariti u odnosu na 1:
( )
10
20 log
dB
dB
H j
k
ω λ
ω
< ⇒
≈
=
k
(22.16)
što predstavlja linearni segment sa nagibom od 0
dB
po dekadi. Za opseg u
č
estanosti
λ ω µ
< <
,
koli
č
nik /
ω λ
postaje ve
ć
i od 1 pa se 1 zanemaruje u odnosu na njega, dok je koli
č
nik /
ω µ
još
uvek manji od 1 pa se on zanemaruje u odnosu na 1. Tada aproksimacija postaje:

( )
2
2
10
10
10
10log
1
10log
1
20log
dB
dB
dB
H j
k
k
ω
ω
µ ω λ
ω
µ
λ
ω
µ
⎛
⎞
⎛
⎞
⎛ ⎞
⎛ ⎞
⎜
⎟
< < ⇒
=
+
+
−
+
⎜
⎟
⎜ ⎟
⎜ ⎟
⎜
⎟
⎜
⎟
⎝ ⎠
⎝ ⎠
⎝
⎝
⎠
⎛ ⎞
≈
+
⎜ ⎟
⎝ ⎠
⎠
(22.21)
( )
2
2
10
10
10
10
10
10log
1
10log
1
20log
20log
20log
dB
dB
dB
dB
H j
k
k
k
ω
ω
λ ω
ω
µ
λ
ω
ω
λ
µ
λ
µ
⎛
⎞
⎛
⎞
⎛ ⎞
⎛ ⎞
⎜
⎟
< ⇒
=
+
+
−
+
⎜
⎟
⎜ ⎟
⎜ ⎟
⎜
⎟
⎜
⎟
⎝ ⎠
⎝ ⎠
⎝
⎝
⎠
⎛ ⎞
⎛ ⎞
⎛ ⎞
≈
+
−
=
+
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎝ ⎠
⎝ ⎠
⎝ ⎠
⎠
(22.22)
Razlika u odnosu na prethodni slu
č
aj je u tome da je srednji segment, za u
č
estanosti
µ ω λ
< <
linearni segment sa nagibom od +20
dB
po dekadi. Oblik amplitudske i fazne karakteristike ovakvog
sistema dat je na slici 22.7.
( )
dB
H j
ω
ω
2
10
−
1
10
−
0
10
1
10
40
20
20
/
dB dec
dB
k
λ
µ
( )
{
}
arg
H j
ω
ω
2
10
−
1
10
−
0
10
1
10
/ 2
π
λ
µ
0
Slika 22.7: Amplitudska i fazna frekvencijska karakteristika sistema (22.13) za
µ λ
<
Korisno je da studenti nacrtaju asimptotske amplitudske i fazne karakteristike sistema sa slede
ć
im
frekvencijskim odzivima:
( )
( ) (
)(
)
( )
(
)
(
)(
)
(
)
(
)(
)
1
2
3
4
5
100
;
;
1 5
1
1 10
100 1 5
100 1 5
;
1
1 10
1
1 10
j
H j
H
j
j
j
j
j
j
H
j
H
j
j
j
j
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
=
=
+
+
+
+
−
=
=
+
+
+
+
ω
(22.23)
Pitanje 23: Filtracija signala
Jedna od osnovnih operacija koja se realizuje prilikom obrade signala jeste filtracija signala.
Pod izrazom filtar, se u tehnici, uglavnom podrazumeva neki podsistem ili ure
đ
aj sa specijalnom
namenom. U teoriji obrade signala pod filtrom se podrazumeva sistem sa specificiranom
amplitudskom i faznom karakteristikom. Naj
č
eš
ć
e su to, takozvani, frekvencijski selektivni filtri i
njihov oblik amplitudske karakteristike je dat na slici 23.1.
Za sve ove filtre se podrazumeva da je njihov impulsni odziv realna funkcija vremena, pa
otuda važi da je
( )
(
)
H j
H
j
ω
ω
=
−
(23.57)
( )
H j
ω
ω
b
ω
1
0
filtar propusnik
niskih u
č
estanosti
( )
H j
ω
ω
b
ω
1
0
filtar propusnik
visokih u
č
estanosti
( )
H j
ω
ω
1
ω
1
0
filtar propusnik
opsega u
č
estanosti
( )
H j
ω
ω
1
0
filtar nepropusnik
opsega u
č
estanosti
2
ω
1
ω
2
ω
Slika 23.1: Karakteristi
č
ni oblici amplituda frekvencijsko selektivnih filtara
Na primer, za idealan filtar propusnik niskih u
č
estanosti se usvaja slede
ć
a amplitudska
karakteristika:
( )
1 ,
0,
b
b
H j
ω ω
ω
ω ω
⎧
<
⎪
= ⎨
>
⎪⎩
(23.1)
Otuda, ako na ulaz ovakvog filtra dovedemo signal
( )
x t
, na njegovom izlazu
ć
e se pojaviti signal
,
č
ija je amplituda spektra
( )
y t
( )
( ) ( )
( )
,
0 ,
b
b
X j
Y j
H j
X j
ω
ω ω
ω
ω
ω
ω ω
⎧
<
⎪
=
= ⎨
>
⎪⎩
(23.2)
što zna
č
i da idelan niskopropusni filtar propušta samo one komponente signala koje su manje od
u
č
estanosti odsecanja
b
ω
a sve ostale odseca ili, koristi se termin, potiskuje.
Primer 23.1:
U pitanju broj 20 smo se bavili odabiranjem kontinualnih signala i pokazali da se kao
posledica odabiranja dobja signal
č
iji je spektar periodi
č
an. Vrlo
č
esto su te replike originalnog
signala na višim u
č
estanostima nepotrebne i štetne, i zbog toga se koristi takozvani postfiltar
č
iji je
osnovni zadatak da propusti frekvencijski sadržaj u osnovnom segmentu u
č
estanosti a da sve ostale
sadržaje potisne. Dakle, logi
č
no je da se za tu svrhu iskoristi filtar propusnik niskih u
č
estanosti.
Pretpostavimo da je u
č
estanost odabiranja pravilno izabrana, odnosno da je zadovoljen uslov
2
s
b
ω
ω
>
(23.3)
U želji da se spektar originalnog signala
( )
X j
ω
rekonstruiše iz spektra signala
( )
Y j
ω
,
isprojektujmo idealan filtar propusnik niskih u
č
estanosti:
( )
,
0 ,
c
L
c
T
H
j
ω ω
ω
ω ω
⎧
<
⎪
= ⎨
>
⎪⎩
(23.4)

ukoliko dozvolimo da varijabla
s
bude kompleksna, time pokrivamo mnogo širi spektar signala
( )
t
φ
a ne samo prostoperiodi
č
ne signale. Ovakav na
č
in razmišljanja nas dovodi do pojma
Laplace-ove transformacije.
Za bilo koji signal
( )
x t
definišemo njegovu Laplace-ovu transformaciju shodno relaciji
(24.2) na slede
ć
i na
č
in:
(24.3)
( )
( )
st
X s
x t e dt
∞
−
−∞
=
∫
Pitanje konvergencije Laplace-ove transformacije se može tretirati na sli
č
an na
č
in kao što smo
analizirali konvergenciju Fourier-ove transformacije. Naime, ako kompleksnu variajblu
s
napišemo
u formi
s
j
σ
ω
= +
, relacija (24.3) postaje
(24.4)
(
)
( )
(
)
( )
j
t
t
j t
X
j
x t e
dt
x t e
e
σ ω
σ
ω
σ
ω
∞
∞
− +
−
−
−∞
−∞
⎡
⎤
+
=
=
⎣
⎦
∫
∫
dt
što istovremeno predstavlja dokaz da je Laplace-ova tranformacija generalizacija Fourier-ove.
Naime, konvergencija Laplace-ove transformacije za signal
( )
x t
se svodi na problem
konvergencije Fourer-ove transformacije za signal
( )
t
x t e
σ
−
. Na osnovu toga možemo zaklju
č
iti da,
zbog uticaja
č
lana
t
e
σ
−
, vrlo
č
esto Laplace-ova transformacija konvergira i onda kada taj uslov nije
ispunjen za Fourier-ovu transformaciju.
Primer 24.1:
Posmatrajmo kauzalni signal
( )
( )
at
x t
e u t
−
=
(24.5)
U predavanju broj 7. smo pokazali da Fourier-ova transformacija ovog signala postoji za
i
ona je iznosila
0
a
>
( )
( )
{ }
1
;
X j
x t
a
a j
ω
ω
0
=
=
+
F
>
dt
(24.6)
Ako potražimo Laplace-ovu transformaciju ovog istog signala dobi
ć
emo:
(24.7)
( )
( )
(
)
0
0
a t
st
at
st
j t
X s
x t e dt
e e dt
e
e
σ
ω
∞
∞
∞ − +
−
−
−
−
−∞
=
=
=
∫
∫
∫
što predstavlja Fourier-ovu transformaciju za signal
(
)
( )
a t
e
u
σ
− +
t
. Otuda Laplace-ova transformacija
konvergira ukoliko je
0
a
σ
+ >
. Drugim re
č
ima, za bilo koju vrednost parametra
a
, Laplace-ova
transformacija konvergira za vrednosti
a
σ
> −
i glasi:
(
) ( )
1
,
X
j
a
j
σ
ω
σ
σ
ω
+
=
> −
+
+
a
(24.8)
ili ekvivalentno tome
( )
{ }
1
; Re
X s
s
s a
a
=
> −
+
(24.9)
Oblast kompleksne promenljive
s
za koju Laplace-ova transformacija konvergira se naziva
oblaš
ć
u
konvergencije
(u engleskoj literaturi se ona obi
č
no ozna
č
ava sa
ROC
od prvih slova re
č
i
Region Of
Convergence
) i kako je promenljiva
s
kompleksna sa svojim realnim i imaginarnim delom, ta oblast
se uobi
č
ajeno predstavlja kao geometrijsko mesto ta
č
aka u ravni. Za primer signala datog
jedna
č
inom (24.5) oblast konvergencije je prikazana na slici 24.1.
j
ω
σ
a
−
(
)
0
a
>
j
ω
σ
a
−
(
)
0
a
<
Slika 24.1: Oblast konvergencije za uslov
{ }
Re
s
a
> −
Kao i u slu
č
aju Fourier-ove transformacije, i Laplace-ova transformacija signala
( )
X s
u
najve
ć
em broju slu
č
ajeva se može napisati kao racionalna funkcija kompleksne promenljive
s
:
( )
( )
( )
,
B s
X s
s
A s
=
∈
ROC
(24.10)
gde oznaka
s R
zna
č
i da relacija važi pod uslovom da je kompleksna promenljiva
s
iz oblasti
konvergencije Laplace-ove transformacije. Pri tome podrazumevamo da je stepen polinoma
B
jednak
M
(uobi
č
ajeno se piše
OC
∈
( )
{
}
deg
B s
M
=
) a stepen polinoma
A
je jednak
N
, tj.
( )
{
}
deg
A s
=
N
. Laplace-ova transformacija
( )
X s
signala
( )
x t
se uvek može napisati u formi
(24.10) ukoliko je signal
( )
x t
neka linearna kombinacija eksponencijalnih signala (realnih ili
kompleksnih). Specijalno, ako je signal
( )
h t
impulsni odziv nekog sistema, Laplace-ova
transformacija
ć
e biti u formi (24.10) ako sistem može opisati linearnom diferencijalnom
jedna
č
inom sa konstantnim koeficijentima.
M
nula polinoma
( )
H s
( )
B s
se nazivaju nulama Laplace-ove
transformacije, dok se
N
nula polinoma
( )
A s
nazivaju polovima Laplace-ove transformacije.
O
č
igledno je da polovi racionalne funkcije
( ) ( )
/
B s A s
sigurno ne pripadaju oblasti konvergencije,
jer kada kompleksna promenljiva
s
uzme vrednost jednog od polova, tada koli
č
nik
( ) ( )
/
B s A s
teži
beskona
č
nosti. Shodno tome, strogo govore
ć
i pomo
ć
u pozicije nula i polova mi možemo definisati
racionalnu funkciju
( ) (
/
B s A s
)
, ali ako želimo da u potpunosti opišemo Laplace-ovu
transformaciju
neophodno je definisati i oblast konvergencije. Zbog toga se
č
esto Laplaceova
transformacija, kao što
ć
e to biti prikazano u slede
ć
em primeru, opisuje grafi
č
ki gde se pozicije nula
opisuju znakom , pozicije polova znakom a oblast konvergencije se osen
č
i kao u prethodnom
primeru.
( )
X s
'o'
'x'
Primer 24.2:
Neka je dat kauzalni signal
( )
( )
( )
;
at
bt
x t
e u t
e u t
a
−
−
=
+
b
≠
(24.11)

(24.14)
(
)
( )
t
j t
X
j
x t e
e
σ
ω
σ
ω
∞
−
−
−∞
⎡
⎤
+
=
⎣
⎦
∫
dt
shodno njoj možemo sinteti
č
ku relaciju napisati na slede
ć
i na
č
in:
( )
(
)
1
2
t
j t
x t e
X
j e d
σ
ω
σ
ω
π
∞
−
−∞
=
+
∫
ω
(24.15)
Množe
ć
i obe strane poslednje jednakosti sa
t
e
σ
, dobija se
( )
(
)
(
)
1
2
j
t
x t
X
j
e
σ ω
d
σ
ω
π
∞
+
−∞
=
+
∫
ω
(24.16)
ili uvode
ć
i smene
,
s
j
ds
jd
σ
ω
ω
= +
=
( )
( )
1
2
j
st
j
x t
X s
j
σ
σ
π
+ ∞
− ∞
=
∫
e ds
(24.17)
Relacija (24.17) se obi
č
no naziva inverznom Laplace-ovom transformacijom, i zajedno sa relacijom
(24.3) definiše takozvane Laplace-ove transormacione parove.
Č
injenica da funkcije
( )
x t
i
( )
X s
zadovoljavaju ove dve relacije (24.3) i (24.17) se
č
esto u literaturi ozna
č
ava jednom od slede
ć
ih
notacija:
( )
( )
{ }
( )
( )
{
}
( )
( )
1
,
,
X s
x t
x t
X s
x t
X s
−
=
=
↔
L
L
(24.18)
Relacija (24.17) nam kaže da se signal
( )
x t
može rekonstruisati na osnovu njegovog Laplace-ovog
transformacionog para, me
đ
utim, sra
č
unati ovaj integral je vrlo
č
esto ozbiljan posao i podrazumeva
takozvanu konturnu integraciju koja se izu
č
ava u teoriji funkcija kompleksnih varijabli. Ono što
ć
emo ovde napomenuti jeste da ukoliko funkcija
( )
X s
postoji, tada se integral (24.17) mora
ra
č
unati po pravoj
const
σ
=
. Ta prava mora pripadati oblasti konvergencije funkcije
( )
X s
, što
zna
č
i da oblast konvergencije mora biti takva da u njoj postoji pojas kona
č
ne širine i beskona
č
ne
dužine:
{ }
1
2
Re
s
σ
σ
<
<
.
Osobine Laplace-ove transformacije
Sli
č
no kao i kod Fourier-ove transormacije, jednostavno se izvode slede
ć
e osobine:
linearnost
( )
( )
( )
( )
1
2
1
2
ax t
bx t
aX s
bX s
+
↔
+
(24.19)
pri
č
emu treba voditi ra
č
una da se oblast konvergencije ovako dobijene linearne kombinacije
signala dobija kao presek pojedin
č
anih oblasti konvergencija.
pomeranje u vremenu
(
)
( )
0
0
st
x t t
e
X s
−
−
↔
(24.20)
modulacija
( )
(
)
0
0
s t
e x t
X s s
↔
−
(24.21)
skaliranje
( )
1
s
x at
X
a
a
⎛ ⎞
↔
⎜ ⎟
⎝ ⎠
(24.22)
diferenciranje i integraljenje
( )
( )
dx t
sX s
dt
↔
(24.23)
( )
( )
dX s
tx t
ds
−
↔
(24.24)
( )
( )
1
t
x
d
X
s
τ τ
−∞
↔
∫
s
(24.25)
konvolucija signala
( )
( )
( ) ( )
1
2
1
2
*
x t
x t
X s X s
↔
(24.26)
gde opet treba naglasiti da je oblast konvergencije konvolucije dva signala, jednaka preseku
pojedinih oblasti konvergencije za svaki od signala ponaosob koji ulaze u konvoluciju.
Na osnovu navedenih osobina, ili primenom definicionog izraza kojim se sra
č
unava
Laplace-ova transformacija (24.3), lako se dolazi do slede
ć
e table Laplace-ovih transformacija za
č
esto koriš
ć
ene signale:
Signal
( )
x t
Laplace-ova
transformacija
( )
X s
Oblast konvergencije
( )
t
δ
1 Svako
s
( )
u t
1
s
{ }
Re
0
s
>
( )
u t
− −
1
s
{ }
Re
0
s
<
( )
at
e u t
−
1
s a
+
{ }
Re
s
a
> −
( )
at
e u t
−
−
−
1
s a
+
{ }
Re
s
a
< −
( )
at
te u t
−
(
)
2
1
s a
+
{ }
Re
s
a
> −
( ) (
0
sin
t u t
ω
)
0
2
2
0
s
ω
ω
+
{ }
Re
0
s
>
( ) (
0
cos
t u t
ω
)
2
2
0
s
s
ω
+
{ }
Re
0
s
>
( ) (
0
sin
at
e
t u
ω
−
)
t
(
)
0
2
2
0
s a
ω
ω
+
+
{ }
Re
s
a
> −

Imparting geometry, trigonometry, elementary analysis, and statics to adolescent cadets of good family, average
attainment, and no commitment to the subjects afforded little stimulus, but the post did permit Laplace to stay in Paris.
He began producing a steady stream of remarkable mathematical papers, the first presented to the
Académie des
Sciences
in Paris on 28 March 1770. This first paper, read to the Society but not published, was on maxima and minima
of curves where he improved on methods given by
Lagrange
. His next paper for the Academy followed soon
afterwards, and on 18 July 1770 he read a paper on
difference equations
.
Laplace's first paper which was to appear in print was one on the integral calculus which he translated into Latin and
published at Leipzig in the
Nova acta eruditorum
in 1771. Six years later Laplace republished an improved version,
apologising for the 1771 paper and blaming errors contained in it on the printer. Laplace also translated the paper on
maxima and minima into Latin and published it in the
Nova acta eruditorum
in 1774. Also in 1771 Laplace sent another
paper
Recherches sur le calcul intégral aux différences infiniment petites, et aux différences finies
to the
Mélanges de
Turin.
This paper contained equations which Laplace stated were important in mechanics and physical astronomy.
The year 1771 marks Laplace's first attempt to gain election to the
Académie des Sciences
but
Vandermonde
was
preferred. Laplace tried to gain admission again in 1772 but this time Cousin was elected. Despite being only 23 (and
Cousin 33) Laplace felt very angry at being passed over in favour of a mathematician who was so clearly markedly
inferior to him.
D'Alembert
also must have been disappointed for, on 1 January 1773, he wrote to
Lagrange
, the
Director of Mathematics at the
Berlin Academy of Science
, asking him whether it might be possible to have Laplace
elected to the
Berlin Academy
and for a position to be found for Laplace in Berlin.
Before
Lagrange
could act on
d'Alembert
's request, another chance for Laplace to gain admission to the Paris
Académie
arose. On 31 March 1773 he was elected an adjoint in the
Académie des Sciences
. By the time of his election he had
read 13 papers to the
Académie
in less than three years.
Condorcet
, who was permanent secretary to the
Académie
,
remarked on this great number of quality papers on a wide range of topics.
We have already mentioned some of Laplace's early work. Not only had he made major contributions to difference
equations and
differential equations
but he had examined applications to mathematical astronomy and to the
theory of
probability
, two major topics which he would work on throughout his life. His work on mathematical astronomy before
his election to the Academy included work on the inclination of planetary orbits, a study of how planets were perturbed
by their moons, and in a paper read to the
Académie
on 27 November 1771 he made a study of the motions of the
planets which would be the first step towards his later masterpiece on the stability of the
solar system
.
Laplace's reputation steadily increased during the 1770s. It was the period in which he [
1
]:-
... established his style, reputation, philosophical position, certain mathematical techniques, and a programme of
research in two areas, probability and celestial mechanics, in which he worked mathematically for the rest of his life.
The 1780s were the period in which Laplace produced the depth of results which have made him one of the most
important and influential scientists that the world has seen. It was not achieved, however, with good relationships with
his colleagues. Although
d'Alembert
had been proud to have considered Laplace as his protégé, he certainly began to
feel that Laplace was rapidly making much of his own life's work obsolete and this did nothing to improve relations.
Laplace tried to ease the pain for
d'Alembert
by stressing the importance of
d'Alembert
's work since he undoubtedly felt
well disposed towards
d'Alembert
for the help and support he had given.
It does appear that Laplace was not modest about his abilities and achievements, and he probably failed to recognise the
effect of his attitude on his colleagues.
Lexell
visited the
Académie des Sciences
in Paris in 1780-81 and reported that
Laplace let it be known widely that he considered himself the best mathematician in France. The effect on his
colleagues would have been only mildly eased by the fact that Laplace was right! Laplace had a wide knowledge of all
sciences and dominated all discussions in the
Académie
. As
Lexell
wrote:-
... in the Academy he wanted to pronounce on everything.
It was while
Lexell
was in Paris that Laplace made an excursion into a new area of science [
2
]:-
Applying quantitative methods to a comparison of living and nonliving systems, Laplace and the chemist Antoine
Lavoisier in
1780,
with the aid of an ice calorimeter that they had invented, showed respiration to be a form of
combustion.
Although Laplace soon returned to his study of mathematical astronomy, this work with Lavoisier marked the
beginning of a third important area of research for Laplace, namely his work in physics particularly on the theory of
heat which he worked on towards the end of his career.
In 1784 Laplace was appointed as examiner at the Royal Artillery Corps, and in this role in 1785, he examined and
passed the 16 year old Napoleon Bonaparte. In fact this position gave Laplace much work in writing reports on the
cadets that he examined but the rewards were that he became well known to the ministers of the government and others
in positions of power in France.
Laplace served on many of the committees of the
Académie des Sciences
, for example
Lagrange
wrote to him in 1782
saying that work on his
Traité de mécanique analytique
was almost complete and a committee of the
Académie des
Sciences
comprising of
Laplace
, Cousin,
Legendre
and
Condorcet
was set up to decide on publication. Laplace served
on a committee set up to investigate the largest hospital in Paris and he used his expertise in probability to compare
mortality rates at the hospital with those of other hospitals in France and elsewhere.
Laplace was promoted to a senior position in the
Académie des Sciences
in 1785. Two years later
Lagrange
left Berlin
to join Laplace as a member of the
Académie des Sciences
in Paris. Thus the two great mathematical geniuses came
together in Paris and, despite a rivalry between them, each was to benefit greatly from the ideas flowing from the other.
Laplace married on 15 May 1788. His wife, Marie-Charlotte de Courty de Romanges, was 20 years younger than the 39
year old Laplace. They had two children, their son Charles-Emile who was born in 1789 went on to a military career.
Laplace was made a member of the committee of the
Académie des Sciences
to standardise weights and measures in
May 1790. This committee worked on the metric system and advocated a decimal base. In 1793 the Reign of Terror
commenced and the
Académie des Sciences
, along with the other learned societies, was suppressed on 8 August. The
weights and measures commission was the only one allowed to continue but soon Laplace, together with Lavoisier,
Borda
,
Coulomb
,
Brisson
and
Delambre
were thrown off the commission since all those on the committee had to be
worthy:-
... by their Republican virtues and hatred of kings.
Before the 1793 Reign of Terror Laplace together with his wife and two children left Paris and lived 50 km southeast of
Paris. He did not return to Paris until after July 1794. Although Laplace managed to avoid the fate of some of his
colleagues during the Revolution, such as Lavoisier who was guillotined in May 1794 while Laplace was out of Paris,
he did have some difficult times. He was consulted, together with
Lagrange
and Laland, over the new calendar for the
Revolution. Laplace knew well that the proposed scheme did not really work because the length of the proposed year
did not fit with the astronomical data. However he was wise enough not to try to overrule political dogma with scientific
facts. He also conformed, perhaps more happily, to the decisions regarding the metric division of angles into 100
subdivisions.
In 1795 the École Normale was founded with the aim of training school teachers and Laplace taught courses there
including one on probability which he gave in 1795. The École Normale survived for only four months for the 1200
pupils, who were training to become school teachers, found the level of teaching well beyond them. This is entirely
understandable. Later Laplace wrote up the lectures of his course at the École Normale as
Essai philosophique sur les
probabilités
published in 1814. A review of the
Essai
states:-
... after a general introduction concerning the principles of probability theory, one finds a discussion of a host of
applications, including those to games of chance, natural philosophy, the moral sciences, testimony, judicial decisions
and mortality.
In 1795 the
Académie des Sciences
was reopened as the Institut National des Sciences et des Arts. Also in 1795 the
Bureau des Longitudes was founded with
Lagrange
and Laplace as the mathematicians among its founding members
and Laplace went on to lead the Bureau and the Paris Observatory. However although some considered he did a fine job
in these posts others criticised him for being too theoretical.
Delambre
wrote some years later:-
... never should one put a geometer at the head of an observatory; he will neglect all the observations except those
needed for his formulas.
Delambre
also wrote concerning Laplace's leadership of the Bureau des Longitudes:-

The first book studies generating functions and also approximations to various expressions occurring in probability
theory. The second book contains Laplace's definition of probability,
Bayes
's rule (so named by
Poincaré
many years
later), and remarks on moral and mathematical expectation. The book continues with methods of finding probabilities of
compound events when the probabilities of their simple components are known, then a discussion of the method of least
squares,
Buffon
's needle problem, and inverse probability. Applications to mortality, life expectancy and the length of
marriages are given and finally Laplace looks at moral expectation and probability in legal matters.
Later editions of the
Théorie Analytique des Probabilités
also contains supplements which consider applications of
probability to: errors in observations; the determination of the masses of Jupiter, Saturn and Uranus; triangulation
methods in surveying; and problems of geodesy in particular the determination of the meridian of France. Much of this
work was done by Laplace between 1817 and 1819 and appears in the 1820 edition of the
Théorie Analytique.
A rather
less impressive fourth supplement, which returns to the first topic of generating functions, appeared with the 1825
edition. This final supplement was presented to the Institute by Laplace, who was 76 years old by this time, and by his
son.
We mentioned briefly above Laplace's first work on physics in 1780 which was outside the area of mechanics in which
he contributed so much. Around 1804 Laplace seems to have developed an approach to physics which would be highly
influential for some years. This is best explained by Laplace himself:-
... I have sought to establish that the phenomena of nature can be reduced in the last analysis to actions at a distance
between molecule and molecule, and that the consideration of these actions must serve as the basis of the mathematical
theory of these phenomena.
This approach to physics, attempting to explain everything from the forces acting locally between molecules, already
was used by him in the fourth volume of the
Mécanique Céleste
which appeared in 1805. This volume contains a study
of pressure and density, astronomical refraction, barometric pressure and the transmission of gravity based on this new
philosophy of physics. It is worth remarking that it was a new approach, not because theories of molecules were new,
but rather because it was applied to a much wider range of problems than any previous theory and, typically of Laplace,
it was much more mathematical than any previous theories.
Laplace's desire to take a leading role in physics led him to become a founder member of the Société d'Arcueil in
around 1805. Together with the chemist Berthollet, he set up the Society which operated out of their homes in Arcueil
which was south of Paris. Among the mathematicians who were members of this active group of scientists were
Biot
and
Poisson
. The group strongly advocated a mathematical approach to science with Laplace playing the leading role.
This marks the height of Laplace's influence, dominant also in the Institute and having a powerful influence on the
École Polytechnique and the courses that the students studied there.
After the publication of the fourth volume of the
Mécanique Céleste,
Laplace continued to apply his ideas of physics to
other problems such as capillary action (1806-07), double refraction (1809), the velocity of sound (1816), the theory of
heat, in particular the shape and rotation of the cooling Earth (1817-1820), and elastic fluids (1821). However during
this period his dominant position in French science came to an end and others with different physical theories began to
grow in importance.
The Société d'Arcueil, after a few years of high activity, began to become less active with the meetings becoming less
regular around 1812. The meetings ended completely the following year.
Arago
, who had been a staunch member of the
Society, began to favour the wave theory of light as proposed by
Fresnel
around 1815 which was directly opposed to the
corpuscular theory which Laplace supported and developed. Many of Laplace's other physical theories were attacked,
for instance his caloric theory of heat was at odds with the work of
Petit
and of
Fourier
. However, Laplace did not
concede that his physical theories were wrong and kept his belief in fluids of heat and light, writing papers on these
topics when over 70 years of age.
At the time that his influence was decreasing, personal tragedy struck Laplace. His only daughter, Sophie-Suzanne, had
married the Marquis de Portes and she died in childbirth in 1813. The child, however, survived and it is through her that
there are descendants of Laplace. Laplace's son, Charles-Emile, lived to the age of 85 but had no children.
Laplace had always changed his views with the changing political events of the time, modifying his opinions to fit in
with the frequent political changes which were typical of this period. This way of behaving added to his success in the
1790s and 1800s but certainly did nothing for his personal relations with his colleagues who saw his changes of views
as merely attempts to win favour. In 1814 Laplace supported the restoration of the Bourbon monarchy and cast his vote
in the Senate against Napoleon. The Hundred Days were an embarrassment to him the following year and he
conveniently left Paris for the critical period. After this he remained a supporter of the Bourbon monarchy and became
unpopular in political circles. When he refused to sign the document of the
French Academy of Sciences
supporting
freedom of the press in 1826, he lost the remaining friends he had in politics.
On the morning of Monday 5 March 1827 Laplace died. Few events would cause the Academy to cancel a meeting but
they did on that day as a mark of respect for one of the greatest scientists of all time. Surprisingly there was no quick
decision to fill the place left vacant on his death and the decision of the
French Academy of Sciences
in October 1827
not to fill the vacant place for another 6 months did not result in an appointment at that stage, some further months
elapsing before
Puissant
was elected as Laplace's successor.
Article by:
J J O'Connor and E F Robertson

antikauzalnim impulsnim odzivom, oblast konvergencije je u obliku
{ }
max
Re
s
σ
<
, levo od položaja
polova funkcije prenosa. Me
đ
utim, to ne zna
č
i da je sistem
č
ija funkcija prenosa ima oblik
konvergencije
{ }
max
Re
s
σ
>
kauzalan, ve
ć
samo da je njegov impulsni odziv ograni
č
en sa leve
strane. Sli
č
no tome, ako je oblast konvergencije funkcije prenosa u obliku
{ }
max
Re
s
σ
<
, to ne zna
č
i
da je on antikauzalan ve
ć
samo da mu je impulsni odziv ograni
č
en sa desne strane. Me
đ
utim, može
se pokazati, da ako se funkcija prenosa sistema
( )
H s
može predstaviti u obliku zbira parcijalnih
razlomaka
( )
( )
( )
1
N
k
N
k
k
B s
r
H s
b
A s
s
=
=
=
+
s
+
∑
(25.8)
bez dodatnih
č
lanova
k
st
e
koji poti
č
u od vremenskih kašnjenja, tada konvergencija tipa
{ }
max
Re
s
σ
>
uvek ukazuje na kauzalni sistem a konvergencija oblika
{ }
max
Re
s
σ
<
ozna
č
ava
antikauzalni sistem. Tako je, na primer, sistem funkcije prenosa
( )
(
1/
1
H s
s
=
+
)
sa oblaš
ć
u
konvergencije
{ }
Re
1
s
> −
kauzalan, dok sistem sa funkcijom prenosa
i istom
oblaš
ć
u konvergencije nije kauzalan.
( )
(
)
/
1
s
H s
e
s
=
+
Stabilnost sistema
Prilikom analize BIBO stabilnosti kontinualnih LTI sistema došli smo do potrebnog i
dovoljnog uslova koji treba da zadovolji impulsni odziv sistema
( )
h t dt
∞
−∞
< ∞
∫
(25.9)
da bi sistem bio BIBO stabilan. Me
đ
utim, ovaj uslov je identi
č
an Dirichlet-ovom uslovu koji treba
da zadovolji neperiodi
č
an signal da bi njegova Fourier-ova transformacija konvergirala (osim za
ograni
č
en skup specijalnih signala). To zna
č
i da je uslov stabilnosti identi
č
an Dirichlet-ovom
uslovu konvergencije. Ovaj se uslov može preformulisati u svetlu Laplace-ove transformacije:
Potreban i dovoljan uslov da sistem bude BIBO stabilan jeste da prava s
j
ω
=
pripada oblasti
konvergencije funkcije prenosa sistema.
U kontekstu ovakve definicije postoje
č
etiri razli
č
ite
mogu
ć
nosti za oblast konvergencije koje zadovoljavaju navedeni uslov. Ove
č
etiri mogu
ć
nosti su
prikazane na slici 25.1.
j
ω
σ
j
ω
σ
j
ω
σ
j
ω
σ
Slika 25.1: Mogu
ć
e oblasti konvergencije stabilnih sistema
Slu
č
aj u gornjem levom uglu odgovara sistemu koji je stabilan i
č
iji je impulsni odziv
ograni
č
en sa leve strane, gornja desna oblast konvergencije odgovara sistemu koji je stabilan i
č
iji je
impulsni odziv ograni
č
en sa desne strane, donja leva oblast konvergencije odgovara stabilnom
sistemu
č
iji je impulsni odziv neograni
č
en sa obe strane, dok oblast konvergencije u donjem
desnom uglu odgovara sistemu
č
iji je impulsni odziv ograni
č
enog trajanja. Ono što je za nas
zanimljivo, jeste da
kauzalni, stabilni sistemi moraju imati oblast konvergencije kakva je prikazana
na gornjoj levoj slici,
odnosno mora postojati neko negativno
max
σ
takvo da je oblast konvergencije
{ }
max
Re
s
σ
>
.
Strukturni blok dijagrami sistema
Vrlo
č
esto se složeni sistemi, koji se sastoje od velikog broja podsistema prikazuju
strukturnim blok dijagramom, u kome se svaki podsistem prikazuje pravougaonikom u kome je
upisana njegova funkcija prenosa, dok se linijama ozna
č
ava protok signala izme
đ
u njih. Postoje
posebne tehnike kojima se, za tako složene sistema, može odrediti ekvivalentna funkcija prenosa. U
ovom predmetu
ć
e bili ilustrovana najjednostavnija tehnika koja se zasniva na elementarnim
transformacijama blokova. Tri najjednostavnije elementarne transformacije su:

Primer 25.2:
Za sistem prikazan na slici 25.6. odrediti ekvivalentnu funkciju prenosa.
( )
1
H s
( )
2
H s
( )
3
H s
( )
x t
+
−
( )
4
H s
( )
5
H s
+
+
( )
y t
Slika 25.6:Strukturni blok dijagram složenog sistema
Pojednostavljenje datog sistema se vrši u
č
etiri koraka. U prvom koraku se redna veza blokova
i
se ekvivalentno može predstaviti jednim blokom funkcije prenosa
, zatim se redna veza blokova
( )
1
H s
( )
2
H s
( )
( ) ( )
12
1
2
H
s
H s H s
=
( )
4
H s
i
( )
5
H s
zamenjuje blokom funkcije
prenosa
. Slede
ć
i korak je da se paralelna veza blokova
i
( )
( ) ( )
45
4
5
H
s
H s H s
=
( )
12
H
s
( )
3
H s
zameni blokom funkcije prenosa
( )
( )
( )
123
12
3
H
s
H
s
H s
=
+
i poslednji korak je da se primeni
ekvivalentna funkcija prenosa za sistem sa povratnom spregom:
( )
( )
( )
( )
( )
( )
( ) ( )
( )
( ) ( )
( )
(
)
( ) ( )
123
1
2
3
123
45
1
2
3
4
5
1
1
Y s
H
s
H s H s
H s
H s
X s
H
s H
s
H s H s
H s H s H s
+
=
=
=
+
+
+
(25.12)
Unilateralna (jednostrana) Laplace-ova transformacija
Laplace-ova
transformacija
koja je definisana na po
č
etku ovog predavanja se vrlo
č
esto
ozna
č
ava kao
dvostrana
ili
bilateralna
(koristi se skra
ć
enica BLT) jer su granice integrala
podintegralne funkcije koja definiše Laplace-ovu transformaciju od
−∞
do . Me
đ
utim, vrlo
č
esto
se Laplace-ova transformacija koristi za analizu kauzalnih (dakle realnih sistema) i shodno tome
kauzalnih signala. Otuda se pojavljuje potreba za uvo
đ
enjem unilateralne ili jednostrane Laplace-
ove transformacije (koristi se skra
ć
enica ULT) kauzalnog signala
∞
( )
x t
na slede
ć
i na
č
in:
(25.13)
( )
( )
0
st
X s
x t e dt
∞
−
=
∫
Uvo
đ
enje ovakve jednostrane Laplace-ove transformacije je korisno ne samo sa stanovišta analize
kauzalnih sistema i kauzalnih signala ve
ć
i sa stanovišta rešavanja diferencijalnih jedna
č
ina sa
konstantnim koeficijentima i nenultim po
č
etnim uslovima, što
ć
e biti objašnjeno u slede
ć
em
pitanju. Me
đ
utim, ovde se otvara jedno zna
č
ajno pitanje: Ako su signali koje posmatramo ili sistemi
koje analiziramo kauzalni, logi
č
no je da donja granica integrala u relaciji (25.13) bude nula,
me
đ
utim, kako se onda tretira Dirakov impuls koji je svuda jednak nuli osim za
, pri
č
emu nam
je ovaj signal vrlo važan s obzirom da se preko njega definiše impulsni odziv sistema. Zbog toga se
u nekoj literaturi može na
ć
i definicija Laplace-ove transformacije na slede
ć
i na
č
in:
0
t
=
(25.14)
( )
( )
0
st
X s
x t e dt
−
∞
−
=
∫
gde je donja granica integrala 0 zamenjena sa 0
−
. Ovakva definicija Laplace-ove transformacije je
vrlo zahvalna i sa aspekta nalaženja odziva sistema koji je u nultom trenutku imao po
č
etne uslove.
Sa druge strane, ukoliko se opredelimo za rad sa isklju
č
ivo kauzalnim signalima, podrazumeva se
da je
za
, pa je i
( )
0
x t
=
0
x
<
( )
0
x
−
0
=
i po
č
etnu vrednost signala treba tražiti u obliku
( )
0
x
+
,
pa se otuda vrlo
č
esto može na
ć
i i slede
ć
a definicija unilateralne Laplace-ove transformacije:
(25.15)
( )
( )
0
st
X s
x t e dt
+
∞
−
=
∫
Osnovni nedostatak ovakve definicije je taj što bi u tom slu
č
aju Laplace-ova transformacija
Dirakovog impulsa bila jednaka nuli, što je neprihvatljivo sa stanovišta dalje primene
transformacije. Kako god bilo, svaka od ovih definicija (25.13-15) ima svojih nedostataka i svojih
prednosti za pojedine primene, i mi
ć
emo se zbog toga držati definicije (25.13), imaju
ć
i u vidu
slede
ć
u napomenu: kada je signal
( )
x t
definisan kao kauzalni signal vrednost
( )
0
x
implicitno
ozna
č
ava
, dok u slu
č
aju da primenjujemo Laplace-ovu transformaciju za izra
č
unavanje
odziva nekog sistema koji je u trenutku
( )
0
x
+
0
t
=
imao u sebi akumuliranu energiju, što zna
č
i da je
imao nenulte po
č
etne uslove, ili da je u pitanju Dirakov signal koji je definisan na specifi
č
an na
č
in,
ili signal
koji u nuli i nije definisan, vrednost
( )
u t
( )
0
x
implicitno treba podrazumevati kao
.
( )
0
x
−
Osobine dvostrane Laplace-ove transformacije koje smo izveli i naveli u dosadašnjem tekstu
važe i za jednostranu Laplace-ovu transformaciju, uz par izuzetaka.
Najvažniji izuzetak jeste da ukoliko je
( )
x t
kauzalni signal i njemu odgovaraju
ć
a
Laplace-ova transformacija
, tada se jednostrana Laplace-ova transformacija signala
može sra
č
unati, primenom parcijalne integracije, na slede
ć
i na
č
in:
( )
X s
( )
/
dx t dt
( )
( )
( )
( ) ( )
0
0
0
0
st
st
st
dx t
e dt
x t e
s
x t e dt sX s
x
dt
+
∞
∞
∞
−
−
−
=
+
=
−
∫
∫
(25.16)
Primetimo da
č
lan
( )
0
x
−
nije postojao u relaciji za dvostranu Laplace-ovu transformaciju izvoda
vremenskog signala. Sli
č
no tome se pokazuje da je Laplace-ova transformacija drugog izvoda
kauzalnog signala
( )
x t
jednaka:
( )
( )
( )
( )
2
2
2
0
' 0
d x t
s X s
sx
x
dt
↔
−
−
(25.17)
ili u opštem slu
č
aju:
( )
( )
( )
( )
(
)
( )
1
1
2
0
' 0
n
n
n
n
n
n
d x t
s X s
s x
s
x
x
dt
−
−
−
↔
−
−
− −
"
0 (25.18)
Druga važna razlika izme
đ
u unilateralne i bilateralne Laplace-ove transformacije jeste da ukoliko se
funkcija prenosa sistema ili Laplace-ova transformacija napišu u formi zbira parcijalnih razlomaka,
da bi se znalo o kom signalu je re
č
, BLT zahteva da se nazna
č
i oblast konvergencije, dok kod ULT
to nije neophodno. Kako ULT operiše samo sa kauzalnim signalima i sistemima, jasno je da je
oblast konvergencije oblika
{ }
max
Re
s
σ
>
. Ova
č
injenica ima za prednost i to da je pitanje
stabilnosti sistema u svetlu unilateralne Laplace-ove transformacije mnogo jednostavnije. Naime,
ako je oblast konvergencije takva da je
max
σ
negativno, što zna
č
i da su svi polovi funkcije prenosa
sa negativnim realnim delom, tada je prava
( )
H s
s
j
ω
=
obuhva
ć
ena oblaš
ć
u konvergencije, pa je

Primer 25.4:
Funkcija prenosa kauzalnog LTI sistema jednaka je
( )
2
1
s
H s
s
=
−
(25.27)
Odredimo impulsni i odsko
č
ni odziv ovog sistema i ispitajmo njegovu stabilnost. Kako je re
č
eno da
je u pitanju kauzalni sistem možemo da operišemo sa unilateralnom Laplace-ovom
transformacijom, i zbog toga nije ni data oblast konvergencije. Uostalom, sami je možemo odrediti.
Kako se polovi ovog sistema odre
đ
uju iz uslova da je polinom u imeniocu jednak nuli, odnosno
, zaklju
č
ujemo da su polovi
i
2
1
s
=
1
1
s
=
2
1
s
= −
pa je oblast konvergencije
{ }
Re
1
s
>
(25.28)
i kako je
max
1 0
σ
= >
, zaklju
č
ujemo da je sistem nestabilan. Dalje, impulsni odziv možemo
sra
č
unati ili primenom inverzne Laplace-ove transformacije na navedenu funkciju prenosa, ili ako
napišemo u formi zbira parcijalnih razlomaka možemo prepoznati odgovaraju
ć
e sabirke:
( )
H s
( ) ( )( )
0.5
0.5
1
1
1
s
H s
s
s
s
s
=
=
1
+
−
+
−
+
(25.29)
Prvi sabirak u poslednjoj relaciji odgovara signalu
( )
0.5
t
e u t
a drugi signalu
( )
0.5
t
e u t
−
, pa je
impulsni odziv sistema
( )
(
)
( )
0.5
t
t
h t
e
e
u t
−
=
+
(25.30)
Sli
č
no tome, možemo odrediti odsko
č
ni odziv sistema. Znaju
ć
i da je Laplace-ova transformacija
jedini
č
ne odsko
č
ne funkcije
, Laplace-ova transformacija odsko
č
nog odziva bi
ć
e:
( )
1/
U s
s
=
( )
( ) ( )
(
)(
)
2
1
1
0.5
1
1
1
1
S s
H s U s
s
s
s
s
s
=
=
=
=
−
0.5
1
−
−
+
−
+
(25.31)
pa
ć
e odsko
č
ni odziv biti
( )
(
)
( )
0.5
t
t
s t
e
e
u t
−
=
−
(25.32)
Primena unilateralne Laplace-ove transformacije za nalaženje odziva linearnih sistema i
rešavanje linearnih diferencijalnih jedna
č
ina sa konstantnim koeficijentima
Unilateralna Laplace-ova transformacija se bavi kauzalnim sistemima što je krajnje
primereno impulsnom odzivu linearnog, stacionarnog, kauzalnog sistema, i nalaženje odziva takvog
sistema za zadatu pobudu je vrlo jednostavno primenom Laplace-ove transformacije. Postupak je
ilustrovan na slede
ć
em primeru.
Primer 25.5:
Funkcija prenosa kauzalnog LTI sistema je
( )
( )
2
2
2
,
0,1 ,
2
n
n
n
n
H s
s
s
ω
ζ
ω
ζω
ω
=
∈
+
+
0
>
(25.33)
Odredimo odsko
č
ni odziv ovakvog sistema i na osnovu odziva za razli
č
ite vrednosti parametara
ζ
i
n
ω
ispitajmo njihov uticaj na odziv. Polaze
ć
i od toga da je Laplace-ova transformacija pobude
, lako nalazimo Laplace-ovu transformaciju odziva:
( )
1/
U s
s
=
( )
(
)
2
2
2
n
n
n
Y s
s s
s
ω
2
ζω
ω
=
+
+
(25.34)
Ako ovaj izraz napišemo u formi koja je zgodna za prepoznavanje tabli
č
nih transformacija:
( )
(
)
(
)
(
)
(
)
(
)
(
)
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
1
1
2
1
1
1
1
1
1
n
n
n
n
n
n
n
n
n
n
n
n
s
s
Y s
s s
s
s
s
s
s
s
s
ζω
ζω
ζω
ω
ζω
ω
ζ
ζ ω
ζω
ζ
ζ
ζω
ω
ζ
ζω
ω
ζ
+
+
= −
= −
+
+
+
+
−
−
+
= −
−
−
+
+
−
+
+
−
(25.35)
na osnovu
č
ega se jednostavno, upore
đ
ivanjem tabli
č
nih transformacija dolazi do izraza za
odsko
č
ni odziv sistema:
( )
(
)
(
)
( )
2
2
1
cos 1
sin
1
1
n
n
t
t
n
n
y t
e
t
e
t u t
ζω
ζω
ζ
ζ ω
ζ ω
ζ
−
−
⎡
⎤
= −
−
−
−
⎢
⎥
−
⎢
⎥
⎣
⎦
2
(25.36)
Poslednji izraz nam govori kolike su grani
č
ne vrednosti signala:
( )
0
0
y
=
i
( )
1
y
∞ =
i pod
pretpostavkom zadatka
( )
0,1 ,
0
n
ζ
ω
∈
>
, jasno je da sistem ima prigušen periodi
č
an odziv. Uticaj
parametara
ζ
i
n
ω
se može ilustrovati kroz slede
ć
e simulacije, prikazane na slici 25.7.
Ukoliko uporedimo odzive sistema u gornjem levom i gornjem desnom uglu slike 25.7, vidi
se da je parametar
1
n
ω
=
isti, ali se razlikuju parametri
ζ
. Ukoliko je parametar mali (gornja leva
slika) prisutan je veliki preskok u odzivu sistema i prigušenje odziva je slabo, dok se sa ve
ć
im
parametrom
ζ
prigušuje odziv sistema i automatski je i preskok manji. Otuda se parametar
ζ
naziva
faktorom relativnog prigušenja sistema
. Sa druge strane ako se pogledaju odzivi u donjem
levom i donjem desnom uglu, na njima je faktor
0.4
ζ
=
isti, dok se razlikuju paramatri
n
ω
. Za
ve
ć
u vrednost ovog parametra ( donji desni ugao) oscilacije u prigušenom odzivu su brže, njihova
frekvencija je ve
ć
a i zbog toga prelazni režim kra
ć
e traje, i obrnuto za manje vrednosti ovog
parametra (donja leva slika) u
č
estanost prigušenih oscilacija je kra
ć
a, sistem je sporiji i prelazni
režim duže traje. U grani
č
nom slu
č
aju, kada bi faktor prigušenja
ζ
težio nuli, odziv sistema bi
postao neprigušen, sistem bi zaoscilovao baš sa u
č
estanoš
ć
u
n
ω
i zbog toga se ovaj parametar
naziva
neprigušena prirodna u
č
estanost sistema.

( )
( )
' 0
' 0
y
y
−
=
. Postupak rešavanja se sastoji u tome da se na jedna
č
inu (25.63) primeni
unilateralna Laplace-ova transformacija:
( )
( )
( )
( ) ( )
(
)
( )
( ) ( )
(
2
0
' 0
4
0
3
0
3
s Y s
sy
y
sY s
y
Y s
sX s
x
X s
−
−
−
−
+
=
−
+
)
(25.39)
što postaje algebarska jedna
č
ina po nepoznatoj funkciji
( )
Y s
, koja se jednostavno rešava:
( )
( )
( )
( ) ( )
( )
2
2
0
' 0
4 0
0
3
4
3
4
3
y
s y
y
x
s
Y s
X s
s
s
s
s
+
−
−
+
=
+
−
+
−
+
(25.40)
Znaju
ć
i da je
( )
(
)
( )
2
1
3
10
,
0
5
5
s
X s
x
s
s
s s
3
+
= +
=
=
+
+
(25.41)
dobijamo
( )
( )
( )
( )
(
)
( )
( )
( )
(
)
(
)
(
)(
)
(
)
(
)
( )
( )
( )
(
)
(
)
(
)(
)
(
)(
)(
)
2
2
2
2
2
0
' 0
4 0
3
3
3
10
4
3
4
3
5
0
' 0
4 0
3
5
3 3
10
4
3
5
0
' 0
4 0
3
5
3 3
10
1
3
5
1
3
5
y
s y
y
s
s
Y s
s
s
s
s
s s
y
s y
y
s
s
s
s
s s
s
s
y
s y
y
s
s
s
s
s s
s
s
a
b
c
d
s
s
s
s
+
−
−
+
+
=
+
−
+
−
+
+
+
−
−
+
+ +
+
=
−
+
+
+
−
−
+
+ +
+
=
=
−
−
+
=
+
+
+
−
−
+
=
(25.42)
na osnovu
č
ega zaklju
č
ujemo da je rešenje diferencijalne jedna
č
ine
( )
(
)
( )
3
5
t
t
t
y t
ae
be
ce
d u t
−
=
+
+
+
(25.43)
gde su nepoznati koeficijenti:
(
) ( )
( )
( )
(
)
(
) ( )
( ) ( )
(
)
(
) ( )
( )
1
3
5
0
6
' 0
3 0
3
52
lim
1
12
24
' 0
0
3
144
lim
3
48
10
1
lim
5
240
24
30
lim
2
15
s
s
s
s
y
y
a
s
Y s
y
y
b
s
Y s
c
s
Y s
d
sY s
→
→
→−
→
−
− +
=
−
= −
−
− +
=
−
=
=
+
= −
= −
=
=
=
(25.44)
Još je potrebno dati komentar da smo u relaciji (25.41) podrazumevali
( )
( )
0
0
x
x
+
=
jer je u pitanju
kauzalni signal
( )
x t
.
Zadaci za samostalni rad:
1.
Za slede
ć
e signale odrediti dvostranu Laplace-ovu transformaciju, skicirajte njihove nule i polove
u kompleksnoj
s
ravni i ozna
č
ite oblast konvergencije:
a)
( )
( )
8
t
x t
e u t
−
=
; b)
( )
(
) ( )
3
cos 20
t
x t
e
t u t
π
=
−
; c)
( )
( )
( )
2
5
t
t
x t
e u t
e u t
−
=
− −
.
2.
Znaju
ć
i osobine Laplace-ove transformacije odrediti kauzalni signal
( )
x t
č
iji je transformacioni
par
( ) (
)
(
)
1
1
4
3
4
3
X s
s
j
s
j
=
+
+
+
−
+
.
3.
Polaze
ć
i od osobina Laplace-ove transformacije, odrediti transformacione parove slede
ć
ih
signala:
a)
( )
( )
4
x t
t
δ
=
; b)
( ) ( )
4
x t
u t
=
; c)
( )
( )
du t
x t
dt
=
; d)
( )
( )
(
)
10
t
d
x t
e
u
dt
−
=
t
;
e)
( )
(
) ( )
(
)
4sin 10
d
x t
t
dt
π
=
u t
; f)
( )
( ) ( )
*
t
x t
e u t u t
−
=
; g)
( )
(
) ( ) ( )
sin 20
*
t
x t
e
t u t u t
π
−
=
;
g)
.
( )
(
) ( )
( ) (
)
8cos 2
*
1
x t
t u t
u t
u t
π
=
−
⎡
⎤
⎣
⎦
−
4.
Koriste
ć
i se grani
č
nim teoremama jednostrane Laplace-ove transformacije odrediti grani
č
ne
vrednosti
( )
0
x
i
kauzalnih signala
č
iji su transformacioni parovi dati:
( )
x
∞
a)
( )
10
8
X s
s
=
+
; b)
( )
(
)
2
3
3
4
s
X s
s
+
=
+
+
; c)
( )
2
4
s
X s
s
=
+
; d)
( )
2
10
10
300
s
X s
s
s
=
+
+
;
e)
( ) (
)
8
20
X s
s s
=
+
; f)
( )
(
)
2
8
20
X s
s s
=
+
5.
Za kauzalne signale
č
iji su transformacioni parovi dati, odrediti njihov vremenski oblik:
a)
( ) ( )
24
8
X s
s s
=
+
; b)
( )
2
20
4
3
X s
s
s
=
+
+
; c)
( )
2
5
6
73
X s
s
s
=
+
+
; d)
( )
(
)
2
10
6
73
X s
s s
s
=
+
+
;
e)
( )
(
)
2
2
4
6
73
X s
s s
s
=
+
+
; f)
( )
2
2
2
13
s
X s
s
s
=
+
+
; g)
( )
3
s
X s
s
=
+
; h)
( )
2
4
4
s
X s
s
s
=
+
+
;
i)
( )
2
2
4
4
s
X s
s
s
=
−
+
; j)
( )
4
2
10
4
4
s
X s
s
s
=
+
+
i za svaku od ovih kompleksnih funkcija odrediti oblast konvergencije u
s
ravni.
6.
Za sistem
č
iji je strukturni blok dijagram prikazan na slici
( )
1
H s
( )
2
H s
( )
3
H s
+
( )
x t
+
+
−
−
+
( )
y t
odrediti ekvivalentnu funkciju prenosa sistema. Ako se zna da je
( )
(
)
1
1/
1
H s
s
=
+
,
i
,
ispitati za koje vrednosti parametra
K
je sistem stabilan.
( )
(
)
2
3/
6
H s
s
=
+
( )
3
H s
K
=
7.
Za kauzalne LTI sisteme
č
ije su funkcije prenosa date ispitati BIBO stabilnost:
a)
( )
2
4
2
4
s
H s
s
s
=
+
+
; b)
( )
(
)
2
2
1
H s
s s
=
+
; c)
( )
(
)
2
1
1
1
H s
Ks
K s
=
+ −
+
; d)
( )
2
2
1
2
s
H s
s
s K
+
=
−
+

Pitanje 26: Zed transformacija i inverzna zed transformacija
U ovom predavanju
ć
emo se baviti diskretnim signalima, diskretnim sistemima i
transformacijom koja u svetlu diskretnih signala i sistema zauzima jednako važno mesto kakvo
zauzima Laplace-ova transformacija u svetu kontinualnih signala i sistema.
Pojam sopstvenih funkcija i sopstvenih vrednosti možemo definisati na potpuno analogan
na
č
in za linearne, vremenski nepromenljive diskretne sisteme, kao što smo to uradili i za LTI
kontinualne sisteme. Pretpostavimo da je ulazni signal nekog diskretnog LTI sistema
[ ]
x n
mogu
ć
e
napisati u obliku linearne kombinacije bazisa funkcija
[ ]
k
n
φ
[ ]
[ ]
k k
k
x n
a
φ
=
∑
n
(26.1)
Tada se odziv sistema može napisati u sli
č
noj formi
(26.2)
[ ]
[ ]
k
k
k
y n
a
n
ψ
=
∑
gde je sa
[ ]
k
n
ψ
ozna
č
en odziv sistema na pobudu
[ ]
k
n
φ
:
[ ] [ ]
[ ]
*
k
k
n
n h n
ψ
φ
=
(26.3)
U specijalnom slu
č
aju, kada signali
k
φ
i
k
ψ
imaju istu formu:
[ ]
[ ]
k
k k
n
b
n
ψ
φ
=
(26.4)
gde je konstanta, za funkciju
k
b
[ ]
k
n
φ
se kaže da je sopstvena funkcija LTI sistema sa
odgovaraju
ć
om sopstvenom vrednoš
ć
u
. Po analogiji sa kontinualnim sistemima, lako se
dokazuje da kompleksna eksponencijalna funkcija
k
b
[ ]
n
k
n
z
φ
k
=
(26.5)
za proizvoljnu kompleksnu konstantu , jeste sopstvena funkcija svakog LTI sistema. Ukoliko
posmatramo samo jednu od funkcija iz bazisa
k
z
[ ]
n
n
z
φ
=
(26.6)
odziv sistema na ovakvu pobudu postaje
[ ] [ ] [ ]
[
]
[ ]
[ ]
( )
*
k
n k
n
k
k
k
k
n
n h n
z h n k
h k z
z
h k z
H z z
n
ψ
φ
∞
∞
∞
−
−
=−∞
=−∞
=−∞
=
=
−
=
=
=
∑
∑
∑
(26.7)
Dakle, signal
[ ]
n
n
z
φ
=
jeste sopstvena funkcija bilo kog LTI diskretnog sistema, za bilo koju
kompleksnu vrednost
z
, pri
č
emu je odgovaraju
ć
a sopstvena vrednost
( )
[ ]
k
k
H z
h k z
∞
−
=−∞
=
∑
(26.8)
Poslednja relacija (26.8) definiše zed transformaciju impulsnog odziva
[ ]
h n
. Sli
č
no tome, za bilo
koji diskretni signal
[ ]
x n
, odgovaraju
ć
a zed transformacija se definiše na identi
č
an na
č
in:
( )
[ ]
n
n
X z
x n
∞
z
−
=−∞
=
∑
(26.9)
Sli
č
no kao kod Laplace-ove transformacije i zed transformacija konvergira samo za odre
đ
eni skup
kompleksnih varijabli
z
i geometrijsko mesto ta
č
aka za koje je uslov konvergencije zadovoljen se
naziva
oblaš
ć
u konvergencije zed transformacije
(u engleskoj literaturi obi
č
no obeležavan kao ROC
ili Region Of Convergence).
Primer 26.1:
Posmatrajmo kauzalni eksponencijalni signal
[ ]
[ ]
n
x n
a u n
=
(26.10)
Odgovaraju
ć
a zed transformacija glasi
(26.11)
( )
[ ]
( )
1
0
0
n
n
n
n
n
n
n
n
X z
a u n z
a z
az
∞
∞
∞
−
−
=−∞
=
=
=
=
=
∑
∑
∑
−
O
č
igledno je u pitanju geometrijski red koji konvergira samo pod uslovom da je moduo koeficijenta
reda manji od 1, odnosno da je
1
1
az
−
<
, što je ekvivalentno uslovu
z
a
>
. Ukoliko je ovaj uslov
zadovoljen, signal
( )
X z
postaje
( )
1
1
;
1
z
X z
az
z a
−
z
a
=
=
−
−
>
(26.12)
Dobijena funkcija
( )
X z
se ponovo može napisati (kao i kod Laplace-ove transformacije) u obliku
koli
č
nika dva polinoma, koji definišu nule i polove dobijene funkcije. Informacija o zed
transformaciji je potpuna (do multiplikativne konstante) ukoliko se definiše položaj nula i polova
zajedno sa oblaš
ć
u konvergencije funkcije. Otuda je uobi
č
ajen na
č
in da se ove informacije prikažu
grafi
č
ki u
z
ravni, pri
č
emu se koristi oznaka za poziciju polova i oznaka za poziciju nula.
Ova funkcija ima jedan pol u ta
č
ki
'x'
'o'
z a
=
i jednu nulu
0
z
=
. Na slici 26.1 je prikazano
č
etiri
slu
č
aja, zavisno od vrednosti parametra
a
. Primetimo da grani
č
ne vrednosti
i
1
a
=
1
a
= −
odgovaraju slu
č
ajevima
[ ] [ ]
x n
u n
=
i
[ ]
( )
[ ]
1
n
x n
u
= −
n
, respektivno. Što nas dovodi do rezultata
da je
[ ]
1
1
;
1
1
z
u n
z
z
z
−
1
↔
=
>
−
−
(26.13)
i
( )
[ ]
1
1
1
1
1
n
z
u n
z
z
z
−
−
↔
=
+
+
;
1
>
(26.14)
Uobi
č
ajena notacija kojom se kaže da diskretni signal
[ ]
x n
i funkcija
( )
X z
č
ine transformacioni
par zed transformacije je slede
ć
a
( )
[ ]
{
}
X z
x
=
Z
n
(26.15)
ili
[ ]
( )
{
}
1
x n
X
−
=
Z
z
(26.16)
pri
č
emu
ć
e izraz za inverznu zed transformaciju kojom se odbirci signala
[ ]
x n
mogu sra
č
unati na
osnovu funkcije
biti definisan kasnije.
( )
X z

( )
;
z
X z
z
z a
a
=
<
−
(26.20)
Oblast konvergencije sa položajem nula i polova za razli
č
ite vrednosti parametra
a
je prikazana na
slici 26.2.
{ }
Re
z
{ }
Im
z
a
1
(
)
0
1
a
< <
{ }
Re
z
{ }
Im
z
(
)
1
a
>
a
1
{ }
Re
z
{ }
Im
z
a
1
−
(
)
1
0
a
− < <
{ }
Re
z
{ }
Im
z
a
1
−
(
)
1
a
< −
Slika 26.2: Lokacija nula i polova i oblast konvergencije signala
[
]
1
n
a u n
−
− −
Primetimo da je zed transformacija ovog signala identi
č
na zed transformaciji signala
[ ]
n
a u n
iz
prethodnog primera, i jedina razlika je u oblasti konvergencije. O
č
igledno da možemo izvesti sli
č
an
zaklju
č
ak o vezi izme
đ
u konvergencije zed transformacije i obliku signala u vremenskom domenu,
kakav smo izveli u domenu Laplace-ove transformacije. Ukoliko je signal kauzalan oblast
konvergencije je oblika
z
r
>
i obrnuto, ukoliko je oblast konvergencije oblika
z
r
>
tada je
signal ograni
č
en sa leve strane, odnosno postoji tako da je
0
n
(
)
0
n n
∀ <
[ ]
0
x n
=
. Tako
đ
e, ukoliko
je signal antikauzalan tada je oblast konvergencije njegove zed transformacije u obliku
z
r
<
i
obrnuto, ukoliko je oblast konvergencije forme
z
r
<
, tada je signal ograni
č
en sa leve strane,
odnosno postoji tako da je
(
0
n
)
0
n n
∀ ≥
[ ]
0
x n
=
.
Primer 26.3:
Zed transformacija jedini
č
nog impulsnog signala
[ ]
n
δ
se jednostavno sra
č
unava:
[ ]
{
}
[ ]
[ ]
0
0
k
k
n
k z
z
δ
δ
δ
∞
−
=−∞
1
=
=
∑
Z
=
(26.21)
O
č
igledno da zed transformacija jedini
č
nog diskretnog impulsa konvergira za svako
z
, i to
ć
e biti
karakteristika svih signala koji imaju ograni
č
eno trajanje.
Inverzna zed transformacija
Postoji
nekoliko
razli
č
itih na
č
ina kako se iz funkcije
( )
X z
mogu rekonstruisati vrednosti
odbiraka signala
[ ]
x n
. Prvi od njih je, svakako teorijski vrlo zna
č
ajan, me
đ
utim prakti
č
no
č
esto
nepodesan i komplikovan a zasniva se na Cauchy-jevom integralu i teoriji kompleksne promenljive
i dat je slede
ć
om relacijom:
[ ]
( )
1
1
2
n
x n
X z z
j
π
−
Γ
=
∫
v
dz
(26.22)
gde je sa
Γ
ozna
č
ena kontura koja leži u oblasti konvergencije funkcije
( )
X z
i koju treba obilaziti
u smeru kazaljke na satu.
Mnogo jednostavniji na
č
in odre
đ
ivanje odbiraka signala na osnovu zed transformacije se
sastoji u razvoju funkcije
( )
X z
u potencijalni red. Naime, ako se ova funkcija napiše u formi
koli
č
nika dva polinoma
( )
( )
( )
B z
X z
A z
=
(26.23)
deljenjem polinoma
B
polinomom
A
dobija se potencijalni red oblika
( )
[ ]
( )
( )
1
2
2
0
1
1
2
2
...
k
k
B z
X z
x k z
a
a z a z
a z
a z
A z
∞
−
−
−
−
=−∞
=
=
=
+
+
+
+
∑
−
+
(26.24)
gde se upore
đ
ivanjem koeficijenata redova na levo j i desnoj strani jednakosti dolazi do zaklju
č
ka
da koeficijent razvoji koji stoji uz
č
lan
zapravo predstavlja vrednost odbirka
k
z
[ ]
x k
−
. Pri tome,
oblast konvergencije funkcije
( )
X z
nam govori o tome kakva je priroda signala u vremenu (je li
ograni
č
en sa leve ili desne strane, je li kona
č
nog trajanja ili je neograni
č
en) pa u tome smislu
možemo znati kakav razvoj tražimo.
Primer 26.4:
Data je zed transformacija
( )
1
1
;
1 2
X z
z
z
−
2
=
>
−
(26.25)
O
č
igledno je u pitanju signal koji je ograni
č
en sa leve strane, i deljenjem polinoma dobijamo
slede
ć
i rezultat:

Pitanje 27: Osobine zed transformacije
Kao i u slu
č
aju Fourier-ove i Laplace-ove transformacije, i za zed transformaciju postoji
č
itav niz osobina koje su od izuzetnog zna
č
aja sa stanovišta obrade signala i analize sistema.
Svakako jedna od važnijih jeste da je ovo linearna transformacija:
linearnost
zed transformacije se definiše kroz slede
ć
u implikaciju
[ ]
{
}
( )
[ ]
{
}
( )
[ ]
[ ]
{
}
( )
( )
1
1
2
2
1 1
2 2
1
1
2
2
,
x n
X z
x n
X z
a x n
a x n
a X z
a X z
=
=
⇒
+
=
+
Z
Z
Z
(27.1)
pri
č
emu se mora naglasiti da je oblast konvergencije funkcije
( )
(
1
1
2
2
a X z
a X z
+
)
jednaka preseku
oblasti konvergencija signala
i
( )
1
X z
( )
2
X z
pomeranje u vremenu
Pretpostavimo da su signal
[ ]
x n
i funkcija
( )
X z
transformacioni par. Postavlja se pitanje
šte
ć
e biti transformacioni par signala
[
]
0
x n n
−
koji je pomeren u vremenu za odbiraka. Do
rezulatata se jednostavno dolazi primenom definicionog izraza za zed transformaciju:
0
n
[
]
{
}
[
]
[ ]
[ ]
( )
0
0
0
0
0
k n
n
n
n
k
n
k
k
x n n
x n n z
x k z
z
x k z
z
X z
∞
∞
∞
− −
−
−
−
−
=−∞
=−∞
=−∞
−
=
−
=
=
=
∑
∑
∑
Z
(27.2)
što za specijalne slu
č
ajeve dovodi do rezultata
[
]
( )
[
]
( )
1
1
1
x n
z X z
x n
zX z
−
− ↔
+ ↔
(27.3)
Drugim re
č
ima, zakasniti signal za jedan period odabiranja u zed domenu zna
č
i pomnožiti funkciju
( )
X z
sa
. Zbog toga se
č
esto
ozna
č
ava kao operator jedini
č
nog kašnjenja. Iz istog razloga
se
č
esto kompleksna promenljiva
z
ozna
č
ava kao operator jedini
č
nog prednja
č
enja. Primetimo još
da, zavisno od vrednosti parametra , signal
1
z
−
1
z
−
0
n
[
]
0
x n n
−
ne mora biti kauzalan (antikauzalan) iako je
signal
[ ]
x n
bio kauzalan (antikauzalan).
modulacija
Pretpostavimo da su signali
[ ]
x n
i
( )
X z
transformacioni par. Osobina modulacije tvrdi da
je zed transformaciju signala
[ ]
0
n
z x n
jednostavno dobiti na slede
ć
i na
č
in:
[ ]
{
}
[ ]
[ ]
0
0
0
0
k
n
k
k
k
k
z
z x n
z x k z
x k
X
z
z
−
∞
∞
−
=−∞
=−∞
⎛
⎞
⎛
⎞
=
=
=
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
∑
∑
Z
z
(27.4)
odnosno
[ ]
0
0
n
z
z x n
X
z
⎛
⎞
↔
⎜
⎟
⎝
⎠
(27.5)
pri
č
emu se i oblast konvergencije signala
[ ]
0
n
z x n
'
R
dobija na osnovu oblasti konvergencije
R
originalnog signala
[ ]
x n
:
0
'
R
z R
=
(27.6)
Potpuno analogno dobijenom rezultatu, u slu
č
aju kompleksne modulacije signala dobija se slede
ć
i
rezultat:
[ ]
(
)
0
0
,
'
j
n
j
e
x n
X ze
R
R
Ω
− Ω
↔
=
(27.7)
inverzija vremena
Ukoliko umesto signala
[ ]
x n
posmatramo njegovu refleksiju u vremenu
[ ]
x n
−
,
odgovaraju
ć
a zed transformacija postaje:
[ ]
{
}
[ ]
[ ]
[ ]
( )
(
1
k
k
k
k
k
k
)
1
x n
x k z
x k z
x k z
X z
∞
∞
∞
−
−
−
=−∞
=−∞
=−∞
−
=
−
=
=
=
∑
∑
∑
Z
−
(27.8)
odnosno
[ ]
( )
1/
,
' 1/
x n
X
z
R
−
↔
=
R
(27.9)
konvolucija signala
Pretpostavimo da se signal
[ ]
y n
dobija kao konvolucija signala
[ ]
x n
i
[ ]
h n
. Tada se zed
transformacija signala
y
može dobiti kao proizvod zed transformacija signala
x
i
h
. Ovo se tvr
đ
enje
jednostavno dokazuje:
(27.10)
( )
[ ]
[ ] [
]
[ ]
[
]
(
)
[ ]
[ ]
[ ]
( )
( ) ( )
k m
k
k
m
k
k
m
m
k
m
r
m
m
r
m
Y z
y k z
x m h k m z
x m z
h k m z
x m z
h r z
x m z H z
H z X z
∞
∞
∞
∞
∞
− −
−
−
−
=−∞
=−∞ =−∞
=−∞
=−∞
∞
∞
∞
−
−
−
=−∞
=−∞
=−∞
=
=
−
=
−
=
=
=
∑
∑ ∑
∑
∑
∑
∑
∑
U poslednjoj relaciji su iskoriš
ć
ene
č
injenice, da sumatori mogu zameniti mesta, da se
č
lan
k
z
−
može napisati kao
(
)
k m
m
z z
− −
−
i na kraju je izvršena smena promenljivih
. Pri tome važi
relacija:
r k m
= −
y
h
x
R
R
R
=
∩
(27.11)
odnosno oblast konvergencije funkcije
( )
Y z
se dobija kao presek oblasti konvergencija funkcija
i
.
( )
H z
( )
X z
Sli
č
no kao kod Laplace-ove transformacije, može se formirati tabela zed transformacija
elementarnih diskretnih signala.

( )
H z
[ ]
y n
[ ]
x n
Slika 28.1: Šematska oznaka diskretnog sistema opisanog funkcijom diskretnog prenosa
Tada je jednostavno uspostaviti vezu izme
đ
u ulaznog i izlaznog signala:
( )
( ) ( )
,
y
h
Y z
H z X z
R
R
R
=
=
x
∩
(28.2)
Postoji nekoliko,
č
esto koriš
ć
enih, jednostavnih diskretnih sistema, kao što su jedini
č
no kašnjenje
(
unit delay
), jedini
č
no prednja
č
enje (
unit advance
) i akumulator. Njihovi impulsni odzivi i
odgovaraju
ć
e funkcije prenosa su:
jedini
č
no kašnjenje:
[ ] [
]
1
h n
n
δ
=
−
,
( )
1
H z
z
−
=
,
0
z
>
jedini
č
no prednja
č
enje:
[ ] [
]
1
h n
n
δ
=
+
,
( )
,
H z
z
z
=
< ∞
akumulator:
,
[ ]
[ ]
n
k
h n
k
δ
=−∞
=
∑
( )
1
1
,
1
1
H z
z
z
−
=
>
−
.
Primer 28.1:
Impulsni odziv diskretnog sistema je
[ ]
[ ]
0.5
n
h n
u n
=
(28.3)
Ako se na ulaz ovakvog sistema dovede signal
[ ]
[ ]
[ ]
2
0.5
n
n
x n
u n
u
−
n
=
− =
−
(28.4)
lako možemo odrediti odziv takvog sistema, primenjuju
ć
i zed transformaciju:
( )
[ ]
(
)
1
1
0
0
1
0.5
0.5
,
0.5
1 0.5
k
k
k
k
k
k
k
H z
h k z
z
z
z
z
∞
∞
∞
−
−
−
−
=−∞
=
=
=
=
=
=
−
∑
∑
∑
>
(28.5)
( )
[ ]
1
0
1
0
1
2
2
2
,
1 0.5
1 2
k
k
k
k
k
k
k
k
z
X z
x k z
z
z
z
z
z
−
∞
∞
−
−
−
−
=−∞
=−∞
=
−
=
=
=
=
=
−
−
∑
∑
∑
2
<
(28.6)
Kona
č
no, zed transformacija izlaznog signala postaje:
( )
(
)(
)
1
1
1
2
, 0.5
2
1 0.5
1 2
z
Y z
z
z
z
−
−
−
= −
<
<
−
−
(28.7)
U želji da na osnovu dobijene zed transformacije odredimo vremenski oblik signala
[ ]
y n
, možemo
rešavati integral kojim je definisana inverzna zed transformacija, me
đ
utim, možemo izraz (28.7)
napisati u obliku parcijalnih razlomaka i na osnovu njih, jednostavno prepoznati pojedine
č
lanove iz
tabele zed transformacija elementarnih signala:
( )
1
1
, 0.5
2
1 0.5
1 2
a
b
Y z
z
z
z
−
−
=
+
<
−
−
<
(28.8)
gde se parametri
a
i
b
odre
đ
uju na osnovu relacija:
(
)
( )
(
)
( )
1
0.5
1
2
lim 1 0.5
4 / 3
lim 1 2
4 / 3
z
z
a
z
Y z
b
z
Y z
−
→
−
→
=
−
=
=
−
= −
(28.9)
Kona
č
no, prvi
č
lan u relaciji (28.8) odgovara tabli
č
nom kauzalnom signalu (jer je oblast
konvergencije oblika
0.5
z
>
), dok drugi
č
lan odgovara tabli
č
nom antikauzalnom signalu (jer je
oblast konvergencije oblika
2
z
<
), pa onda možemo pisati:
[ ]
[ ]
[
4
4
0.5
2
1
3
3
n
n
y n
u n
u n
=
+
−
]
−
(28.10)
Frekvencijski odziv diskretnog sistema
Ukoliko na ulaz diskretnog sistema dovedemo kompleksnu diskretnu sinusoidu
[ ]
j n
x n
e
Ω
=
(28.11)
proizvoljne u
č
estanosti , jednostavno se primenom konvolucije dobija odziv sistema
Ω
[ ] [ ] [ ]
( )
*
j
j
y n
x n h n
H e
e
n
Ω
Ω
=
=
(28.12)
što je znak da
ć
e i odziv sistema biti kompleksna sinusoida iste u
č
estanosti, s tim što je pomnožena
kompleksnim brojem
( )
j
H e
Ω
:
( )
[ ]
j
k
H e
h k e
∞
j k
Ω
− Ω
=−∞
=
∑
(28.13)
Ukoliko poslednja suma konvergira, ona se naziva
frekvencijskim odzivom diskretnog sistema za
u
č
estanost , jer nam ona govori šta se dešava sa amplitudom i fazom kompleksne sinusoide koja
propagira kroz zadati LTI sistem. Sli
č
no kao što smo frekvencijski odziv analizirali kod
kontinualnih sistema, i kod diskretnih sistema se analizira posebno amplituda i posebno faza
frekvencijskog odziva, i za sisteme
č
iji je impulsni odziv realna funkcija, važe slede
ć
e dve relacije:
Ω
( )
( )
j
H e
H e
Ω
−
=
j
Ω
(28.14)
što zna
č
i da je amplitudska frekvencijska karakteristika diskretnog sistema parna funkcija, i
( )
{
}
( )
{
}
arg
arg
j
H e
H e
Ω
= −
j
− Ω
(28.15)
što ozna
č
ava da je fazna karakteristika neparna funkcija u
č
estanosti
Ω
. Dakle, rezultati su identi
č
ni
onima do kojih smo došli za kontinualne sisteme.
Kauzalnost i stabilnost sistema
Na osnovu tabele zed transformacija elementarnih diskretnih signala, kao i na osnovu
primera koji su dosada ilustrovali osnovne osobine zed transformacije, možemo zaklju
č
iti da su
kauzalni signali ili kauzalni sistemi (sistemi su kauzalni ako je njihov impulsni odziv kauzalni
signal) prepoznatljivi po tome da je njihova oblast konvergencije oblika
max
z
r
>
(28.16)
dok se za antikauzalne signale ili antikauzalne sisteme oblast konvergencije pojavljuje u formi
min
z
r
<
(28.17)
Tako
đ
e se može zaklju
č
iti da ukoliko neki signal ili funkcija prenosa sistema imaju oblast
konvergencije oblika

1
max
r
Slika 28.2: Grafi
č
ki prikaz stabilnog kauzalnog sistem
Na osnovu poslednje slike možemo zaklju
č
iti da
, predstavlja maksimalni moduo svih polova
funkcije
, kako je za stabilnost važno da jedini
č
ni krug pripada oblasti konvergencije,
jednostavno dolazimo do slede
ć
eg potrebno i dovoljnog uslova stabilnosti diskretnog sistema:
max
r
( )
H z
Potreban i dovoljan uslov da diskretni LTI sistem bude stabilan jeste da svi polovi funkcije
diskretnog prenosa budu unutar jedini
č
nog kruga, odnosno da moduo svakog od polova bude
manji od 1
.
Primer 28.2:
Strukturni blok dijagram diskretnog sistema je prikazan na slici 28.3.
[ ]
x n
[ ]
y n
+
−
+
−
( )
1
H z
( )
2
H z
( )
3
H z
( )
4
H z
+
+
+
−
Slika 28.3: Strukturni blok dijagram sistema
Pravila kojima se dati strukturni blok dijagram može transformisati i pojednostaviti, su identi
č
na
pravilima algebre funkcije prenosa koju smo naveli za kontinualne sisteme. Primenom tre
ć
eg
pravila, blokovi sa zatvorenom povratnom spregom se mogu zameniti jednom funkcijom prenosa, i
pojednostavljeni strukturni blok dijagram je dat na slici 28.4.
[ ]
x n
[ ]
y n
+
−
+
( )
1
H z
( )
'
2
H z
( )
3
H z
( )
'
4
H z
+
+
Slika 28.4: Modifikovani strukturni blok dijagram
Novouvedene funkcije diskretnog prenosa su:
( )
( )
( )
( )
( )
( )
2
'
'
2
4
2
4
,
1
1
H z
H z
H z
H z
H z
H z
=
=
+
+
4
(28.23)
Dalje se jednostavno može prepoznati da su blokovi funkcija prenosa
i
vezani u
paralelu, a na red sa blokom funkcije diskretnog prenosa
( )
1
H z
( )
'
2
H z
( )
3
H z
, pa je slede
ć
i pojednostavljeni
strukturni blok dijagram dat na slici 28.5.
[ ]
x n
[ ]
y n
+
−
( )
123
H
z
( )
'
4
H z
Slika 28.5: Modifikovani strukturni blok dijagram sistema
pri
č
emu je
( )
( )
( )
( )
'
123
1
2
3
H
z
H z
H z H z
⎡
⎤
=
+
⎣
⎦
(28.24)
Kona
č
no, funkcija diskretnog prenosa celog sistema postaje
( )
( )
( )
( )
( ) ( )
123
'
123
4
1
Y z
H
z
H z
X z
H
z
=
=
+
H z
(28.25)
Ako pretpostavimo slede
ć
e konkretne vrednosti za pojedine funkcije diskretnog prenosa:
( )
( )
( )
( )
1
2
1
1
3
4
1
1
1
,
0.5 ;
;
0
1 0.5
1 0.2
1
1 ;
,
1
1
H z
z
H z
z
z
H z
H z
z
z
−
−
−
=
>
=
−
−
=
=
>
−
.2
z
>
(28.26)
mogu
ć
e je odrediti ekvivalentnu funkciju diskretnog prenosa
( )
H z
, na slede
ć
i na
č
in:
( )
( )
( )
2
'
2
1
1
2
1
0.5
,
0
1
2 0.2
1 0.1
H z
H z
z
H z
z
z
−
−
=
=
=
+
−
−
.1
>
(28.27)
( )
( )
( )
4
'
4
1
1
4
1
0.5
;
0
1
2
1 0.5
H z
H z
z
H z
z
z
−
−
=
=
=
+
−
−
.5
>
(28.28)

Prednost unilateralne zed transformacije nad bilateralnom je ta, što u ovom slu
č
aju nije neophodno
pisati oblast konvergencije. Podrazumeva se da je oblast konvergencije oblika
max
z
r
>
gde je sa
polupre
č
nik minimalnog kruga sa centrom u koordinatnom po
č
etku koji obuhvata sve polove
funkcije
. Sli
č
no kao i kod jednostrane Laplace-ove transformacije, sve osobine koje smo
naveli za dvostranu zed transformaciju važe i za jednostranu, sa jednom razlikom, a to je zed
transformacija signala koji prednja
č
i u vremenu. Naime, pretpostavimo da nam je poznata zed
transformacija
kauzalnog signala
max
r
( )
X z
( )
X z
[ ]
x n
i da sada želimo da na
đ
emo zed transformaciju
kauzalnog signala
[
]
1
x n
+
:
[
]
{
}
[ ]
[ ]
[ ]
[ ] [ ]
[ ]
{
}
[ ]
( )
[ ]
0
1
2
1
2
1
1
2
3
0
1
2
0
0
x n
x
z
x
z
x
z
z x
x
z
x
z
zx
zX z
zx
−
−
−
−
+
=
+
+
+
=
=
+
+
+
−
=
−
Z
"
"
(28.37)
odnosno
[
]
( )
[ ]
1
0
x n
zX z
z
+
↔
−
x
(28.38)
Potpuno analogno ovom dokazu, lako se sra
č
unava zed transformacija signala koji prednja
č
i više
odbiraka:
[
]
( )
[ ]
[ ]
[
]
0
0
0
1
0
0
0
1
n
n
n
x n n
z X z
z x
z
x
zx n
−
1
+
↔
−
−
− −
"
−
(28.39)
Tako
đ
e, kao i kod unilateralne Laplace-ove transformacije, postoje dve grani
č
ne teoreme
jednostrane zed transformacije, koje kažu da se na osnovu funkcije
mogu odrediti dve
grani
č
ne vrednosti signala u vremenu
( )
X z
[ ]
0
x
i
[ ]
x
∞
.
Prva grani
č
na teorema unilateralne zed transformacije
Polaze
ć
i od pretpostavke da su
[ ]
x n
i
( )
X z
transformacioni par zed transformaicje, možemo
pisati:
( )
[ ]
{ }
[ ] [ ]
[ ]
1
2
0
1
2
X z
x n
x
x
z
x
z
−
−
=
=
+
+
Z
"
+
(28.40)
O
č
igledno je da, ako u navedenom izrazu pustimo grani
č
ni proces u kome kompleksna promenljiva
z
teži ka
∞
, da
ć
e nestati svi sabirci na desnoj strani relacije (28.40) osim poslednjeg:
[ ]
( )
0
lim
z
x
X z
→∞
=
(28.41)
Poslednji izraz definiše takozvanu prvu grani
č
nu teoremu zed transformacije.
Druga grani
č
na teorema unilateralne zed transformacije.
Pretpostavimo da na osnovu kauzalnog signala
[ ]
x n
generišemo pomo
ć
ni signal
[ ]
k
x n
na slede
ć
i
na
č
in:
[ ]
[ ]
,
0 ,
k
x n
n k
x n
n k
⎧
≤
⎪
= ⎨
>
⎪⎩
(28.42)
Odgovaraju
ć
i transformacioni par ovog signala je
( )
[ ]
[ ]
[ ] [ ]
[ ]
1
0
0
0
1
k
n
n
k
k
n
n
k
X z
x n z
x n z
x
x
z
x k z
∞
−
−
−
=
=
=
=
=
+
+
∑
∑
"
−
(28.43)
Sada posmatrajmo signal
[ ]
k
x n
koji je definisan na slede
ć
i na
č
in:
[ ]
[
]
0 ;
0
1 ; 1
0 ;
k
n
x n
x n
n
n k
=
⎧
⎪
k
=
−
≤ ≤
⎨
⎪
>
⎩
(28.44)
i njemu odgovaraju
ć
u zed transformaciju
( )
[ ]
[ ]
[
]
1
2
0
1
1
k
k
X z
x
z
x
z
x k
z
−
−
=
+
+ +
−
"
−
(28.45)
O
č
igledno je na osnovu izraza (28.43) i (28.45) da je vrednost signala
[ ]
x k
mogu
ć
e dobiti na
slede
ć
i na
č
in:
[ ]
( )
( )
(
)
1
lim
k
k
z
x k
X z
X
→
=
−
z
(28.46)
a sada na dobijeni izraz pustimo grani
č
ni proces u kome
k
teži
∞
:
[ ]
[ ]
( )
( )
(
)
1
lim
lim lim
k
k
k
k
z
x
x k
X z
X z
→∞
→∞ →
∞ =
=
−
(28.47)
Ukoliko limesi zamene mesta dobijamo
[ ]
( )
( )
(
)
(
)
( )
1
1
1
lim lim
lim 1
k
k
z
k
z
x
X z
X z
z
X z
−
→
→∞
→
∞ =
−
=
−
(28.48)
jer je
[ ] [ ]
[ ] [
]
lim
, lim
1
k
k
k
k
x n
x n
x n
x n
→∞
→∞
=
=
−
(28.49)
pa je
( )
( )
( )
( )
1
lim
, lim
k
k
k
k
X z
X z
X z
z X z
−
→∞
→∞
=
=
(28.50)
Relacija (28.48) se naziva drugom grani
č
nom teoremom zed transformacije, i ponovo je neophodno
dati napomenu da je ova teorema primenjiva samo pod uslovom da svi polovi funkcije
( )
X z
leže
unutar jedini
č
nog kruga
z
ravni.
Kao što je Laplace-ova transformacija vrlo pogodan alat za rešavanje linearnih
diferencijalnih jedna
č
ina sa konstantnim koeficijentima, tako se linearne diferencne jedna
č
ine sa
konstantnim koeficijentima jednostavno rešavaju primenom zed transformacije. Ovu tehniku
možemo ilustrovati slede
ć
im primerom.
Primer 28.4:
Neka je data diferencna jedna
č
ina sa konstantnim koeficijentima:
[
]
[
]
[ ] [
] [ ]
2
0.8
1 0.15
1
y n
y n
y n
x n
x n
+ −
+ +
=
+ −
(28.51)
pri
č
emu je signal
[ ]
(
)
[ ]
1 0.5
n
x n
= −
u n
(28.52)
Ukoliko na relaciju (28.51) primenimo unilateralnu zed transformaciju dobi
ć
emo algebarsku
jedna
č
inu po funkciji
:
( )
Y z

Pitanje 28: Diskretna Fourier-ova transformacija
Videli smo u prethodnim predavanjima u kojoj meri je frekvencijska analiza signala korisna
sa aspekta analize i filtracije signala. Pri tome je klju
č
ni rezultat sadržan u Fourier-ovoj
transformacij prilago
đ
en isklju
č
ivo kontinualnim signalima. Otuda se postavlja pitanje, da li je
mogu
ć
e sli
č
nu ili odgovaraju
ć
u transformaciju razviti i za diskretne signale, i na taj na
č
in ovakvu
transformaciju prilagoditi ra
č
unarima koji su u stanju da operišu samo sa diskretnim nizom brojeva.
Sa takvom namerom nastala je transformacija koja se naziva
Diskretna Fourier-ova
Transformacija,
i koja se u literaturi
č
esto ozna
č
ava kao DFT. Ovu
ć
emo transformaciju izložiti u
nekoliko koraka, polaze
ć
i od dobro poznate Fourier-ove transformacije koja je razvijena za
kontinualne signale.
Dakle, pretpostavimo da nam je na raspolaganju jedan kontinualni signal
( )
x t
definisan za
svako
, i da smo alatom koji nam je dobro poznat, dakle primenom analiti
č
ke relacije
Fourier-ove transformacije, odredili njegov Fourier-ov transformacioni par
t R
∈
(
X j
)
ω
. Dalje
pretpostavimo da je signal
( )
x t
realni signal, što nije neko veliko ograni
č
enje, s obzirom da se u
tehnici uglavnom i bavimo realnim signalima, te otuda znamo da
ć
e moduo funkcije
( )
X j
ω
biti
parna funkcija u
č
estanosti
ω
, a argument neparna funkcija:
( )
(
)
X j
X
j
ω
ω
=
−
(28.1)
( )
{
}
(
)
{
}
arg
arg
X j
X
j
ω
ω
= −
−
(28.2)
Na slici 28.1 je prikazan kontinualni signal
( )
x t
a na slici 28.2 je prikazana njegova Fourier-ova
transformacija. U opštem slu
č
aju bi slika 28.2 trebalo da sadrži dva grafika (i amplitudu i fazu
Fourier-ove transformacije), me
đ
utim pošto smo po slici 28.1 pretpostavili da je signal
( )
x t
paran,
njegova fazna karakteristika je konstantna i jednaka nuli, pa je i ne crtamo. Sa druge strane, ova
č
injenica nije bitna sa stanovišta transformacije koju želimo da izvedemo, pa
ć
e dobijeni rezulat
važiti i za signale proizvoljne fazna karakteristike.
( )
x t
t
Slika 28.1: Realni kontinualni signal
( )
X j
ω
ω
Slika 28.2: Spektar signala
( )
x t
U želji da dobijene rezulate prilagodimo ra
č
unarskoj obradi signala, neophodno je signal
( )
x t
diskretizovati, sa pogodno izabranom periodom diskretizacije (odabiranja)
T
. Kako je ve
ć
objašnjeno u prethodnim predavanjima, model diskretizacije je najjednostavnije sprovesti tako što
ć
emo originalni signal
( )
x t
pomnožiti se beskona
č
nom, periodi
č
nom povorkom Dirakovih impulsa
koji su ekvidistantni sa periodom ponavljanja
T
. Ako sa
( )
p t
ozna
č
imo ovu povorku odbiraka,
(
P j
)
ω
ć
e biti odgovaraju
ć
a Fourier-ova transformacije, pri
č
emu je:
(28.3)
( )
(
)
k
p t
t kT
δ
∞
=−∞
=
−
∑
U pitanju je periodi
č
an signal, pa se može predstaviti Fourier-ovim redom:
( )
( )
0
0
/ 2
0
/ 2
2
1
;
;
T
jk t
jk t
k
k
T
k
p t
a e
a
p t e
T
T
ω
π
ω
∞
−
−
=−∞
=
=
=
∑
∫
1
T
ω
=
(28.4)
Otuda je Fourier-ova transformacija ovog periodi
č
nog signala:
( )
(
)
(
)
0
0
0
0
2
2
k
k
k
P j
a
k
k
T
;
π
ω
π δ ω
ω
ω
δ ω
ω
ω
∞
∞
=−∞
=−∞
=
−
=
−
∑
∑
=
(28.5)
Oblik povorke impulsa
( )
p t
i odgovaraju
ć
eg spektra
( )
P j
ω
su prikazani na slici 28.3 i 28.4.
( )
p t
t
"
"
T
1
Slika 28.3: Periodi
č
na povorka Dirakovih impulsa

( )
Y j
ω
0
ω
ω
0
/ 2
ω
Slika 28.6: Spektar signala
( )
y t
Naš cilj da prilagodimo Fourier-ovu transformaciju ra
č
unarskoj obradi je samo delimi
č
no završen.
Sada signal
predstavlja povorku odbiraka, i s obzirom da on ima vrednosti razli
č
ite od nule
samo u trenucima koji su celi umnošci periode odabiranja
T
, njega je lako memorisati u ra
č
unaru.
Me
đ
utim, problem je taj da ovih odbiraka ima beskona
č
no mnogo, što zna
č
i da nam je potrebna
beskona
č
no velika ra
č
unarska memorija. Taj problem se rešava tako što
ć
emo zadržati samo
N
odbiraka signala
. Najjednostavniji na
č
in da modeliramo ovaj postupak jeste da signal
( )
y t
( )
y t
( )
y t
pomnožimo signalom
( )
w t
koji se u literaturi naziva
pravougaonom prozorskom funkcijom.
Ovaj
signal je prikazan na slici 28.7. Širina pravougaonog prozora je jednaka
tako da se zaista
od beskona
č
no mnogo odbiraka signala
y
č
uva samo njih
N
. Potrebno je odrediti i spektar signala
o
T
NT
=
( )
w t
:
( )
( )
(
)
0
0
0
0
/ 2
/ 2
0
0
0
/ 2
/ 2
2sin
/ 2
sinc
2
T
j t
T
j t
j t
T
T
T
T
e
W j
w t e
dt
e
dt
T
j
ω
ω
ω
ω
ω
ω
ω
ω
−
∞
−
−
−∞
−
−
⎛
=
=
=
=
=
⎜
−
⎝
⎠
∫
∫
⎞
⎟
(28.8)
Spektar prozorske funkcije
( )
w t
prikazan je na slici 28.8.
( )
w t
t
0
/ 2
T
1
0
/ 2
T
−
Slika 28.7: Pravougaona prozorska funkcija
( )
w t
( )
W j
ω
ω
0
1/
T
Slika 28.8: Spektar pravougaone prozorske funkcije dužine
0
T
Sada se kao rezulat primene prozorske funkcije, umesto signala
( )
y t
dobio signal
( )
z t
:
( )
( ) ( )
z t
y t w t
=
(28.9)
koji ima dve dobre osobine: može se upamtiti kao povorka odbiraka i tih odbiraka ima kona
č
no
mnogo. Sa druge strane, spektar signala
( )
z t
se sada dobija kao konvolucija spektara signala
( )
y t
i
( )
w t
:
( )
( )
( )
( )
(
)
(
)
(
)
(
)
(
)
(
)
(
)
0
0
0
0
0
0
0
1
1
*
sinc
2
2
1
1
sinc
2
2
sinc
2
2
k
k
T
2
Z j
Y j
W j
Y j T
T
X j
k
T
d
T
T
N
X j
k
d
ω λ
d
ω
ω
ω
λ
π
π
ω λ
λ
ω
λ
π
ω λ
λ
ω
λ
π
∞
−∞
∞
∞
−∞
=−∞
∞
∞
−∞
=−∞
−
⎛
⎞
=
=
⎜
⎟
⎝
⎠
−
⎛
⎞
=
−
⎜
⎟
⎝
⎠
−
⎛
⎞
=
−
⎜
⎟
⎝
⎠
∫
∑
∫
∑ ∫
λ
(28.10)
Poslednji izraz nije jednostavno sra
č
unati za proizvoljnu funkciju
( )
X j
ω
, me
đ
utim, možemo dati
slede
ć
e tuma
č
enje. Funcija
sa pove
ć
anjem parametra odnosno sa pove
ć
anjem
, sve više i više li
č
i na Dirakov impuls. Dakle, u grani
č
nom slu
č
aju kada bi
,
spektar signala
(
0
sinc
/ 2
T
ω
)
0
T
0
/
N T T
=
0
T
→ ∞
( )
z t
bi bio identi
č
an spektru signala
( )
y t
, me
đ
utim, zbog kona
č
nog parametra
N
,
funkcija
ima 'repove' zbog kojih
ć
e spektar
(
0
sinc
/ 2
T
ω
)
( )
Z j
ω
da li
č
i na spektar
(
Y j
)
ω
ali
ć
e se
primetiti mala razlika u obliku talasanja. Ova talasanja se u literaturi nazivaju '
rippling
' i treba
zapamtiti da je njihov efekat utoliko manji ukoliko je prozorska funkcija šira. Oblik signala
( )
z t
i
njegovog spektra dat je na slikama 28.9 i 28.10.

Vremenski oblik signala
( )
g t
i njegovog spektra dati su na slikama 28.11 i 28.12.
t
( )
g t
0
T
"
"
0
T
0
T
−
Slika 28.11: Vremenski oblik signala
( )
g t
( )
G j
ω
"
"
0
/
T
π
2
ω
1
Slika 28.12: Spektar signala
( )
g t
Množenjem signala
(
G j
)
ω
i
( )
Z j
ω
u frekvencijskom domenu, jasno je kakav
ć
e biti spektar
novodobijenog signala
( )
x t
,
( )
X j
ω
:
( )
( )
( )
(
0
0
;
/
/
0 ;
k
Z j
k
N
)
X j
Z j
ina
č
e
ω
ω
ω
ω
ω
∞
=−∞
=
⎧⎪
=
=
⎨
⎪⎩
∑
k
N
δ ω
ω
−
(28.13)
Me
đ
utim, zanimljivo je šta se dobija u vremenskom domenu nakon množenja signala u
frekvencijskom domenu, drugim re
č
ima zanima nas oblik novodobijenog signala
( )
x t
. Poznato
nam je da, ukoliko se signali množe u frekvencijskom domenu, da u vremenskom domenu oni ulaze
u konvoluciju. Drugim re
č
ima signal
( )
x t
se može napisati kao konvolucija signala
( )
z t
i
( )
g t
:
( ) ( ) ( ) ( )
(
)
( ) (
)
(
)
0
0
0
0
0
*
*
*
k
k
k
0
x t
z t
g t
z t T
t kT
T
z t
t kT
T
z t kT
δ
δ
∞
∞
=−∞
=−∞
∞
=−∞
=
=
−
=
−
=
−
∑
∑
∑
(28.14)
što zna
č
i da
ć
e signal
( )
x t
postati periodi
č
an sa periodom ponavljanja , pri
č
emu
ć
e u osnovnom
vremenskom podru
č
ju
0
T
[
]
0
0
/ 2, / 2
t
T
T
∈ −
vrednost signala
( )
z t
i
( )
x t
biti identi
č
ni, ako se izuzme
multiplikativna konstanta . Signal
0
T
( )
x t
i njegov spektar
( )
X j
ω
su prikazani na slikama 28.13 i
28.14.
( )
x t
t
N
Slika 28.13: Vremenski oblik signala
( )
x t
( )
X j
ω
ω
N
Slika 28.14: Spektar signala
( )
x t
Transformacioni
par
( )
x t
i
( )
X j
ω
je u potpunosti prihvatljiv sa stanovišta ra
č
unarske
obrade jer su i signal u vremenu i njegov frekvencijski spektar predstavljeni kao povorka odbiraka,
dakle po svojoj prirodi su diskretni, a sa druge strane takvih odbiraka ima kona
č
no, u našem slu
č
aju
N
. Ovako dobijeni transformacioni par definiše
diskretnu Fourier-ovu transformaciju
(u literaturi
ozna
č
avanu kao DFT). Osnovne osobine diskretne Fourier-ove transformacije su navedene kroz
slede
ć
e stavove:
1.
Dobijeni signal
( )
x t
u sebi sadrži
N
odbiraka signala
( )
x t
i pri tome je periodi
č
an sa periodom
N
. Dakle, ako želimo da nad nekim kontinualnim signalom primenimo diskretnu Fourier-ovu
transformaciju, potrebno je da izvšimo odabiranje u ekvidistantnim vremenskim trenucima sa
periodom odabiranja
T
, i da na taj na
č
in formiramo diskretnu sekvencu, koju
ć
emo da ozna
č
imo sa
[ ]
,
0,1,...,
x kT
k
N
1
=
−
(28.15)

što je i o
č
ekivan rezultat, jer je spektar periodi
č
nih signala uvek jednak povorci Dirakovih impulsa
u frekvencijskom domenu. Na slikama 28.15 i 28.16. su prikazani vremenski i spektralni oblik
signala
( )
x t
.
t
( )
x t
Slika 28.15: Vremenski oblik signala
( )
x t
( )
X j
ω
ω
3
π
3
π
π
π
2
2
−
5
5
−
Slika 28.16: Spektar signala
( )
x t
Naravno, prikazani grafici su nastali na osnovu analiti
č
kog izra
č
unavanja spektra, me
đ
utim,
naj
č
eš
ć
e mi raspolažemo samo odbircima signala, i to sa kona
č
nim brojem njih, pa nam je želja da i
spektar signala sra
č
unamo pomo
ć
u ra
č
unara, dakle primenom diskretne Fourier-ove transformacije.
Otuda je, kao prvi korak, neophodno izvršiti odabiranje kona
č
nog broja odbiraka signala
( )
x t
.
Važno je, tako
đ
e, pravilno izabrati periodu odabiranja i ona mora biti u saglasnosti sa teoremom o
odabiranju. Kako je maksimalna u
č
estanost u signalu 5
rad/s,
u
č
estanost odabiranja
0
ω
mora biti bar
2 puta ve
ć
a od nje. Usvojimo da je u
č
estanost odabiranja
0
20
/
rad s
ω
=
pa je samim tim perioda
odabiranja
0
2 /
/10 0.314
T
s
π ω
π
=
=
=
. Tako
đ
e, treba se opredeliti za broj odbiraka
N
. Ukoliko
usvojimo
N
=150, mi raspolažemo sa
N
odbiraka signala koji su prikazani na slici 28.17, pri
č
emu
smo od kontinualnog signala dobili diskretni sa vrednostima odbiraka:
[ ]
( )
(
)
(
)
sin 2
3sin 5
,
0,1,...,
1
x k
x kT
kT
kT
k
N
=
=
+
=
−
(28.22)
Primena diskretne Fourier-ove transformacije je vrlo jednostavna primenom programskog paketa
MATLAB. Slede
ć
i kod ilustruje formiranje povorke odbiraka, izra
č
unavanje diskretne Fourier-ove
transformacijom nad povorkom odbiraka i prikaz signala
[ ]
x k
i odgovaraju
ć
eg spektra
[
]
X k
ω
∆
:
close all;
clear all;
N=150;
Ts=pi/10;
for i=1:N
x(i)=cos(2*(i-1)*Ts)+3*cos(5*(i-1)*Ts);
end
figure(1);stem(0:Ts:(N-1)*Ts,x);
xlabel('odbirci k');
ylabel('x[k]');
X=fft(x,N);
figure(2);stem([0:2*pi/(Ts*(N-1)):pi/Ts],abs(X(1:N/2)));
xlabel('ucestanost [rad/s]');
ylabel('X[kw]');
0
5
10
15
20
25
30
35
40
45
50
-4
-3
-2
-1
0
1
2
3
4
odbirci k
x[k
]
Slika 28.17: Odbirci signala
( )
x t