Sistemi Automatskog upravljanja
1 Osnovni pojmovi i principi sistema automatskog upravljanja ...................................................................3
1.1 Definisati pojam i osnovne probleme automatskog upravljanja ........................................................3
1.2 Osnovni elementi sistema automatskog upravljanja (SAU bez i sa povratnom spregom) ................3
1.3 Projektovanje SAU. Procedura projektovanja SAU ..........................................................................3
2 Matematički modeli sistema ......................................................................................................................4
2.1 Definisati i objasniti osnovne korake pri analizi dinamičkih sistema ................................................4
2.2 Opisivanje fizičkih sistema diferencijalnim jednačinama ..................................................................4
2.3 Linearizacija modela fizičkih sistema ................................................................................................5
3 Primena Laplasove transformacije u sistemima automatskog upravljanja ................................................5
3.1 Definicija i osobine Laplasove transformacije ...................................................................................5
3.2 Standardne pobudne funkcije .............................................................................................................6
3.3 Inverzna Laplasova transformacija ....................................................................................................7
3.4 Primena Laplasove transformacije u analizi SAU .............................................................................8
4 Funkcija prenosa sistema automatskog upravljanja ...................................................................................9
4.1 Funkcija prenosa sistema automatskog upravljanja sa jednim ulazom i jednim izlazom ..................9
4.2 Strukturni blok dijagram SAU ...........................................................................................................9
4.3 Algebra funkcije prenosa ..................................................................................................................10
4.4 Graf toka signala ..............................................................................................................................11
4.5 Mason-ov obrazac ............................................................................................................................12
4.6 Funkcije prenosa multivarijabilnih sistema ......................................................................................12
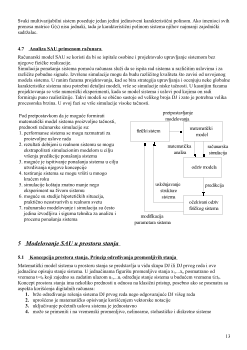
4.7 Analiza SAU primenom računara ....................................................................................................13
5 Modelovanje SAU u prostoru stanja ........................................................................................................13
5.1 Koncepcija prostora stanja. Princip određivanja promenljivih stanja ..............................................13
5.2 Odnos između matematičkog modela sistema u vremenskom i kompleksnom domenu .................14
5.3 Prva kanonična forma (redno programiranje) ..................................................................................15
5.4 Druga kanonična forma (direktno programiranje) ...........................................................................16
5.5 Jordan-ova kanonična forma ............................................................................................................17
5.6 Jordan-ova matrica stanja za slučaj sistema sa višestrukim realnim polovima ................................17
5.7 Linearizacija nelinearnih sistema i formiranje linearizovanog modela u prostoru stanja ................18
6 Analiza SAU u prostoru stanja .................................................................................................................20
6.1 Ponašanje stanja i odziva sistema .....................................................................................................20
6.2 Fundamentalna matrica (definicija, osobine, načini određivanja) ...................................................21
6.3 Određivanje fundamentalne matrice primenom nesingularne transformacije .................................22
6.4 Kontrolabilnost sistema (definicija i način provere) ........................................................................23
6.5 Observabilnost sistema (definicija i način provere) .........................................................................23
7 Karakteristike i performanse SAU ...........................................................................................................23
7.1 Osetljivost sistema na promenu vrednosti parametara .....................................................................23
7.2 Regulacija tranzijentnog odziva SAU ..............................................................................................24
7.3 Signal poremećaja u sistemima automatskog upravljanja ................................................................24
7.4 Greška rada u stacionarnom stanju sistema sa otvorenom i zatvorenom povratnom spregom ........25
7.5 Cena povratne sprege .......................................................................................................................25
7.6 Preformanse SAU – karakteristike sistema drugog reda ..................................................................26
7.7 Veza između lokacije polova funkcije prenosa SAU u kompleksnoj s-ravni i odziva u prelaznom
režimu .....................................................................................................................................................27
7.8 Greška rada SAU sa povratnom spregom, u stacionarnom stanju – odskočna pobuda ...................27
7.9 Greška rada SAU sa povratnom spregom, u stacionarnom stanju – nagibna pobuda ......................28
7.10 Greška rada SAU sa povratnom spregom, u stacionarnom stanju – parabolična pobuda ..............28
7.11 Indeksi performanse .......................................................................................................................29
8 Analiza stabilnosti SAU algebarski kriterijumi .......................................................................................29
8.1 Definisati osobinu stabilnosti SAU ..................................................................................................29
8.2 Objasniti vezu između lokacije polova u kompleksnoj s-ravni i stabilnosti SAU ...........................30
8.3 Routh-ov kriterijum stabilnosti SAU ...............................................................................................30
1
8.4 Hurwitz-ov kriterijum stabilnosti SAU ............................................................................................31
8.5 Stabilnost SAU opisanih matematičkim modelom u prostoru stanja ...............................................31
9 Geometrijsko mesto korena .....................................................................................................................31
9.1 Definicije GMK ................................................................................................................................31
9.2 Konstrukcija GMK – broj grana, početak i završetak grana, simetrija GMK ..................................31
9.3 Konstrukcija GMK – način određivanja asimptota grana, intervali preklapanja grana GMK i Re-
ose ...........................................................................................................................................................32
9.4 Konstrukcija GMK – ugao pod kojim grane GMK napuštaju jednostruke i višestruke polove i
dolaze u jednostruke i višestruke konačne nule funkcije povratnog prenosa sistema ...........................32
9.5 Konstrukcija GMK – tačke spajanja i razdvajanja grana GMK i Re-ose ........................................32
9.6 Konstrukcija GMK – presek grana GMK i Im-ose s-ravni ..............................................................33
9.7 Konstrukcija GMK – određivanje pojačanja funkcije povratnog prenosa u proizvoljnoj tački GMK
.................................................................................................................................................................33
9.8 Primena metoda GMK na određivanje uticaja promene pojedinih parametara na lokaciju polova
sistema ....................................................................................................................................................33
10 Frekventne metode analize sistema automatskog upravljanja ...............................................................34
10.1 Definisati amplitudno fazno frekventnu karakteristiku ..................................................................34
10.2 Definisati Bodeove dijagrame ........................................................................................................34
10.3 Bodeovi dijagrami elementa sa konstatnim pojačanjem, nule i pola u koordinatnom početku .....35
10.4 Bodeovi dijagrami aperiodičnog elementa prvog reda (nula i pol na realnoj osi) .........................36
10.5 Bodeovi dijagrami oscilatornog elementa drugog reda (kompleksne nule i polovi sistema) ........37
10.6 Očitavanje konstanti greške sa Bodeovih dijagrama ......................................................................38
10.7 Definisati Nuquist-ov kriterijum stabilnosti ...................................................................................38
10.8 Karakteristike rada sistema u prelaznom režimu u frekventnom domenu .....................................39
10.9 Cipkinovo pravilo prelaza ..............................................................................................................39
11 PID regulatori .........................................................................................................................................39
11.1 Osnovni tipovi regulatora (P, I, D) .................................................................................................39
11.2 PI regulator .....................................................................................................................................40
11.3 PD regulator ...................................................................................................................................41
11.4 PID regulator ..................................................................................................................................41
11.5 Eksperimentalno određivanje parametara regulatora (otvorena i zatvorena sprega) .....................41
11.6 Ziegler-Nicholsova metoda podešavanja parametara regulatora ....................................................42
12 Uvod u digitalne sisteme automatskog upravljanja ...............................................................................42
12.1 Definisati digitalni SAU .................................................................................................................42
12.2 Sistemi sa mešovitim analognim i diskretnim komponentama ......................................................43
12.3 Kolo zadrške nultog reda ................................................................................................................43
12.4 Definisati Z-transformaciju ............................................................................................................43
12.5 Diskretna funkcija prenosa SAU sa otvorenom i zatvorenom povratnom spregom ......................44
12.6 Definicija stabilnosti sistema u Z-domenu .....................................................................................44
12.7 Realizacija PID regulatora u digitalnoj tehnici ..............................................................................44
Literatura .....................................................................................................................................................45
2
2 Matematički modeli sistema
2.1 Definisati i objasniti osnovne korake pri analizi dinamičkih sistema
Matematički model služi da bi se razumela dinamika i projektovalo upravljanje za neki kompleksni
sistem. Pošto su razmatrani sistemi u prirodi dinamički, za njihovo opisivanje se koriste sistemi
diferencijalnih jednacina (DJ). Pri rešavanju sistema DJ pogodno je koristiti Laplasove transformacije
(LT) ali se pre LT mora izvršiti linearizacija ukoliko je sistem opisan nelinearnim DJ. U praksi, sistemi
mogu biti veoma komplikovani pa je u procesu modelovanja potrebno uvesti određene pretpostavke,
zanemarivanja i uprošćenja.
Analiza dinamičkih sistema se moze rasčlaniti na sledeće korake:
1.
definisanje sistema i njegovih komponenti
2.
formulisanje matematičkog modela uz nabrajanje usvojenih pretpostavki
3.
pisanje sistema DJ koji opisuje model (sistem)
4.
rešavanje postavljenog sistema jednačina po željenim izlaznim promenljivima
5.
provera tačnosti rešenja i usvojenih pretpostavki
6.
ako je potrebno, ponovo proanalizirati sistem i ponovo formulisati model
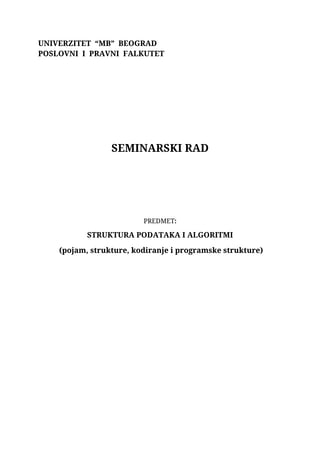
2.2 Opisivanje fizičkih sistema diferencijalnim jednačinama
DJ koje opisuju pojedine sisteme se postavljaju na osnovu fizičkih zakona koji opisuju pojedine procese.
U nekim slučajevima se fizički različite pojave opisuju jednačinama istog oblika i tada se uspostavljaju
analogije.
f(t) – sila koja vuče telo u desno
y(t) – položaj tela
K – koeficijent krutosti
M – inercija tela
b – koeficijent trenja
Diferencijalna jednačina koja opisuje dinamiku
posmatranog mehaničkog sistema:
f
t
= M
⋅
d
2
y
t
dt
2
b
⋅
dy
t
dt
K
⋅
y
t
Električno kolo se može opisati sledećim izrazom:
i
t
= i
g
i
l
i
c
= G
⋅
u
t
1
L
⋅
∫
0
t
u
t
dt
C
⋅
du
t
dt
Pošto je u
t
=
d
t
dt
, prethodni izraz se može
napisati: i
t
= C
⋅
d
2
t
dt
2
G
⋅
d
t
dt
1
L
⋅
t
Prethodne jednačine su istog oblika iako opisuju različite sisetme. Uspostavljaju se sledeće analogije:
Mehaničke veličine
Električne veličine
sila f(t) ↔ struja i(t)
položaj y(t) ↔ fluks ψ(t)
masa M ↔ kapacitivnost C
trenje b ↔ provodnost G
krutost (elastičnost) K ↔ recipročna vrednost induktivnosti 1/L
4
M
K
b
f(t)
y(t)
i(t)
u(t)
G=1/R
L
C
i
c
i
l
i
g
2.3 Linearizacija modela fizičkih sistema
Većina fizičkih sistema je linearna u određenim granicama. Osobina linearnosti sistema se definiše preko
pojmova pobude (ulaza) i odziva (izlaza). Generalno, mi ćemo pobudu označavati sa u(t) a odziv sa y(t).
Neophodan uslov da bi sistem bio linearan može se definisati preko pojmova pobude i odziva na sledeći
način:
1.
Ako se sistem pobudi sa u
1
(t), daje odziv y
1
(t). Ako se pobudi sa u
2
(t), daje odziv y
2
(t). Da
bi sistem bio linearan treba da važi u
1
(t)+u
2
(t)=y
1
(t)+y
2
(t) (princip superpozicije).
2.
Ako sistem, pobuđen sa u(t), daje y(t), tada, ako je sistem linearan, za pobudu β∙u(t) (β=const) daje
odziv β∙y(t) (princip homogenosti).
Da bi sistem bio linearan mora zadovoljavati principe superpozicije i homogenosti.
Posmatra se neki nelinearni sistem opisan opštom relacijom y(t)=g(u(t)), gde je y(t) izlaz neke nelinearne
funkcije g ulaznog signala u(t). Nominalan radna tačka je definisana vrednošću u
0
. Pošto je funkcija g
kontinualna u oblasti od interesovanja ona se za vrednost u okolini radne tačke (u(t) = u
0
) može razviti u
Tejlorov red
y = g
u
= g
u
0
dg
du
|
u = u
0
⋅
u
−
u
0
1
!
d
2
g
du
2
|
u = u
0
⋅
u
−
u
0
2
2
!
d
3
g
du
3
|
u = u
0
⋅
u
−
u
0
3
3
!
...
Nagib funkcije u radnoj tački dg
du
|
u = u
0
je dobra aprokcimacija krive g(u(t)) za mali interval (u-u
0
)
odstupanja od radne tačke. U tom slučaju se mogu odbaciti viši članovi Tejlorovog reda
y = g
u
0
dg
du
⋅
u
−
u
0
= y
0
m
⋅
u
−
u
0
što se može napisati kao linearna jednačina y−y
0
=m∙(u−u
0
) ili ∆y=m∙∆u
3 Primena Laplasove transformacije u sistemima automatskog upravljanja
3.1 Definicija i osobine Laplasove transformacije
LT funkcije f(t) se definiše na sledeći način
L
{
f
t
}
= F
s
=
∫
0
∞
f
t
⋅
e
−
s
⋅
t
dt
gde je s =
±
j
kompleksna promenljiva. LT se ne može odrediti za sve funkcije (npr. t
t
) ali se takve
funkcije retko susreću u teoriji i praksi.
Osobine:
1.
teorija linearnosti
- homogenost:
L
{a
⋅
f
t
}= a
⋅
F
s
a-realna konstanta
- aditivnost:
L
{f
1
t
f
2
t
} = F
1
s
F
2
s
- linearnost:
L
{a
1
⋅
f
1
t
a
2
⋅
f
2
t
} = a
1
⋅
F
!
s
a
2
⋅
F
2
s
2.
čisto vremensko kašnjenje
- za sve funkcije istog oblika f(t) i f(t−τ), gde druga kasni za prvom za vreme τ, se može definisati:
L
{f
t
−
} = e
−
s
⋅
⋅
F
s
3.
pomeranje kompleksnog lika
- pogodno za određivanje LT funkcija koje sadrže eksponencijalne faktore
L
{e
−
a
⋅
t
⋅
f
t
} = F
s
a
4.
konvolucija originala f
t
= f
1
t
∗
f
2
t
=
∫
0
t
f
1
t
−⋅
f
2
d
=
∫
0
t
f
1
⋅
f
2
t
−
d
5

3.3 Inverzna Laplasova transformacija
Na osnovu poznatog kompleksnog lika moguće je odrediti funkciju u vremenskom domenu primenom
inverzne LT
L
−
1
{ F
s
} = f
t
=
1
2
⋅⋅
j
⋅
∫
−
j
⋅
j
⋅
F
s
⋅
e
s
⋅
t
ds , t
0
Funkcije koje su od posebnog interesa date su u obliku realnih racionalnih funkcija kompleksne
promenljive s, tj. kao razlomak dva polinoma sa realnim koeficijentima
F
s
=
P
s
Q
s
=
b
m
⋅
s
m
b
m
−
1
⋅
s
m
−
1
...
b
1
⋅
s
b
0
s
n
a
n
−
1
⋅
s
n
−
1
...
a
1
⋅
s
a
0
Razmatraće se situacija kada je n≥m, koja je i najčešća u analizi i sintezi kontinualnih stacionarnih
linearnih sistema sa koncentrisanim parametrima. Koreni polinoma P(s) su nule, a koreni polinoma Q(s)
su polovi funkcije F(s). Prvo se funkcija F(s) rastavlja na parcijalne razlomke pa se tek onda primenjuje
inverzna LT. Od posebnog značaja su polovi funkcije F(s) i tu se mogu uočiti četiri karakteristična
slučaja:
1.
svi polovi funkcije F(s) su realni i prosti
Izvrši se faktorizacija polinoma Q(s), odnosno reši se jednačina Q(s)=0
F
s
=
P
s
Q
s
=
b
m
⋅
s
m
b
m
−
1
⋅
s
m
−
1
...
b
1
⋅
s
b
0
s
−
s
1
⋅
s
−
s
2
⋅
...
⋅
s
−
s
n
F(s) se razvije u parcijalne razlomke: F
s
=
P
s
Q
s
=
K
1
s
−
s
1
K
2
s
−
s
2
...
K
n
s
−
s
n
Koeficijenti se izračunavaju prema izrazu: K
k
=
[
s
−
s
k
⋅
P
s
Q
s
]
s = s
k
, k = 1,2 ,... , n
Nakon određivanja koeficijenata moguće je odretiti inverznu LT
L
−
1
{
F
s
}
= f
t
=
∑
k =1
n
K
k
⋅
e
s
k
⋅
t
2.
postoje konjugovano kompleksni polovi, a realni su, ako postoje, prosti
Pretpostavka je da jednačina Q(s)=0 ima samo jedan par konjugovano kompleksnih polova (s
1
i s
2
= s
1
*
)
a da su svi ostali realni i prosti:
F
s
=
P
s
Q
s
=
b
m
⋅
s
m
b
m
−
1
⋅
s
m
−
1
...
b
1
⋅
s
b
0
s
−
s
1
⋅
s
−
s
1
*
⋅
s
−
s
3
⋅
...
⋅
s
−
s
n
=
K
1
s
−
s
1
K
1
*
s
−
s
1
*
K
2
s
−
s
2
...
K
n
s
−
s
n
Ako je s
1
=
−
j
⋅
i s
1
*
=
−−
j
⋅
, tada je K
1
=
−
a
j
⋅
b i K
1
*
=
−
a
−
j
⋅
b
F
s
=
a
j
⋅
b
s
−
j
⋅
a
−
j
⋅
b
s
j
⋅
∑
k = 3
n
K
k
s
−
s
k
= 2
⋅
a
⋅
s
s
2
2
−
2
⋅
b
⋅
s
2
2
∑
k =3
n
K
k
s
−
s
k
Inverzna LT je
f
t
= 2
⋅
a
⋅
e
−⋅
t
⋅
cos
⋅
t
−
2
⋅
b
⋅
e
−⋅
t
⋅
sin
⋅
t
∑
k =3
n
K
k
⋅
e
s
k
⋅
t
Koeficijent K
1
= a
j
⋅
b se izračunava prema obrazcu: K
k
= a
j
⋅
b =
[
s
−
j
⋅⋅
P
s
Q
s
]
s =
−
j
⋅
3.
funkcija F(s) ima višestruke realne polove
Pretpostavka je da jednačina Q(s)=0 ima jedno višestruko (npr. trostruko) rešenje s
1
, a da su ostali polovi
funkcije F(s) realni i prosti
F
s
=
P
s
Q
s
=
b
m
⋅
s
m
b
m
−
1
⋅
s
m
−
1
...
b
1
⋅
s
b
0
s
−
s
1
3
⋅
s
−
s
4
⋅
...
⋅
s
−
s
n
=
K
11
s
−
s
1
3
K
12
s
−
s
1
2
K
13
s
−
s
1
K
4
s
−
s
4
...
K
n
s
−
s
n
7