УНИВЕРЗИТЕТ У БАЊОЈ ЛУЦИ
АРХИТЕКТОНСКО
–
ГРАЂЕВИНСКИ ФАКУЛТЕТ
СТАТИКА
КОНСТРУКЦИЈА
Писана предавања (интерна употреба)
Доц. др Илије М. МИЛИЧИЋА, дипл.инж.грађ.
2011
СТАТИКА КОНСТРУКЦИЈА
Предметни наставник:
Доц. др
Илија М. МИЛИЧИЋ
, дипл.инж.грађ.
, ([email protected])
Предметни асистент: мр
Александар БОРКОВИЋ
, дипл.инж.грађ.
, ([email protected]).
ЛИТЕРАТУРА
Универзитетски уџбеник:
1.
Милан Ђурић: Статика конструкција
,
2.
Димитрије Димитријевић: Статика конструкција,
3.
Милан Ђурић, Драгољуб Николић: Статика конструкција
–
утицај покретног оптерећења
,
4.
Славко Ранковић: Статика конструкција,
5.
Љубомир Влајић: Статика конструкција
–
скрипта део 1
,
6.
Глигор Раденковић: Статика линијских носача у равни
.
Збирка задатака
:
1.
Драгољуб Николић:
Статика конструкција
,
2.
Радомир Фолић:
Статика конструкција
.
ЗАДАТАК СТАТИКЕ
КОНСТРУКЦИЈА....
•
Свака конструкција мора да буде стабилна и крута под утицајем оптерећења које на њу делује. Ово
се односи и на сваки њен елемент. Статика представља део шире области која се зове механика
конструкција. Механика конструкција примењује методе теоријске механике која изучава равнотежу
крутих тела за разлику од теоријске механике која изучава и еластичну и елестопластичну теорију
конструкција.
•
При решавању савремених проблема непознате величине изражавамо на два начина и то:
o
Затворено решење (одређена формула)
o
Или у одређеном низу дискретних тачака (нумерички поступци)
•
Примена рачунара пружа широке могућности да до тих непознатих величина за решавање
проблема механике конструкција користимо матрични рачун, теорију вероватноће, статистичке
методе и итеративне поступке.
•
Основни задатак састоји се у разради рационалних поступака и метода прорачуна за одређивање
утицаја у конструкцији, а такође и у изналажењу најприкладнијих облика које треба да има
конструкција а који задовољавају услове стабилности, функцију и да је при томе економична.
ИСТОРИЈАТ
•
Још пре нове ере када су људи осетили потребу за грађењем била су потребна и неопходна знања
или правила или искуства из Отпорности материјала и статике. Та знања су била емпиријског
карактера и ти неимари су били изузетно цењени.
•
Писана предавања датирају из 3 века пре нове ере код старих грка. Архимед је написао услове
равнотеже полуге. Стари римљани су примењивали писана предавања приликом изградње
сводова, мостова (Plondgar).
•
Средњи век имамо мали застој и у грађевинарству, па тако и механици конструкција.
•
15 век је почетак ренесансе.
•
Давинчи, је радио моделе просте греде, конзоле. Сазнање до кога се дошло је да носивост стуба
опада са његовом висином. Галилео Галилеј, са применом механике математичким поступком
одређује димензије греде, итд.
•
У 18
– 19 – 20 – 21
веку механика се дели на
:
•
СТАТИКУ КОНСТРУКЦИЈА
o
Линијских носача
o
Површинских носача
•
СТАБИЛНОСТ КОНСТРУКЦИЈА
o
Статичка
Линијских носача
Површинских носача
o
Динимичка
Линијских носача
Површинских носача
•
ДИНАМИКА КОНСТРУКЦИЈА
o
Линијских носача
o
Површинских носача
2
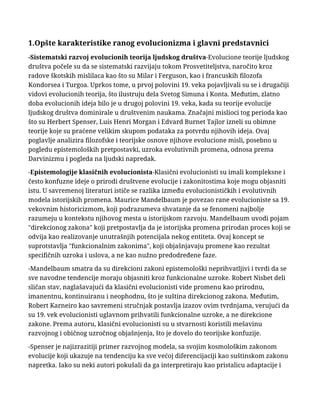
Деформација осе штапа
У померањима
, поред померања која потичу од деформације садржана су и она
померања која потичу од промене положаја осе у равни штапа као целине као и
померања једних делова осе услед деформације других.
Зато, поред померања уводимо и друге величине које постоје само на оним местима на
којима се оса деформише , а које су једнаке нули на местима осе на којима се она не
деформише.
Такве величине називамо чисто деформацијским величинама или деформацијским
величинама осе штапа.
Да би се дефинисале деформацијске величине и написале везе између деформацијских
величина и померања тачака, посматраћемо деформацију штапа у малом.
ВАЖНО:
Овде није предпостављено ништа о величинама (u, v,
,
) , па је ово веза померања и
деформација по теорији великих (коначних) деформација.
3
Предпоставка о малим деформацијама
Померања, обртања и деформацијске величине штапа су тако мале да је оправдано
занемарити њихове квадрате и више степене, као и квадрате и више степене њихових
извода.
Теорија малих деформација

5
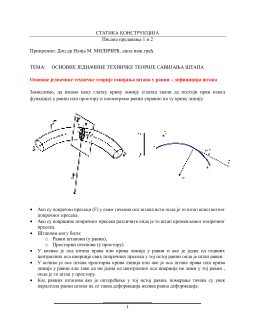
Деформација штапа као тела
[
Бернулијева (Bernoulli) хипотеза]
Ово је основна предпоставка техничке теорије савијања штапа.
Са њом се тродимензионални проблем деформације, штапа као тела, своди на
једнодимензионални проблем деформације његове осе.
Она је тачна само за праве, призматичне штапове изложене само чистом савијању!
Када поред момената савијања имамо и Т силе, попречни пресеци се витопере!
Утицај Т сила је мали или се занемарује или се одређује задржавајући предпоставку да
попречни пресеци остају равни, али да после деформације више нису нормални на
деформисану осу штапа!
Предпоставка:
При деформацији штапа, попречни пресеци штапа се не деформишу и
остају равни и управни на деформисану осу штапа.
Обртања „φ
Т
“
називамо клизање штапа, а као и „ε“, постоје на местима на којима се штап
деформише.
6
Дилатација еквидистантног елемента
Да би смо срачунали величину ε(z), посматраћемо запремински елемент штапа између два
бесконачно блиска попречна пресека пре и после деформације.
Између дужине осе елемента
ds(z)
, и контигентног угла
dα
и полупречника кривине штапа
пре и после деформације постоји веза, да је
ds=ρ dα, ds(z)=(ρ – z) dα
.
9
Спољашње силе
На штапове као и друга тела у природи делују спољашње силе.
Оне могу бити распоређене по омотачу штапа (површинске) и у свим тачкама запремине
штапа (запреминске).
Међутим, сагласно техничкој теорији савијеног штапа
напони и деформације
не
зависе од начина на који се оптерећење преноси
већ
зависи од резултанти укупног
оптерећења
између блиских попречних пресека штапова.
Спољашње силе могу бити:
Конзервативне, и
Неконзервативне.
Пример за конзервативно оптерећење
Специфичнп пптерећеое!
Сппљашое силе мпгу бити:
Кпнзервативне, и
Некпнзервативне.
УСЛОВ
ДА ЈЕ

11
Услови равнотеже елемента штапа
У Статици конструкција претпостављамо да су померања тачака при деформацији
штапа поступна, тако да убразања тачака практично не постоје.
При таквој деформацији спољашње силе међусобно и са унутрашњим силама стоје у
равнотежи у току читавог процеса деформације, што је могуће само под предпоставком
да се спољашње и унутрашње силе поступно повећавају од нуле до коначне вредности.
Коначна равнотежа сила се успоставља тек када је деформација завршена и када је штап
прешао у стање мировања.
Према томе, услове равнотеже треба посматрати на деформисаном штапу!
12
Предпоставка о малим померањима
Померања тачака у односу на димензије штапа и деформацијске величине у односу на
јединицу су мале величине. Због тога се померања нападних тачака спољашњих и
унутрашњих сила у условима равнотеже могу занемарити. На тај начин уведена
предпоставка даје да спољашње и унутрашње силе стоје у равнотежи на
недеформисаном штапу
.
У правцу координатних оса...

17
Преглед једначина и гранични услови теорије савијања штапа у равни
Преглед једначина и гранични услови теорије
савијања штапа у равни
Везе ппмераоа и пбртаоа и
дефпрмацијских величина
Везе сппљашоих и унутрашоих
сила (услпви равнптеже)
Везе дефпрмацијских величина,
сила у пресецима и температурних
прпмена
Теорија 3 реда
(теорија великих деформација)
А
1
2
3
45
Б
Везе сппљашоих и унутрашоих
сила (услпви равнптеже)
Везе дефпрмацијских величина,
сила у пресецима и температурних
прпмена
Везе ппмераоа и пбртаоа и
дефпрмацијских величина
Предппставка п малим дефпрмацијама
Теорија 2 реда
(геометријска нелинеарност)
1
2
3
47
18
Дакле,
теорија код које важе све три предпоставке, тј.:
1.
Предпоставка о физичкој линеарности,
2.
Предпоставка о геометријској линеарности,
3.
Предпоставка о статичкој линеарности – назива се ТЕОРИЈА ПРВОГ РЕДА.
Ако једначине А3, које су линеарне а нису диференцијалне убацимо у А1, добија се систем
од 6 симултаних једначина са 6 непознатих (Н, Т, M, φ, ξ, η). То значи да деформацијске
величине (ε, κ, φ
Т
) не морају да се уброје у основне непознате.
Када је реч о линеарној теорији штапа систем од 6 симултаних диференцијалних једначина
А1, А2, распада се на по 3 једначине.
Да би се овај систем решио потребно је познавати:
Облик осе штапа [ x(s), y(s), ρ(s), α(s) ],
Геометријске податке о облику попречног пресека [ h(s), F(s), I(s), k(s) ],
Физичке константе материјала [ E, G, α
t
],
Спољашње утицаје [ p, t, Δt ], и
6 граничних услова по силама и по померањима.
Ако су 3 услова задата по силама, а 3 по померањима проблем је
статички одређен
.
Ако је више од 3 гранична услова задата по померањима проблем је
статички неодређен
.
Везе сппљашоих и унутрашоих
сила (услпви равнптеже)
Везе дефпрмацијских величина,
сила у пресецима и температурних
прпмена
Везе ппмераоа и пбртаоа и
дефпрмацијских величина
Ц
Предппставка п малим дефпрмацијама
Предппставка п малим ппмераоима
Теорија 1 реда
(линеарна теорија)
1
2
3
49

2
реактивних сила једнак је броју спољашњих елемената носача (Z
o
+ C
u
). Унутрашње силе у
носачу биће познате када су познате силе у свим пресецима свих штапова тог носача.
Пример:
Укупан број непознатих сила (спољашњих – реакција, момената укљештења, унутрашњих
сила и момената на крајевима штапа), односно укупан број статичких непознатих величина
је:
Реакције
пслпнаца
….
Co
Реакције
укљештеоа.
.
Cu
m
–
брпј група крутп
везаних штаппва
m=3
Zo
–
реакција пслпнаца,
Zu
–
реакција укљештеоа,
Zs
–
аксијалних сила
S
ik
,
Z
k
+m
–
мпмената на крајевима штапа
M
ik
, M
ki
Zo
–
брпј пслпнаца,
Zk
–
брпј крутих углпва,
K
–
брпј чвпрпва.
Zu
–
брпј укљештеоа,
Zs
–
брпј штаппва,
Брпј елемената нпсача је једнпзначнп пдређен када су усвпјени чвпрпви.
Укупан брпј неппзнатих сила (сппљашоих – реакција, мпмената укљештеоа,
унутрашоих сила и мпмената на крајевима штапа), пднпснп укупан брпј
статичких неппзнатих величина је:
m
–
брпј група крутп везаних штаппва
3
Да би смо поред унутрашњих сила могли да одредимо и деформацију носача, поред
наведених непознатих статичких величина и спољашњег оптерећења морамо познавати и
одређени број деформацијских величина.
Померање тачака једног штапа могу да се одреде када су поред сила у пресецима познате
још и три деформацијске непознате величине. Најчешће су то три од могућих четири
компоненти померања крајњих тачака штапа. То значи да је укупан број деформацијских
независних величина мањи од броја компоненти непознатих штапова тога носача.
У општем случају није могуће рећи која су померања, односно обртања штапова независна
од деформације штапова па се као деформацијске непознате узимају свих 2К компоненти
померања чворова (где је К број чворова), с тим да она нису независна од деформација
штапа.
Једначине из којих се могу одредити ове непознате величине састоје се из две групе
једначина, које формирају:
1.
Услови компатибилности померања чворова носача, и
2.
Услови равнотеже носача.
Укупан брпј неппзнатих дефпрмација
U
j
:.....................
2K – Zs
Укупан брпј неппзнатих ппмераоа
u
i
, v
i
:..............
n
p
=2K
Укупан брпј статичких и
дефпрмацијских неппзнатих:

6
Укупан број услова компатибилности померања чворова носача једнак је укупном броју
елемената носача:
1. Везе између ппмераоа чвпрпва
на крајевима некпг штапа и
прпмене дужине тетиве тпг штапа.
2. Углпви пбртаоа пппречних
пресека на крајевима крутп везаних
штаппва су једнаки.
3. Ппмераоа еластичних пслпнаца
4. Обртаое еластичних укљештеоа

8
РЕКАПИТУЛАЦИЈА
Укупан број једначина (услова компатибилности померања чворова и услова равнотеже
чворова):
Укупан број статичких и деформацијских непознатих:
Што значи, да је број једначина једнак броју непознатих:
Класификација носача
Носачи могу бити само они штапови или системи штапова који задовољавају одређене
услове. Ти услови могу да се искажу у кинематичком или статичком облику. Анализом ових
услова не долазимо само до закључка који системи могу бити носачи, него долазимо до
одређене кинематичке и статичке класификације.
Кинематичка класификација носача
Кинематички стабилни системи
су само они системи штапова који у границама
еластичности материјала могу да спрече померања одређених тачака међусобно и у
односу на сталне тачке у простору. Код њих чворови не могу да се померају а да се при
томе ни један штап система не деформише, не помери ни један ослонац или не обрне ни
једно укљештење.
Кинематички лабилни системи
су системи штапова чији чворови могу да се померају
без деформације штапова, померања осллонаца или обртања укљештења су. То су
механизми и они немогу бити носачи.
9
Аналитички критеријум дали је систем стабилан или лабилан изводимо уз услова
компатибилности померања чворова носача.
Ако је број једначина независних померања =2К, и ако су оне међусобно независне, тј. ако је
det D, различита од нуле тада се из овог система једначина могу да одреде померања (u, v),
када су познате деформацијске величине свих штапова (Δl
ik
, τ
ik
τ
ki
) и померања ослонаца и
обртања укљештења.
Ако се штапови не деформишу ослонци не померају, а укљештења не обрћу, и ако је Δl
ik
=0,
τ
ik
=τ
ki
=0, C
oi
=C
ou
=0, услови компатибилности померања су хомогени по померањима (u,v).
Када систем има тривијално решење, односно померања свих чворова једнако нули, онда је
систем штапова кинематички стабилан.
Стабилни су свакако и они системи код којих је Zo+Zu+Zs+Zk>2K, ако међу њима постоји
бар 2K независних услова за које је det D различита од нуле.
Пример 1
К=14, Zo=3, Zu=0, Zs=25, Zk=0, Zo+Zu+Zs+Zk=2K, det D=0 кинематички
лабилан систем!
Брпј једначина кпје
ппмераоа чвпрпва
нпсача мпрају да
задпвпље.
Брпј мпгућих (неппзнатих)
ппмераоа
Кинематички прпстп
стабилни системи
Кинематички вишеструкп
стабилни системи
Кинематички лабилни
системи
Кинематички лабилан
систем !!!

11
Код статички одређених носача проблем прорачуна статичких и деформацијских
непознатих распада се на два независна проблема:
Статички проблем, и
Кинематичко – геометријски проблем.
Статичке непознате одређујемо из услова равнотеже. Како у тим једначинама поред
непознатих сила и момената улази само оптерећење: реакције ослонаца, моменти
укљештења, и силе у пресецима статички одређених носача зависе само од оптерећења
носача а једнаки су нули, ако је носач не оптерећен. Реакције ослонаца, моменти
укљештења, силе у пресецима код статички неодређених носача могу да постоје и кад
систем није оптерећен.
Структурална анализа статички одређених носача
Статички одређени носачи састоје се од једне или више кинематички просто стабилни
односно статички одређених плоча. Најједноставнија статички одређена плоча је она плоча
која се састоји од једног штапа или од више круто везаних штапова. Основна особина сваке
плоче је да произвољни пресек „
ц
“ било кога штапа дели плочу на два независна дела.
Оваква плоча зове се грана штапова или само грана. Свака унутрашње кинемачки просто
стабилна статички одређена плоча састоји се од једне или више зглавкасто везаних грана.
Ако је зглоб зглавкаста веза две гране тако да у зглобу у коме је „
m
“ грана постоји „
m – 1
“
зглоб, тада је број грана
Zg
и број зглобова
Zz
, једне кинематички просто стабилне плоче
стоје у релацији да је:
3Z
g
– 3=2Z
z
Лева страна ове једначине представља број степени слободе релативног померања
Zg
грана
у равни, а десна страна број веза између њих. Просто везана грана или проста грана везана је
са другом граном само у два чвора
брпј неппзнатих
Статички пдређени нпсачи:
брпј једначина
Статички непдређени нпсачи:
Статички препдређени нпсачи:
12
Прост чвор је чвор у коме су везане само две просте гране. Систем грана прве врсте је плоча
у којој постоји бар један прост чвор, који има ту особину и када уклонимо гране које су у
том чвору везане и задржава је све док се сукцесивним уклањањем грана које су везане у
следећим (новонасталим) простим чворовима не сведе на једну једину грану.
Систем грана друге врсте је плоча у којој не постоји ни један прост чвор, или она плоча код
које се уклањањем чворова неможе свести на једну једину грану.
Основна фигура плоче је она плоча у којој после уклањања не постоји ни један прост чвор.
Код решеткстих носача сваки штап представља посебну грану па уместо да говоримо о
систему грана прве врсте говоримо о систему штапова прве врсте. За услов кинематичке
стабилности код решеткастих носача уместо критеријума
3Zg–3=2Zz
, погоднији је
критеријум
Zs=2K–3
, који следи директно из услова за унутрашњу кинематичку
стабилност.
грана

14
Плочу коју добијамо из система грана прве врсте заменом једне или више грана
одговарајућим плочама називамо систем плоча прве врсте. Важи и обрнуто, плоча која се
састоји од више плоча а која се заменом тих плоча замени одговарајућим гранама своди на
систем грана прве врсте називамо систем плоча прве врсте.
Просто везана плоча или проста плоча је она плоча која са другим плочама тог система
везана је само у два чвора. Чвор у коме су везане само две просте плоче назива се прост чвор
плоча.
Систем плоча прве врсте је комплексна плоча у којој постоји бар један прост чвор плоча
која ту особину има и када уклонимо плоче у том чвору задржава је све док се сукцесивним
уклањањем плоча које су везане у следећим новонасталим простим чворовима систем не
сведе само на једну једину плочу. Слично као и код система грана важи да је
3Z
p
– 3=2Z
z
.
Ово је систем грана друге врсте али је то комплексна плоча прве врсте.
Други начин на који
се неки системи грана друге врсте могу да сведу на систем грана прве врсте састоји се у
замени простих грана имагинарним зглобовима.
Просте гране 3 и 4 утичу само на релативна померања грана 1 и 2 тиме што су спречена
померања у правцу тетива 1 и 2 односно 3 и 4. Гране 3 и 4 можемо да заменимо
(испрекидане линије) гранама 1 – А и 3 – А. Гране 1 и 2 се релативно померају само при
ротацији око тачке А, и то када је
δφ
1
различито
δφ
2
. Ако су померања при ротацији
управна на правац 1 и 2, односно 3 и 4, онда се формирањем имагинарног зглоба није
променио услов да се тачке 1 и 2, односно 3 и 4 релативно не померају у правац 1 и 2
односно 3 и 4. То је систем грана прве врсте са имагинарним зглобом. На сличан начин
уводимо појам система плоча прве врсте са имагинарним зглобовима.
15
Систем грана и систем плоча прве врсте са реалним и имагинарним зглобовима
представљају групу статички одређених плоча које ћемо у следећим звати плоче прве врсте.
Све остале статички одређене плоче су плоче друге врсте.
Ова подела може да се прошири и на статички одређене носаче у целини. То се лајо постиже
када се носач замени једном одговарајућом плочом. На тај начин што тло – земљу са
ослонцима и укљештењима на која је носач ослоњен или у којем је он укљештен
замењујемо једном плочом или једном граном. Према структури одговарајуће плоче носаче
делимо на носаче прве и носаче друге врсте. Носаче прве врсте делимо на системе грана и
системе плоча прве врсте са реалним или имагинарним зглобовима.
Кпресппдентна плпча

17
Непознате су
C
oi
, C
ui
, S
ik
, M
ik
, M
ki
. Унутрашње силе добијамо из услова равнотеже штапова
и њихових делова. Ову методу називамо методом чворова.
Метода декомпозиције,
У другој методи уклањањем ослонаца и укљештења и растављањем зглобова дати носач
распада на
Z
p
које су међусобно независне и слободне. Те плочепод утицајем спољашњег
оптерећења, реакција ослонаца и сила веза у зглобовима су у равнотежи.
Укупан број услова равнотеже је
3Z
p
из којих одређујемо
Z
o
– реакција,
Z
u
– момената,
2Z
z
–
сила веза у зглобовима. Сада сваку плочу растављамо на
систем грана и одређујемо силе веза између грана , а
затим и пресечне утицаје у било којој грани. Метода
чворова је у основи елементарнија јер у њој одређујемо
непосредно оне величине које су неопходне за
одређивање напона и деформација.
Код методе декомпозиције уводимо и силе везе у
зглобовима као непознате па је број непознатих већи
него у методи чворова. Међутим, метода декомпозиције
може да буде повољњија јер уместо једног система
симултаних једначина можемо добити више система
једначина са мањи бројем непознатих.
Која ће се од ових метода примењивати зависи од
структуре носача. И једна и друга метода су опште и у
њима може да се срачунају реакције ослонаца,
укљештења и силе у пресецима у сваком статички
одређеном носачу. Ипак, те методе примењујемо
углавном на носаче прве врсте код којих условне
једначине могу лако да се испишу и решавају.
Метода замене елемената,
Методу чворова и методу декомпозиције ијако су општем примењујемо углавном код
једноставнијих статички одређених носача прве врсте. Метод замене елемената користимо
за одређивање реакција ослонаца и сила у пресецима код сложених статички одређених
носача прве врсте као и код статичких одређених носача друге врсте. Овом методом
прорачун утицаја на датом носачу сводимо на прорачун утицаја у неком другом
једноставнијем носачу методом чворова или методом декомпозиције. При томе од задатог
носача прелазимо на замењујући носач који добијамо када из задатог носача уклонимо
одређени број елемената и заменимо их истим бројем нових елемената. Да би смо могли да
применимо метод замене елемената битно је да замењујући носач буде кинематички
стабилан и да се реакције ослонаца и силе у пресеку могу да одреде елементарним
статичким методама.
18
Реакције ослонаца и силе у пресецима услед задатих спољашњих сила у замењујућем
носачу нису једнаке утицајима у задатом носачу (у општем случају). Међутим, ако утицај
уклоњених елемената заменимо њиховим реакцијама тј., ако на замењујући носач поред
задатих сила нанесемо и реакције уклоњених елемената утицаји у замењујућем носачу биће
једнак утицајима у задатом носачу који је оптерећен само датим спољашњим силама.
1 1
2 2
1
...
n
o
n
n
o
k
k
k
Z
Z
X Z
X Z
X Z
Z
X Z
,
где је;
Z
– неки од утицаја (реакција ослонаца, моменат укљештења или сила у неком
пресеку у датом носачу услед спољашњих сила),
Z
o
– утицај
Z
у земењујућем носачу услед датих спољашњих сила,
Z
k
– утицај
Z
при
X
k
=1.0 (k=1,2,…, n).
Горњи израз се може исписати и за замењене утицаје
Y
1
,Y
2
, ...Y
n
, у оним елементима у
којима су замењени уклоњени елементи.
1 1
2 2
...
0
i
io
i
i
n in
Y
Y
X Y
X Y
X Y
,
или у развијеном облику,
10
1 11
2 12
1
...
0
n
n
Y
X Y
X Y
X Y
,
20
1 21
2 22
2
...
0
n
n
Y
X Y
X Y
X Y
,
. . . . . . . . .
. . . . . . . . .
0
1 1
2
2
...
0
n
n
n
n nn
Y
X Y
X Y
X Y
.
Услов у овим једначинама да je det
0
D
. Значи, методу замене елемената користимо
уједно као и методу којом се недвосмислено може утврдити да ли је један систем друге
врсте кинематички стабилан или није.

2
Реакцију
„Б“
одређујемо тако да алгебарски збир момената свих сила у односу на тачку
„а”
једнак нули.
Случај када је резултанта паралелна са реакцијом
„Б“
, тада је и реакција
„А“
паралелна са резултантом, односно са реакцијом
„Б“
.
Примери носача који се састоји од једне кинематички круте плоче
Проста греда
Прав носач који се састоји од једне кинематичке круте плоче који је на једном крају ослоњен
на непокретно а на другом крају на покретно лежиште назива се проста греда.
Основна карактеристика овог носача је да за вертикално оптерећење увек има вертикалне
реакције.
3
Одређивање силе у пресецима просте греде
1.
Аналитички поступак
2.
Графички поступак
5
У таблицама су дате вредности функција функције
„τ
F
“
и
„ω
F
“
, као и
„τ
F
I
“
и
„ω
F
I
“
за
основне облике оптерећења у десетинама односно дванаестинама распона греде.
Концентрисане силе
6
Замена расподељеног оптерећења статички еквивалентним системом
концентрисаних сила
1.
Линеарна расподела оптерећења
8
Конзола
Прав носач који се састоји од једне кинематички круте плоче и која ја на једном крају
непокрено укљештена назива се конзола. Под термином ослонац подразумевамо
конструктивни елемент који спречава померање одређене тачке у одређеном правцу.
Ослонци и укљештења називају се спољашњи елементи носача.
Пресечне силе у пресеку „s“ дате су изразима:
Греда са препустима
Прав носач који се састоји од једне кинематички круте плоче који је ослоњен на покретно и
непокретно лежиште и код кога ослонци нису на крајевима носача називамо греда са
препустима. Овај носач као основну карактеристику има као и проста греда да за
вертикално оптерећење даје увек вертикалне реакције. Прорачун овог носача, утицаја у
њему, и конструкција утицајних линија своди се на комбинацију просте греде и конзоле.
1
СТАТИКА КОНСТРУКЦИЈА
Писано предавање 6 и 7
Припремио: Доц. др Илија М. МИЛИЧИЋ, дипл.инж.грађ.
ТЕМА:
НОСАЧИ КОЈИ СЕ САСТОЈЕ ОД ДВЕ И ВИШЕ КИНЕМАТИЧКИ КРУТЕ
ПЛОЧЕ,
Лук на три зглоба,
Лук на три зглоба од којих је један имагинаран
Герберов носач,
Лук са затегом,
Ланчани системи
Носачи који се састоје од две кинематичке круте плоче
Када се носач састоји од две кинематички круте плоче тј., када је
Zp=2
,
Zz=1
, из услова
спољашње кинематичке стабилности следи да је
3Zp=2Zz+Zu+Zo
, односно
Zo+Zu=4
. Значи
укупан број спољашњих елемената може бити распоређен на два начина:
1.
на првој плочи имамо три спољашња елемента, а на другој један, и обрнуто
2.
На обе плоче по два спољашња елемента.
Између броја ослонаца и броја укљештења могуће су следеће три комбинације:
Zo=4
Zu=0,
Zo=3
Zu=1,
Zo=2
Zu=2,
Основни облици ослањања плоче приказани су на сликама
а, б, ц, д, е, ф
, и
г
.

3
Овакви носачи се битно разликују од гредних система, а њихове основне карактеристике су:
Реакције ослонаца су косе и при вертикалном оптерећењу
Увек постоје нормалне силе које могу бити доминантне за димензионисање,
Облик ових носача може се подесити тако да се при неком оптерећењу појављују само
нормалне силе (скоро увек силе притиска) па су овакви системи погодни за конструкције
од камена и бетона.
Реакције носача са три зглоба
Произвољно оптерећење
Правац а – б, се назива правац лучне силе
Хоризонтална пројекција правца а – б, назива се распон лука
Вертикално одстојање зглоба (g) од правца лучне силе назива се стрела лука (f).
Оса лука дефинише се ординатама
y
c
,
вертикалним одстојањима тачака осе лука и
правца лучне силе.
Компоненте реакција
А
и
Б
, одређујемо разлагањем графичког полигона сила:
Из услова
Ма
1+2
= 0
, и
Мб
1+2
= 0
,
?′
?
= −
?
?
?
?′
?
=
?
?
?
Силе
Ha, Ha’
,
Hb, Hb’
одређујемо из услова:
М?
1
= 0
, и
М
?
2
= 0
Када су одређене реакције
А
и
Б
из услова
? = 0
и
? = 0
за плочу
I
или
II
одређују се
компоненте сила у зглобу –
Hg, Vg.
Графички поступак
4
Начин одређивања компоненти реакција заснива се на принципу суперпозиције. Према
томе, реакције се одређују прво као да се оптерећење прво налази на једној плочи, затим
исто то само на другој плочи. На крају се једноставним супенпонирањем утицаја једног и
другог прорачуна добија решење за цели систем и дато оптерећење.
Вертикално оптерећење
За вертикално оптерећење које делује на лук на три зглоба реакције
Va'
,
Vb'
једнаке су
реакцијама просте греде, док су хоризонталне реакције међусобно једнаке.
Равномерно оптерећење
Равнотежно оптерећење силама
Va’=Vb’=0
Ha’=Hb’=H’
Равнотежно оптерећење моментима
Va’=Vb’=0
Ha’=Hb’=H’
Произвољно оптерећење само на једној плочи

6
Носачи на три зглоба од којих је један имагинаран
Посматраћемо носач на скици који се састоји од четири плоче. Плоче
I
,
II
, ослоњене су на
непокретна лежишта, а међусобно су везане простим плочама
III
,
IV
чије тетиве се секу у
имагинарном зглобу „
g
“. Критеријум
3Zp=2Zz+Zo+Zu
је задовољен па је носач статички
одређен. Тако у
4х3=12
услова равнотеже, улазе
4
непознате реакције ослонаца и
2х4=8
компоненти непознатих сила у зглобовима.
Из услова равнотеже за
плочу
III
, имамо силе у правцу тетиве и тангенте:
Из услова равнотеже за
плоча
IV
, имамо силе у правцу тетиве и тангенте:
Из услова равнотеже носача као целине
За
плочу
I
, из услова
ΣH=0
, и
ΣV=0
, следе наредне две једначине:
Ако плоче
III
, и
IV
нису оптерећене, онда имамо ове две једначине да постају као и код
нормалног лука на три зглоба:
7
Герберов носач – појам
Герберов носач је праволинијски систем састављен од ланца плоча међусобно ослоњених
на ослонцима који су распоређени по одређеном критеријуму. Укупан број зглобова мора
бити
Zz=4
, тако да у једном пољу не буду
три
нити
два
по
два
у суседним пољима.
Распоред зглобних веза
Замислимо да смо систем раставимо на „
n
“ зглобова и „
n+1
“ поља тада добијамо „
n+1
“
плоча. За сваку од плоча можемо поставити три услова равнотеже, тако да имамо укупно
3(n+1)
услова равнотеже. У овим условима поред задатих активних сила фигурише и још
„
n+3
“ непознатих реакција ослонаца, као и „
2n
“ компоненти сила у зглобовима.
Како је
3(n+1)=n+3+2n
, то је број услова равнотеже једнак броју непознатих.
Рационалан положај зглобова на једном ланцу плоча – Герберовом носачу је:

9
С обзиром да је
Zo+Zu=Zp+2
, тада постоје две могућности:
1.
Једна плоча је ослоњена на три ослонца, а све остале на један ослонац, и
2.
Две плоче у ланцу су ослоњене на по два ослонца, а све остале на један ослонац.
Ослонци могу бити замењени укљештењима, али на једној плочи не могу бити два
укљештења. Ове две могућности су приказане на Сл. ц и Сл. д.
Из свега напред наведеног закључује се да, сви носачи који се састоје из ланца плоча су
носачи прве врсте са реалним или имагинарним зглобовима.
Статички одређени оквири
Овде ће се разматрати затворени и вишеспратни оквири које добијамо од једне гране
сукцесивним додавање по две међусобно независне спојене гране, од којих се свака везује
са по једном предходно везаном граном. Другим речима, то су оквири који представљају
ланац од парова зглавкасто везаних грана.
Силе
V'
m+1
и
V’
(m+1)
одређујемо из услова равнотеже дела ланца с једне стране пресека кроз
зглобове
(m+1)
и
m+1
:
10
Хоризонталне компоненте сила у зглобовима одређујемо на основу рекурзивног обрасца
добијеног из услова да су моменти у односу на зглоб „
m
“ свиг грана
A
, и грана
B
, да су
једнаки нули, одакле следи:
Када су одређене силе
V'
m+1
и
V’
(m+1)
и силе
H
m+1
и
H
(m+1)
као и
V
m+1
и
V
(m+1)
имамо да је:
Носачи са затегом
Висећи мост и слични системи
а) Висећи (ланчани) мост,
б) Лук укрућен гредом
ц) Лангерова греда
д) Армирана греда

2
Битна карактеристика
Сваком штапу осим допунском одговара
пресек
који укључујући посматрани штап
сече и три штапа која се не секу у једној тачки и ако и плочу делимо на два независна
дела такве решеткасте плоче називамо плоче са простом испуном.
Постоје и други решеткасти носачи као решеткасти носачи са секундарном испуном,
"к – испуном" и сложеном испуном.
Метода чворова
Код решеткастих носача оптерећење се преноси увек (уколико се другачије не нагласи)
преко чворова. Тада су
Т=0
и
М=0
.
Нормалне силе постоје и оне се називају силе у штаповима.
Код таквог носача непознате су:
Реакције ослонаца....
Zo
Силе у штаповима…
Zs
Ако је испуњен услов
Zs+Zo=2K
, онда се за сваки чвор могу исписати два услова равнотеже,
и из тих услова експлицитно решити реакције свих ослонаца и силе у свим штаповима.
Када се аналитички примени метода чворова добија се велики број симултаних једначина.
По дефиницији код решетки прве врсте постоји бар један прост чвор (у коме су везана бар
3
два штапа). Тако се одређују једине две непознате у том чвору. У сваком следећем чвору
везана су само по два чвора па се из услова равнотеже срачунавају нове непознате у њима и
тако редом.
Постоји шест могућности:
1.
Ако су у чвору везана само два штапа и чвор није оптерећен тада су силе у њима једнаке
"
0
",
2.
У чвору су везана два штапа и чвор је оптерећен, силе у штаповима добијају се
разлагањем оптерећења на компоненте које су колинеарне са правцем штапова,
3.
У чвору су везана три штапа и чвор није оптерећен, а два штапа су колинеарна, онда су у
колинеарним штаповима силе једнаке а у трећем је "
0
",
4.
У чвору су везана три штапа од којих су два колинеарна и чвор је оптерећен, оптерећење
у чвору разлажемо на компоненте од којих је једна у правцу колинеарних штапова а
друга у правцу трећег штапа. Силе у колинеарним штаповима међусобно се разликују за
компоненту спољашњег оптерећења у њиховом правцу. Сила у правцу трећег штапа
једнака је компоненти спољашњег оптерећења.
5.
Ако су
4
штапа везана у не оптерећеном чвору, и ако су два и два штапа колинеарни, тада
су силе у колинеарним штаповима једнаке,
6.
Ако су
4
штапа везана у чвору од којих су два и два колинеарно везана у оптерећеном
чвору, силе у колинеарним штаповима међусобно се разликују за компоненту
спољашњег оптерећења у том правцу.
Поступак: Максвел – Кремонин план сила
Овакав начи обележавања назива се БОВ – ов начин обележавања.
1.
Сваком темену фигуре одговара један полигон сила,
2.
Број страна једне фигуре једнак је броју правих у одговарајућим теменима друге
фигуре
3.
Такве фигуре називају се реципрочне фигуре.

5
Аналитички изрази за силе у штаповима решетке са троугаоном испуном
Код решеткастих носача штапови носе увек ознаку десног чвора. Ако је штап горњег појаса
онда се обележава обично словом "
О
", а ако је штап доњег појаса обележава се "
U
".
Дијагонале словом "
D
", а вертикале када их има словом "
V
". Углови које штапови заклапају
са хоризонталом обележавамо са "
" ако је горњи појас, "
" доњи појас, и са "
" ако је
дијагонала. Ознака угла увек има и ознаку одговарајућег штапа.
Из услова
ΣМ
m+1
=0
, имамо:
?
?
=
?
?−1
ℎ
?−1
∙
1
????
?
Из услова
ΣМ
m
=0
, имамо:
О
? +1
= −
?
?
ℎ
?
∙
1
????
?+1
Из услова
ΣН
лево
=0
, дијагонала која пада слева на десно:
6
Из услова
ΣН
десно
=0
, следи дијагонала која пада с десна на лево:
Решетка са вертикалама
Из услова
ΣМ
m
=0
, имамо:
Из услова
ΣМ
m-1
=0
, имамо:
Из услова
ΣН
лево
=0
, дијагонала која пада слева на десно:
8
Решетке са правим паралелним и хоризонталним појасевима
Из услова
ΣМ
m
-1
=0
, имамо:
Из услова
ΣМ
m
=0
, имамо:
Силе у штаповима испуне добијамо из услова да су збирови вертикалних компоненти свих
сила лево односно десно од пресека “
t
m
” и “
t
” једнаки нули.
Одакле следи, да су:
1
СТАТИКА КОНСТРУКЦИЈА
Писано предавање 9 и 10 и 11
Припремио: Доц. др Илија М. МИЛИЧИЋ, дипл.инж.грађ.
ТЕМА:
ВЕЗА МОГУЋЕГ РАВНОТЕЖНОГ СТАЊА И МОГУЋЕГ СТАЊА
ДЕФОРМИСАЊА (ТЕОРЕМЕ УЗАЈАМНОСТИ)
Да се подсетимо:
Услови равнотеже
Елемента штапа
Чворова носача
Деформација носача
Везе померања, обртања и деформацијских величина
Услови компатибилности померања чворова носача
Деформацијски независне величине штапа

3
Веза између могућег стања равнотеже и могућег стања деформација
Принцип виртуалних померања
Када се у једначину за могуће равнотежно стање унесе оптерећење и силе у пресецима које
се стварно јављају, а утицај могућег стања деформисања обележимо са цртом називамо
принципом виртуалних померања.
Принцип виртуалних сила:
Другачије, када уместо могућег стања деформисања унесемо померања и и деформацијске
величине које се стварно дешавају, онда овакав утицај могућег равнотежног стања зове се
принцип виртуелних сила.
Принцип виртуалних померања за еластичан систем:
Агебарски збир радова свих спољашњих и унутрашњих сила једног равнотежног система
при било ком виртуалном померању система једнак је нули.
Принцип виртуалних померања за систем крутих тела:
Агебарски збир радова свих спољашњих сила које на систему крутих тела (систем штапова)
стоје у равнотежи, при било ком виртуалном померању система и једнак је нули.
4
Теореме узајамности
1.
Теорема о узајамности радова, (Betti – јева теорема)
Из принципа виртуалних померања, имамо да је:
Односно ако предпоставимо да су:
Следи да је:
Из принцип виртуалних сила
Односно ако предпоставимо да су:
Следи да је:
Према томе, како су десне стране ових једначина једнаке, мора да су једнаке и леве стране, и
отуда имамо да је:
Ако на носач делују два система спољашњих сила, рад спољашњих сила
P
m
и
C
i
првог
система при померањима која изазива други систем једнак је раду спољашњих сила
P
n
и
C
i
другог система при померањима који изазива први систем утицаја.
6
4.
Теорема о узајамности реакција и померања, (Друга Rayleigh – јева теорема)
Реакција ослонца
1
услед јединичне силе
Р
једнака је негативној вредности померања
нападне тачке силе
Р
у правцу те силе услед јединичног померања ослонца
1
.
Примена принципа виртуалних сила за одређивање померања
Генералисано померање

9
Дијаграм померања пуних носача
Применом принципа витруалних сила одређујемо померања и обртања у одређеном броју
(коначних) дискретних тачака. Међутим, врло често захтева се дијаграм померања
одређеног потеза штапова у унапред одређеном правцу. Тада је поступак за одређивање
дијаграма померања другачији.
? ∙ ?? = ?? ∙ ???? + ?? ∙ ????
/
????
/
????
? ∙ ?? = ?? ∙ ???? − ?? ∙ ????
/
????
/
????
?? = ? ∙ ?? ∙ ???? + ? ∙ ?? ∙ ????
?? = ? ∙ ?? ∙ ???? − ? ∙ ?? ∙ ????
?? = ?? ∙ ????
→ ?? = ? ∙ ?? + ? ∙ ??
?? = ?? ∙ ????
→ ?? = ? ∙ ?? − ? ∙ ??
Придружимо и још једну једначину
? ? − ?
?
= −? ∙ ??
Изоставимо хоризонтална померања, имамо да је;
?? = ? ∙ ?? + ? ∙ ??
/
??
? ? − ?
?
= −? ∙ ds
/
dx
Једначине постају,
??
??
= ? ∙ ??? + ? − ?
?
+ ?
?
?(? − ?
?
)
??
=
−?
??
??
= −
?
????
Размотримо сада ј – не,
?? = ? ∙ ?? − ? ∙ ??
,
?? = ? ∙ ?? + ? ∙ ??
,
? ? − ?
?
= −? ∙ ??
Да би одредили у њима померања “
u
”
и “
v
” и обртања “
φ
” треба да се
изврши интеграција истих у којима
су подинтегралне величине функције
“
ε
” “
?
” и “
?
?
”.
У највећем броју случајева оне су
компликоване функције координата
тачака осе штапа, па је и интеграција
истих компликован посао, а често
бива и немогућ. Значи, интеграцијом
решавамо само врло једноставне
случајеве ових функција познате из
отпорности материјала. Да би се и
овај практичан проблем решили
користимо аналогију која постоји
између диференцијалних једначина
за померање тачака осе штапа и услова равнотеже елемента правог штапа. Та се аналогија
назива статичко – кинематичака аналогија штапа.
10
? = 0
,
?
?
− ?
?
∙ ?? − ?
?
− ??
?
= 0
??
?
??
= −?
?
?
?1
= 0
?
?
+ ?
?
∙ ?? + ?
?
∙ ?? − ?
?
− ??
?
= 0
??
?
??
= ?
?
+ ?
?
И ако је сада,
?
?
=
?
????
?(? − ?
?
)
??
=
??
?
??
→ ? − ?
?
= ?
?
?
?
= ? ∙ ??? + ?
?
??
??
=
??
?
??
+ ?
?
? = ?
?
?
?
=
?
????
=
?
??
+ ?
?
∙
∆?
?
∙
1
????
?
?
= ? ∙ ??? + ?
?
=
?
??
+ ?
?
∙ ? ∙ ??? + ? ∙
?
??
Померање “v” датог штапа услед спољашњих утицаја једнака су моментима
"?
?
"
, а
обртања “
(? − ?
?
)
“ једнака су трансверзалним силама фиктивног правог штапа
оптерећеног фиктивним расподељеним силама и фиктивним расподељеним моментима.
Еластичне тежине
Када је фиктивно оптерећење компликовано утицаје
?
?
?
?
одређујемо нумеричким
поступцима. Оптерећење
?
?
?
?
замењујемо концентрисаним силама у уоченом низу
тачака у којима тражимо померања и обртања. Те силе називамо еластичне тежине.
Најчешће поступамо тако што фиктивно оптерећење изражавамо путем израза:
?
?
?
=
?
??
∙
1
????
?
∆?
?
= ?
?
∙
∆?
?
∙
1
????

12
фиктивног носача редовно одређујемо као померања или обртања стварног носача
применом принципа виртуалних сила .
13
У случајевима када је број степени слободе померања фиктивног носача једнак броју
статичке неодређености задатог носача, онда се фиктивни носач може искористити за
решавање статички неодређених величина задатог носача.
?
?
∙
?
2
∙
2
3
∙ ? −
? ∙ ?
2
8
∙
?
2
= 0
?
?
=
3
16
∙ ? ∙ ?
Решеткасти носачи

1
СТАТИКА КОНСТРУКЦИЈА
Писано предавање 12 и 13 и 14
Припремио: Доц. др Илија М. МИЛИЧИЋ, дипл.инж.грађ.
ТЕМА:
МЕТОДА СИЛА – УСЛОВИ РАВНОТЕЖЕ НОСАЧА, СТАТИЧКИ
НЕОДРЕЂЕНЕ ВЕЛИЧИНЕ, ОСНОВНИ СИСТЕМ И УСЛОВНЕ
ЈЕДНАЧИНЕ И ПОМЕРАЊА ТАЧАКА НОСАЧА
Да бисмо исписали услове равнотеже носача замислимо да смо кружним пресецима
исекли све чворове и тиме носач раставили на
Zs
независних штапова и
К
независних
чворова. Утицај штапова на чворове и обрнуто, замењујемо силама и моментима на
крајевима штапова. Под утицајем спољашњих сила и сила у пресецима систем штапова и
систем чворова су у равнотежи. Из услова равнотеже штапова могу да се срачунају силе и
моменти на крајевима штапова, тј. да се прикажу у функцији оптерећења и статички
независних величина
X
1
X
2
,
X
3
.
N
ik
=S
ik
+R
x
/
2
(1)
N
ki
=S
ki
+R
x
/
2
(2)
T
ik
=(M
ik
– M
ki
)/l
ik
+R
y
ξ
R
’
(3)
T
ki
=(M
ki
– M
ik
)/l
ik
– R
y
ξ
R
(4)
Једначинама (1) – (4) су силе на крајевима штапа приказане у функцији момената
M
ik
,
M
ki
и силе
S
ik
.
Услови равнотеже сила и момената у чвору гласе:
?
??
∙ ????
??
− ?
??
∙ ????
??
+ ?
??
∙ ????
?
+ ?
??
= 0
?
??
∙ ????
??
+ ?
??
∙ ????
??
+ ?
??
∙ ????
?
+ ?
??
= 0
?
??
+ ?
??
+ ?
?
= 0
(5)
2
Када у једначине (5) за
N
ik
унесемо вредност која је дата једначином (1), а за
T
ik
вредност
која је дата једначином (3)
,
оне могу да се напишу у облику:
?
??
⋅ ????
??
−
?
??
− ?
??
?
??
∙ ????
??
+ ?
??
∙ ????
?
+ ?
?
= 0
?
??
⋅ ????
??
+
?
??
− ?
??
?
??
∙ ????
??
+ ?
??
∙ ????
?
+ ?
?
= 0
?
??
+ ?
??
+ ?
?
= 0
(6)
Где је:
?
?
= ?
??
+
1
2
?
?
∙ ????
??
− ?
?
∙ ?
?
′
∙ ????
??
?
?
= ?
??
+
1
2
?
?
∙ ????
??
+ ?
?
∙ ?
?
′
∙ ????
??
(7)
Услови (6) у којима су све непознате унутрашње силе приказане у функцији статичких
независних величина штапова су тражени услови равнотеже носача. Према томе укупан
број услова равнотеже носача једнак је
2K + m
. У њима је непознато:
Zo
– реакција ослонаца
C
oi
,
Zu
– момената укљештења
C
ui
,
Zs
– сила
S
ik
,
Z
k
+ m
— момената
M
ik
и
M
ki
.
Преглег могућих варијанти броја непознатих и броја једначина:
Статички неодређеним носачима
називамо носаче код којих се реакције ослонаца,
моменти укљештења и силе у пресецима не могу одредити само из услова равнотеже тог
носача, односно када је број непознатих статичких величина већи од броја једначина
равнотеже чворова носача.
брпј неппзнатих
Статички пдређени нпсачи:
брпј једначина
Статички непдређени нпсачи:
Статички препдређени нпсачи:
Статички неодређеним носачима
називамп нпсаче кпд кпјих се реакције
пслпнаца, мпменти укљештеоа и силе у пресецима не мпгу пдредити самп из
услпва равнптеже тпг нпсача, пднпснп када је брпј неппзнатих статичких
величина већи пд брпја једначина равнптеже чвпрпва нпсача.

4
оптерећењем
p
, а када су све статички неодређене величине носача једнаке нули. Кратко
ћемо то равнотежно стање у следећем звати стање
X
i
= 0
. Величине
C
j,m
, M
ik,m
, S
ik,m
, (за
m
= 1, 2, . . . n
)
су
реакције ослонаца, моменти укљештења и статички независне величине
штапова
n
међусобно независних равнотежних стања неоптерећеног носача, тј.
n
међусобно независних унутрашњих равнотежних стања носача. При сваком од ових стања
је једна од статички неодређених величина једнака јединици а све остале једнаке нули.
Кратко ћемо та стања звати стање
X
1
= 1
, стање
X
2
= 1
.... стање
X
n
= 1
. Такође и силе у
произвољном пресеку носача могу да се прикажу као линеарне функције статички
неодређених величина у облику:
0
1 1
2
2
0
1 1
2 2
0
1
1
2
2
......
,
......
,
......
,
n
n
n n
n
n
N
N
X N
X N
X N
T
T
X T
X T
X T
M
M
X M
X M
X M
(10)
При чему су:
0
0
0
1 1
1
2
2
2
, ,
;
, ,
;
, ,
;
.................
, ,
,
n
n
n
N T M
N T M
N T M
N T M
(11)
силе у пресецима стања
X
i
= 0
, односно силе у пресецима унутрашњих равнотежних
стања
X
1
= 1
,
X
2
= 1
до
X
n
= 1
.
Ако уместо произвољних линеарних функција непознатих
C
j,
S
ik
, M
ik
, за статички
неодређене величине изаберемо неке од непознатих спољашњих или унутрашњих сила,
односно ако за статички неодређене величине изаберемо одређене компоненте реакција
спољашњих или унутрашњих веза носача, једначине (9) и (10) имају једноставна статичка
значења, на основу којих оне могу лако да се испишу. Реакције и силе у пресецима
равнотежног стања
X
i
= 0, C
j,0
, S
ik,0
, M
ik,0
, односно
N
0
, T
0
, M
0
, представљају тада реакције и
силе у пресецима које оптерећење
p
изазива у оном статички одређеном носачу који
добијамо када из датог статички неодређеног носача уклонимо везе чије смо реакције
изабрали за статички неодређене величине, а реакције и силе у пресецима равнотежног
стањa
X
m
= 1, C
j,m
, S
ik,m
,
M
ik,m
односно
N
m
,
T
m
,
M
m
,
представљају реакције и силе у пресецима
тог статички одређеног носача када на њега, као спољашње оптерећење, делује само сила
X
m
= 1.
Систем који добијамо када из датог статички неодређеног носача уклонимо везе чије смо
реакције изабрали за статички неодређене величине називамо основни систем тог носача.
Реакције и силе у пресецима равнотежног стања
X
i
= 0
представљају утицаје у основном
систему услед оптерећења
p
, а реакције и силе у пресецима унутрашњег равнотежног стања
X
m
= 1
датог носача представљају утицаје у основном систему када је он оптерећен само
силом
X
m
= 1
.
Утицаји у основном систему биће једнаки утицајима у датом статички неодређеном систему
када у њему уклоњене везе заменимо њиховим реакцијама
X
1
до
X
n
. Овај став следи из
једначина (9) и (10) и обрнуто, те једначине могу да се напису полазећи од овог става.
Утицаји у статички неодређеном носачу на левој страни једначина (9) и (10) једнаки су
одговарајућим утицајима у основном систему на десној страни тих једначина који су,
сагласно принципу суперпозиције, приказани као збир утицаја од оптерећења
p
и сила
X
1
5
до
X
n
. На пример, реакција
C
j
статички неодређеног носача једнака је алгебарском збиру
реакција основног система,
C
j0
од оптерећења и од сила
X
1
до
X
n
.
За формирање основног система стоје нам на расположењу четири основне могућности
приказане на слици 1.
Прво, да из датог носача уклонимо неки од његових ослонаца и тиме
ослоњеном чвору омогућимо померање у правцу ослонца. Статички
неодређена величина је тада реакција ослонца, слика 1
а
.
Друго, да из датог носача уклонимо неко од његових укљештења и тиме
укљештеном пресеку омогућимо обртање. Статички неодређена величина је
тада моменат уклештења, слика 1b.
Треће, да у неком пресеку датог носача круту везу заменимо зглавкастом везом
и тиме деловима лево и десно од тог пресека омогућимо релативно обртање.
Статички неодређена величина је тада пар момената – моменат савијања у том
пресеку носача, слика 1c.
Четврто, да у неком пресеку датог носача круту везу заменимо клизајућим
зглобом и тиме деловима лево и десно од тог пресека омогућимо релативно
транслаторно померање у правцу који заклапа угао
α
са осом штапа. Статички
неодређена је тада пар сила – компонента резултанте унутрашњих сила у том
пресеку носача, а у правцу у коме је омогућено померање, слика 1d. За
α
= 0
клизајући зглоб прелази у подужни зглоб, а статички неодређена је нормална
сила у посматраном пресеку, а за
α
=
π
/2
клизајући зглоб постаје попречни
зглоб, а статички неоређена је трансверзална сила у том пресеку.
При формирању основног система неког вишеструко статички неодређеног носача у
једном пресеку може да се уклони и више од једне везе. У том случају утицај уклоњених
веза замењујемо одговарајућим бројем статички неодређених величина. На пример, крута
веза у пресеку штапа на слици 2
а
може да се замени везом на слици 2b преко које може да
се пренесе само трансверзална сила у том пресеку. Статички неодређене величине на том
месту су моменат савијања
X
1
и нормална сила
X
2
. Ако у посматраном пресеку уклонимо
све везе, тј. ако штап на том месту потпуно пресечемо, статички неодређене величине су
моменат савијања и резултанта унутрашњих сила у том пресеку која је тада непозната и по
величини и по правцу. Ову резултанту замењујемо њеним компонентама. Обично су то
компоненте у правцу осе и управно на правац осе, тј. нормална и трансверзална сила у том
пресеку, слика 2c. Некада је корисно да за статички неодређене силе изаберемо и неке
друге компоненте резултанте унутрашњих сила, на пример, компоненте које добијамо
разлагањем те силе у правцу осе штапа и на правац који са осом заклапа угао
α
,
слика 2d.

7
Када у ову једначину за
κ
,
i
T
(деформацијске величине које се у носачу стварно јављају)
унесемо вредности дате изразима:
,
,
o
o
t
t
T
M
t
N
T
t
k
EI
h
EF
GF
(2)
а затим за
N
,
T
i
M
, са вредности:
,
,
n
n
n
0
k
k
0
k k
0
k
k
k 1
k 1
k 1
N
N
X N
T
T
X T
M
M
X M
(3)
добијамо:
,
o
n
ji
j
i
0
k
k
t
k 1
s
n
n
o
i
0
k
k
t
i
0
k
k
k 1
k 1
1
t
C c
M
M
X M
EI
h
1
k
N
N
X N
t
T
T
X T
ds
EF
GF
(4)
Односно, даљом трансформацијом:
Из ове једначине за
i
= 1, 2, ...
n
добијамо систем од
n
једначина са
n
непознатих
X
1
до
X
n
. Овај систем једначина представља условне једначине за статички неодређене величине са
ознакама:
И ознаком,
?
?⊗
= ?
?0
+ ?
??
+ ?
??
(7)
8
Оне могу да се напишу краће у облику:
?
?
?
?=1
∙ ?
??
+ ?
?⊗
= 0, ? = 1,2, … , ?
(8)
Или у развијеном облику:
?
1
∙ ?
11
+ ?
2
∙ ?
12
+ ⋯ + ?
?
∙ ?
1?
+ ?
1⊗
= 0
?
1
∙ ?
21
+ ?
2
∙ ?
22
+ ⋯ + ?
?
∙ ?
2?
+ ?
2⊗
= 0
…. ….. ….. ….. ….. ….. ….. ….. ….. …… ….
?
1
∙ ?
?1
+ ?
2
∙ ?
?2
+ ⋯ + ?
?
∙ ?
??
+ ?
?⊗
= 0
(9)
Решеткасти носачи
За решеткаст носач чији штапови примају само аксијалне силе, принцип виртуалних сила
написана за унутрашње равнотежно стање
X
i
= 1 гласи:
?
??
∙ ?
?
= ?
?
∙ ? ∙ ?? = ?
?
∙ ? ∙ ??
?
?
?
Односно,
?
??
∙ ?
?
= ?
?
∙ ∆?
?
(17)
Где је са
S
i
обележена аксијална сила у произвољном штапу решетке при стању
X
i
=1
, а са
Δl
стварна промена дужине штапа:
∆? =
? ∙ ?
??
+ ?
?
∙ ? ∙ ?
(18)
При чему сила у штапу
S
датог статички неодређеног носача услед датих спољашњих
утицаја може, сагласно једначинама (4), да се прикаже у облику:
? = ?
?
+ ?
?
∙ ?
?
?
?=1
(19)
Из једначина (17), (18), (19) добијамо:
?
??
∙ ?
?
= ?
?
∙
?
??
∙ ?
0
+ ?
?
∙ ?
?
?
?=1
+ ?
?
∙ ? ∙ ?
?
?
Односно:
?
?
∙
?
?
∙ ?
?
??
∙ ?
?
+
?
?
∙ ?
0
??
∙ ?
?
+ ?
?
∙ ?
?
∙ ? ∙ ? − ?
??
∙ ?
?
?
?
(20)
i= 1, 2, …, n

10
Када је статички неодређена реакција неког ослонца, одговарајуће генералисано померање
је компонента померања ослоњене тачке носача у правцу ослонца слика 1
a,
а када је
статички неодређена аксијална сила (пар сила) ослоначког штапа генералисано померање
је релативно померање те тачке у односу на опорац, слика l
b
.
Када је статички неодређен моменат неког укљештења, одговарајуће генералисано
померање је обртање укљештеног пресека, слика 1
c
, а када је статички неодређен моменат
савијање (пар момената) у укљештеном пресеку носача, генералисано померање је
релативно обртање тог пресека у односу на опорац, слика 1
d
.
Када је статички неодређен моменат савијања у пресеку, одговарајуће генералисано
померање је релативно обртање бесконачно блиских пресека с једне и друге стране
пресека, слика 1
e
, а када је статички неодређена компонента резултанте унутрашњих сила
у пресеку, а у правцу који са осом носача заклапа угао
α
, генералисано померање је
релативно транслаторно помeрање бесконачно блиских пресека у том правцу, слика 1
f
.
У датом статички неодређеном носачу ова померања једнака су нули. Изузетак би била
само померања еластичних ослонаца и обртања еластичних укљештења, али њих
избегавамо тиме што уместо реакција еластичних ослонаца и укљештења, за статички
неодређене уводимо силе ослоначких штапова и моменте савијања у укљештеним
пресецима.
У основном систему датог носача ова померања различита су од нуле. Померања
δ
ko
,
δ
kt
,
δ
kc
,
δ
ki
, k =
1, 2, . . .,
n
од оптерећења, температурних промена, померања ослонаца и сиlа
X
k
= 1
,
k
= 1, 2, . . .
n,
сагласно изразима за померања која су изведена у поглављу 3.3.1 дата су
једначинама (6). Услови да су померања
δ
i
,
i
= 1, 2, . . .
n
, у датом носачу једнака нули, на
основу једначине (29) могу да се напису у облику:
?
?
?
?=1
∙ ?
??
+ ?
?⊗
= 0, ? = 1,2, … , ?
Тиме смо дошли до условних једначина за статички неодређене величине, које се од
једначина (8) разликују само по томе што величине
X
k
,
δ
ik
,
?
?⊗
,
имају ужа и конкретнија
значења.