Универзитет у Крагујевцу
ФАКУЛТЕТ ТЕХНИЧКИХ НАУКА
ЧАЧАК
МАСТЕР РАД ИЗ ПРЕДМЕТА
РЕГУЛАЦИЈА ЕЛЕКТРОМОТОРНИХ ПОГОНА
КОНФИГУРАЦИЈЕ
ЕНЕРГЕТСКИХ ПРЕТВАРАЧА У
ЕЛЕКТРОМОТОРНИМ ПОГОНИМА И
ТЕХНИКЕ МОДУЛАЦИЈЕ
Ментор:
Кандидат:
Др Марко Росић
Милош Попов 851/2017
У Чачку, 2018. године

Конфигурације енергетских претварача у електромоторним погонима
3
2. УЛОГА И ЗАДАЦИ ЕНЕРГЕТСКИХ ПРЕТВАРАЧА У
ЕЛЕКТРОМОТОРНИМ ПОГОНИМА
У области енергетске електронике, посебну важност имају енергетски претварачи.
Постоји више дефиниција претварача. Под претварачем ће бити подразумеван уређај који
помоћу снажних полупроводничких компонената, на контролисан начин може да претвара
енергију из једног електричног система у други. Ова два електрична система могу да имају
различит карактер: системи наизменичне струје ((AC)- eng.
Alternating current
) или системи
једносмерне струје ((DC)- eng.
Direct current
), различите величине, облике и фреквенције
напона и струја, број фаза итд [1].
Следећа карактеристика ових претварача је да се ради о статичким уређајима (без
покретних делова) тако да нема: инерције, хабања, замора, старења и сл.
У односу на друге уређаје сличне снаге, тиристорски претварачи су мањи, лакши,
јефтинији итд. Њихова предност је лако управљање и компатибилност са другим
електронским уређајима.
Свакако да осим регулације брзине електромотора и примене у електромоторним
погонима, постоје и друге примене претварача снаге. Данас они налазе примену у готово
свим областима, почев од домаћинства (кућни апарати, осветљење, итд), преко
аутоиндустрије (уређаји у возилима) до индуструје (индукциона грејања, беспрекидна
напајања, пуњење батерија, заваривање, за покретање асинхроних машина итд) [1].
2.1 Историјски развој
Први светски фреквентни претварач намењен електромоторним погонима, легендарни
VLT5 (eng. VeLoTrol – скраћено од
Velocity Control
), развила је данска компанија Danfoss
1868. године [2].
Настанак VLT претварача везује се за два Danfoss инжењера,
Arne Riisager и Arne
Jensen. Они су присуствовали једној значајној конференцији у Лондону када су слушали
говор једног предавача који је тврдио да је једини могући начин регулисања брзине АC
мотора механички. Они се нису сложили са његовом тврдњом и желели су да докажу да
постоји и други начин за регулацију брзине AC мотора, осим механичког. Успели су у томе и
постигли глобални успех јер је њихова компанија била прва на тржишту која је у процес
увела производњу фреквентног претварача VLT5 1968 године, Слика 1.
Слика 1. Фреквентни претварач VLT 5 из 1968.године.
Током шездесетих година долази до повећања потражње за фреквентним претварачима.
Они су масовно почели да се користе у индустрији, као и у индустријским локомотивама, за
Конфигурације енергетских претварача у електромоторним погонима
4
потребе виљушкара, и уједно за регулацију система за слетање авиона на аеродромима. На
тај начин се и повећала сложеност тих претварача [2].
Наредни корак Danfoss-ових инжењера био је тај да су осмислили методу стварања
реалног магнетног поља ротације у мотору, а затим га регулисали при свим брзинама испод
номиналне брзине мотора, и дошли до решења како да користе топлоту коју генерише уређај.
Danfoss-ови инжењери су развили напредни алгоритам за контролу заснован на
такозваном принципу модулације амплитуде импулса (eng.
Pulse Amplitude Modulation
(PАМ)
). Алгоритам је омогућио да се једносмерна струја претвори у наизменичну струју у
претварачу. PАМ-ом је омогућено смањење струје мотора како би се обезбедио рад при
мањим брзинама. Сам хардвер је био подељен у две коморе, где је доњи део потопљен у уље
како би се топлота распршила на површину ормана.
Убрзо је начин управљања над робусним моторима променом фреквенције преузела и
индустрија хране и пића.
Током 1970-их година Danfoss је наставио да усавршава нову технологију која је за
циљ имала да повећа флексибилност и ефикасност. Уведени су нови пројекти који су
омогућили прилагођавање брзине појединачних апликација и синхронизацију са другим
производним процесима.
У свету електронике, данашња опрема има мало заједничког са оригиналним VLT5
погоном из 1968. године. Са великим напредовањем у технологији транзистора, као
прекидача снаге, и дигиталном контролом у протеклих 20 година, ова врста погона постала је
једна од најнапреднијих Danfoss-ових технологија [2].
Оригинални VLT5 је тежак 54 kg. Данашњи еквивалент исте снаге, приказан на Слици
2, тежи око 5 kg.
Слика 2. Фреквентни претварач нове генерације VLT.
Контролом брзине обртања мотора драматично се могу смањити трошкови рада
вентилатора, пумпи и још много тога, што би за покретање ових уређаја изискивало велику
потрошњу електричне енергије и емисије CO
2
.
Захваљујући коришћењу Danfoss-ових погона у апликацијама емисија CO
2
се може
смањити за 37 милиона тона годишње што је једнако емисији CO
2
од 12 милиона
аутомобила у Европи. На глобалном нивоу, потенцијал за уштеду енергије је невероватан [2].

Конфигурације енергетских претварача у електромоторним погонима
6
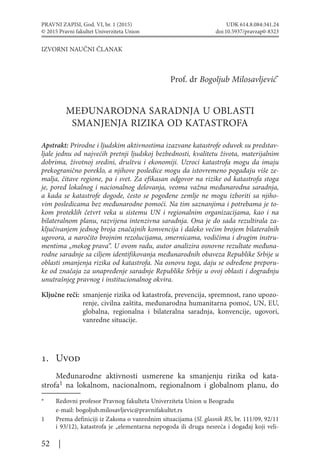
Као што се види са Слике 3, снага претварача која се може постићи са ИГБТ
транзисторима нешто је мања од снаге са ГТО (eng.
GTO-Gate Turned-off Thyristor
) новим
транзисторским прекидачима, али ИГБТ транзистори имају знатно већу прекидачку
фреквенцију [1].
10
2
10
3
10
4
10
5
10
6
10
2
10
3
10
4
10
5
10
6
10
1
10
1
10
2
10
3
10
4
10
2
10
3
4500
7500
6500
U
P
f
I
DIODA
GTO
IGBT
MOSFET
BT
GTO
IGBT
BT
MOSFET
Слика 3.
Карактеристика граничне напонско-струјне могућности појединих
прекидачких елемената у поређењу са граничним могућностима диоде и у погледу
фреквенције и снаге [1].
3.1.1 Биполарни транзистор
Биполарни транзистори (БТ) настају допирањем чистог полупроводника, најчешће
силицијума или германијума, где настаје структура у којој се између два подручја истог типа
проводљивости (P или N) налази подручје супротног типа проводљивости (N или P). Ово нам
даје могућност да имамо два типа биполарних транзистора који се означавају као: PNP
(позитивно-негативно-позитивно), NPN (негативно-позитивно-негативно). На Слици 4 је
приказан симбол биполарног транзистора са својим излазима [3].
Слика 4. Биполарни транзистор.
База (B) и емитер (E) чине пропустно поларизован PN спој (код NPN транзистора), за
разлику од колектора (C) и базе који чине непропустно поларизован PN спој.
Принцип рада транзистора се заснива на побуди мањинских носиоца наелектрисања из
емитера у базу и њиховом преносу до колектора. Напон на споју база-емитер мањи од напона
Конфигурације енергетских претварача у електромоторним погонима
7
на споју колектор-база, а такође је и струја која тече у базу мања од струја емитера и
колектора [3].
Када имамо спој са заједничком базом остварује се само појачање напона, у споју са
заједничким колектором само појачање струје, а у споју са заједничким емитером појачава се
и напон и струја, па је појачање снаге највеће.
Било да се ради о PNP или NPN типу транзистора оба обављају исту функцију. Разлика
је у поларитетима спољних напона и струја, те у врсти носилаца електричне струје. У PNP
типу транзистора главни носиоци струје су шупљине, а у NPN типу транзистора су то
електрони [3].
Развојем биполарног транзистора, постигнути су напони преко 1 kV и струје од више
стотина ампера. Брзина укључења и искључења је на нивоу неколико микросекунди, што је
нешто испод жељених вредности. Највећи проблем је међутим то што је за његово
управљање потребна велика снага. Велика базна струја, и потреба да се она одржава на тој
вредности за све време док је транзистор укључен, представља велики недостатак
биполарног транзистора. Код ових транзистора за велике струје, базна струја достиже
вредности и неколико ампера, што захтева веома јака додатна напајања и веома снажна
погонска кола [1].
Следећи недостатак је и негативан температурни коефицијент напона U
CE
. Смањење
овог напона са повишењем температуре је добро јер смањује статичке губитке, али
представља проблем при паралелном везивању транзистора због појаве температурне
нестабилности. Галванска одвојеност, до данас није решена на задовољавајући начин, ни код
једне полупроводничке компоненте.
Ови и други проблеми и захтеви, разлог су перманентног рада на развоју нових типова
транзистора, посебно оних за примене у енергетској електроници. Као резултат тих напора
настало је више нових компонената (ФЕТ, МОСФЕТ, ИГБТ, ГТО) [1].
У овом раду ће бити разматрани само МОСФЕТ, ИГБТ и ГТО пошто су највише
заступљени у електромоторним погонима.
3.1.2 МОСФЕТ
Код МОСФЕТ-а је метални слој улаза (
gate
), оксидом (CiO
2
) потпуно изолован од
извора (
source
). Ради се о веома танком слоју оксида (дебљине око 0,1μм) који може да
поднесе напон од неколико десетина волти. Мали електрични капацитет и низак пробојни
напон чине МОСФЕТ веома осетљивим на статички електрицитет [1].
За разлику од ФЕТ-а који има највећу проводност при нултом управљачком напону,
направљени су и МОСФЕТ-ови који долазе у стање провођења тек када им се доведе напон
на
gate
. Прва врста МОСФЕТ-ова названа је транзисторима са формираним каналом.
Транзистори се блокирају нултим напоном, а доводе у проводно стање одговарајућим
управљачким напоном на
gate
-у [1].
Такође треба истаћи и то да структурa МОСФЕТ-а омогућава знатно мање димензије
од биполарног транзистора због чега су они веома погодни за примену у интегрисаним
колима.
Први МОСФЕТ-ови су били транзистори са планарном (површинском) структуром код
кога су сви изводи са исте стране. Слика 5 приказује два често коришћена симбола
МОСФЕТ-а[1].

Конфигурације енергетских претварача у електромоторним погонима
9
користити за велике снаге услед тиристорског ефекта и веће отпорности
R
DC
него код
биполарних транзистора што изазива пад напона у укљученом стању од
U
f
= 1,7-3V у
зависности од снаге ИГБТ компоненте. Новије ИГБТ компоненте имају максималну
фреквенцију рада до 50 KHz. Ако се ради о снажнијим ИГБТ-овима њихова фреквенција
рада се смањује. Производе се у опсегу за напоне од 300-1800V и струје од 10-1000А [4]. У
овом раду бавићемо се овим прекидачким елементима.
3.1.4 ГТО
Развојем технологије израде тиристора дошло је до значајних побољшања
тиристорских карактеристика. Као резултат напретка у изради, дошло је до стварања
тиристора којим се може на известан начин управљати преко улаза.
Структура ГТО тиристора је иста као и код стандардног тиристора и представља
четворослојну структуру. Има релативно мали пад напона у укљученом стању који износи
око 3V. На Слици 7 приказана симбол ГТО-а [5].
Слика 7. Симбол ГТО тиристор.
Битно је знати да је
n
-област јако допирана из разлога да струјно поjачање не буде
превелико како би се ГТО могао лакше искључити [5].
Укључивање ГТО компоненте врши се малим позитивним струјним импулсом а
искључује великим негативним струјним импулсом на улазу. Интензитет негативног
импулса треба да достиже између 25-30% номиналне струје. Сваки ГТО треба да има
напонски снабер јер постоји велика могућност од напонског удара јер је пораст напона веома
велик du/dt (енг.
Slew Rate
). Уколико имамо ГТО са симетричном карактеристиком тада су
му комутационе особине слабије.
Новије ГТО компоненте могу да блокирају веома висок напон, између 4 kV и 6 kV.
Подносе и струје од преко 2000 А. Врло брзо се усавршавају тако да су данас доступне и
компоненте као ЕТО (eng.
Emiter Turn-Off
) тиристор који је много бржи од старијих ГТО
компоненти и издржава снаге на својим крајевима од неколико МW [5].
3.2 Типови енергетских претварача
Даљи развој енергетске електронике ишао је у смеру решавања проблема регулације
брзине асинхроног мотора. Прва решења су се заснивала на каскади и регулацији брзине
клизноколутног мотора. Овде се енергија из роторског кола, уместо да се троши на
отпорнику, враћа у наизменичну напојну мрежу.
После тога развијају се технике инвертора и циклоконвертора, којима се решава
питање фреквентне регулације брзине кавезних асинхроних и синхроних мотора.
Конфигурације енергетских претварача у електромоторним погонима
10
Једна од метода управљања асинхроним мотором је фреквентно управљање, односно,
управљање променом напона и учестаности. Уређаји који омогућавају да се мењају фиксни
параметри напојне мреже (напон и учестаност), називају се фреквентни претварачи. Све док
се нису појавили ови уређаји није било могуће квалитететно и ефикасно управљати брзином
асинхроног мотора. Много тога се променило од појаве првог фреквентног регулатора крајем
60-их година, али су принципи рада остали исти све до данас [1].
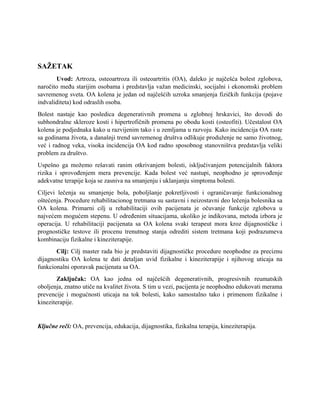
Када се говори о претварачима AC/AC система подела AC/AC претварача је дата на
Слици 8:
AC/AC Претварачи
Индиректни AC/AC
Претварачи
Директни AC/AC
Претварачи
Софт Старт
Матрични конвертори
Цикликонвертори
Класични матрични
конвертори
Индиректо
модулисани матрични
конвертори
Индиректни
матрични конвертори
“Sparse” матрични
конвертори
“Very Sparse”
матрични конвертори
“Ultra Sparse”
матрични конвертори
“Four lag” матрични
конвертори
Струјно-регулисан
инвертор
Напонско-регулисан
инвертор
Инвертор са два нивоа
Инвертор са више
нивоа
Диодни мост на
напонски регулисаним
инвертором
Са клампованим
диодама
“Flying capacitors”
Инвертор са више
нивоа у Н-мосту
Слика 8. Подела AC/AC претварача [6].
Постоје директни и индиректни претварачи. У директне претвараче спадају
циклоконвертори и матрични конвертори, а у индиректне претвараче спадају фреквентни
претварачи са напонским или струјним међуколом. У наставку рада ће бити објашњени
претварачи који се најћешће сусрећу у електромоторним погонима.

Конфигурације енергетских претварача у електромоторним погонима
12
На Слици 9 приказани су таласни облици излазног напона и добијени сигнали при
позитивној и негативној конверзији. Позитиван напон добија се у времену
0
0
2
T
−
, а
негативна у времену
0
0
2
T
Т
−
. Фреквенција излазног напона је
n
пута нижа од основне
фреквенције и може се наћи на основу једначине :
0
0
1
f
T
=
(1)
Средња вредност напона позитивне групе тиристора једнака је са средњом вредношћу
напона негативне групе тиристора и у директној је опозицији са њом [7].
2
1
d
d
U
U
= −
(2)
Међутим, иако је сума средњих вредности напона
2
1
0
d
d
U
U
+
=
нису и збирови
тренутних вредности напона
u
d1
+
u
d2
једнаки нули. Услед те разлике у тренутним
вредностима појављују се струје циркулације које круже између две исправљачке групе. Та
струја се мора ограничити додавањем одговарајућих индуктивности приказаних на Слици 9.
Слика 10. Таласни облици струје и напона за угао паљења тиристора α=0 [7].
Код циклоконвертора тиристорског типа фреквенција је ограничена на око
2
3
од
улазне фреквенције. Разлог за ово је што је тиристор само делимично управљив прекидачки
елемент. Он се може укључити у жељеном тренутку, али се за искључење мора чекати да
струја падне на нулу. Излазни напон из ових циклоконвертора, састављен је од сегмената
улазних напона.
Развојем прекидачких транзистора великих снага омогућено је добијање излазних
напона на новим принципима јер се сада ради о потпуно управљивом прекидачком елементу.
Смањење фреквенције се може вршити само у целобројним умношцима.
Конфигурације енергетских претварача у електромоторним погонима
13
Они раде на принципу да негативну полупериоду исправе у позитиван део (на горе) а
да позитиван део полупериоде спусте у негативан део (на доле) и на тај начин имамо две
позитивне и две негативне полупериоде и тако се смањује фреквенција за 25% као што је
приказано на слици 10.
Циклоконвертори се могу контролисати и уз помоћ угла вођења тиристора што се може
видети на Слици 11. На овој слици је приказан један напонски талас (слика 11а) , на слици
под (б) је приказан тај исти напон који је прошао кроз циклоконвертор али сада је
фревенција смањена за 25% , на истој слици али под (в) је приказан напонски талас који је
прошао кроз циклоконвертор али је угао паљења тиристора 60º, док је угао паљења
променљив добија се изглед криве под (г).
Слика 11. Таласни облици напона за угао паљења тиристора α=0, α=60,
α – променљиво [8].
3.2.2 Матрични конвертори
Матрични конвертори спадају у групу директних претварача што значи да се напајају
директно из мреже без присуства елемената за складиштење енергије (кондензатора велике
капацитивности). Ова чињеница представља предност матричних конвертора у погледу цене
на тржишту и дужине животног века конвертора. Овај тип конвертора омогућава двосмерни
ток енергије и погодан је за регулацију електромоторних погона. Њиме се може управљати
методом просторног вектора о којој ће бити речи нешто касније у раду. Овом методом
могуће је добити простопериодичан таласни облик улазне струје и излазног напона [9].
Конфигурација матричних конвертора изведена је коришћењем девет бидиректних
прекидача сложених у матрицу (Слика 12) по чему су и добили име. Матрица је димензије
3х3. Ови прекидачи имају могућност да проводе струју у оба смера и да блокирају напон оба
поларитета [9].

Конфигурације енергетских претварача у електромоторним погонима
15
i
s
(0)
(2)
(1)
(3)
Слика 14. Бидиректни прекидачи [11].
Комбинацијом стања прекидача никад се не смеју кратко спојити две улазне фазе, нити
се сме нека од излазних фаза оставити отвореном. Овај захтев условљава да у свакој колони
прекидачке матрице у сваком тренутку времена буде укључен тачно један прекидач. Ови
захтеви су изузетно строги и морају се испоштовати. За избегавање преклапања времена
укључивања две фазе постоји неколико начина. Један од њих је уважавање мртвог времена о
чему ће бити речи нешто касније у раду.
Под наведеним ограничењима, матрични конвертор има 3
3
=27 стања које треба
разматрати. Стање прекидача је описано матрицом S која је за прекидачку комбинацију са
Слике 12 [11].
0 0 0
0 1 1
1 0 0
S
=
.
(3)
У матрици стања се увек налази шест нула и три јединице, при чему свака колона
садржи тачно једну јединицу. Излазни напони конвертора су дати матрицом:
1
1
2
2
3
3
out
in
T
out
in
out
in
v
v
v
S
v
v
v
=
,
(4)
1
1
2
2
3
3
0 0 1
0 1 0
0 1 0
out
in
out
in
out
in
v
v
v
v
v
v
=
,
(5)
док су улазне струје дате са :
1
1
2
2
3
3
in
out
in
out
in
out
i
i
i
S i
i
i
=
.
(6)
Конфигурације енергетских претварача у електромоторним погонима
16
При коришћењу матричног конвертора у систему мора се додати и улазни филтар
(Слика 15) који се поставља између извора наизменичног напајања и улаза матричног
конвертора. Његова улога је да спречи појаву виших хармоника струје и смањење осцилација
излазног напона током управљачког циклуса, пригушење шума изазваног радом
бидиректних прекидача, и да осигура стабилност целог система... [9].
L
F
L
F
L
F
C
F
C
F
C
F
C
F
C
F
C
F
Слика 15. Топологија улазних филтра [9].
Када је реч о излазном напону матричног конвертора напон је ограничен на 86% од
улазног напона и то се матричном конвертору приписује као мана и представља велико
ограничење без озира који се начин управљања користи. На улаз матричног конвертора је
доведен трофазни напон ефективне вредности 380V. Код конвертора овог типа може се
видети типичне карактеристике директних претварача. Излазни напон сваке фазе може
имати вредност једног од улажних напона
v
IN1
,
v
IN2
или
v
IN3
и у зависности од тога који је
прекички елемент укњучен један од линијских напона се прослеђује на излаз а његове
вредности су временки померене, као резултат добија се мања хармонијска диспозиција
излазног напона [10].
На Слици 16 је представљен таласни облик излазног напона матричног конвертора [10].
Слика 16. Таласни облик излазног напона матричног конвертора [9].
3.2.3 Инвертори (DC/AC претварачи)
Инвертор је последњи елемент фреквентног претварача који се налази испред мотора
(Слика 17).
Инвертори су системи енергетске електронике који једносмерни напон или струју
претварају у наизменични напон или струју. Они спадају у индиректну групу фреквентних
претварача код кoјих се напон прво исправи у једносмерни а потом инвертором се добије

Конфигурације енергетских претварача у електромоторним погонима
18
Управљиви исправљач се састоји од тиристора у мостном споју који претвара напон
мреже у једносмерни напон. За разлику од диодних исправљача код тиристоских исправљача
амплитуда излазног напона не зависи од амплитуде мрежног напона већ од угла паљења
тиристора. Угао паљења тиристора је тренутак у коме ће тиристор провести али у стању
вођења ће остати све док не дође у засићење. На Слици 19 је приказан трофазни тиристорски
исправљач.
a
b
c
Т1
Т2
Т3
Т4
Т5
Т6
М
Е
Ђ
У
К
О
Л
О
Слика 19. Тиристорски исправљач
Посматрајући ток енергије следећи елемент фреквентног претварача је међуколо које је
и најједноставнији део претварача али има битну улогу за даљу конструкцију претварача.
Међуколо може бити струјно или напонско и састоји се само од једног елемента пригушнице
или кондезатора. Улога ових елемената ће бити наконадно објашњена. У зависности да ли је
међуколо напонско или струјно, на инвертор се доводе или струја или напон па су они
напонски или струјни инвертори [8].
Ако у међуколу у паралели постоји кондезатор великог капацитета ради се о напонском
инвертору (Слика 20).
u
d
3f
AM
s
c
b
a
ИСПРАВЉАЧ
МЕЂУКОЛО
ИНВЕРТОР
Слика 20. Напонски инвертор [8]
.
Основни задатак овог кондензатора је да одржава константан напон којим ће бити
напајан инвертор тј. да обезбеди филтриран и стабилан напон [1].
Напонско међуколо, а самим тим и напонски инвертор се доста примењује у великом
броју у управљачким методама.
Код међукола које има на ред пригушницу велике индуктивности која не дозвољава
нагле промене струје ради се о струјном инвертору (Слика 21).
Конфигурације енергетских претварача у електромоторним погонима
19
3f
AM
s
c
b
a
ИСПРАВЉАЧ
МЕЂУКОЛО
ИНВЕРТОР
i
Слика 21. Струјни инвертор [8].
На слици 17 се издваја још један део, склоп за кочење, који се састоји од још једног
прекидачког елемента и са њим на ред је постављен отпорник
R
k
у једносмерном међуколу
који се укључује када мотор преко инвертора враћа енергију у коло. Преко отпорника се
врши дисипација енергије тј. енергија се на том отпорнику ослобађа у виду топлоте. Овај део
кола је неопходан у случају када се једносмерне међуколо напаја преко исправљача који
омогућава проток енергије само у једном смеру. Познате су и конфигурацје дуплих
неуправљивих или управљивих исправљача који омогућавају враћање енергије у мрежу. У
том случају постојање кола за кочење није неопходно.
У овом раду биће детаљније описан инвертор као део фреквентног претварача пошто се
преко њега врши и управљање мотором о чему ће бити касније речи.
Посматрајући слику 17 конфигурација инвертора која је коришћена је са 6 прекидачких
елемената распоређених у три гране. Диоде које су паралелно везане са прекидачким
елементима служе да би се после искључења неког прекидачког елемента омогућило
затварање тока струје. Улога инвертора је да претвори константан једносмеран напон
добијен из једносмерног међукола у наизменичан напон погодан за рад мотора. Од раније је
познато да су основни делови инвертора полупроводнички прекидачи који могу
контролисати и фреквенцију и напон. Као полупроводнички прекидачи раније су се
користили тиристори а данас се користе транзистори јер они могу бити проводни и
непроводни у било ком тренутку док тиристор не може да промени своје стање све док
струја која протиче кроз њега не спадне на нулу, а и имају малу прекидачку фреквенцију.
Прекидачка фреквенција транзистора је у опсегу од 300 Hz до 15kHz [11] док је у
комерцијалним фреквентним претврачима обично могуће подесити прекидачку фреквенцију
у опсегу од 2kHz до 20kHz (или 4kHz до 16kHz).
3.2.4 Инвертор са два нивоa
Да би се лакше разумео принцип рада инвертора кренуће се од напонског инвертора са
два нивоа. За реализацију трофазног напонског инвертора са два нивоа користе се
полупроводнички прекидачки елементи, најчешће IGBT транзистори који су распоређени у
три гране као на Слици 22. Управљање овим прекидачима врши се довођењем управљачких
сигнала на њихове улазе (gate-ове) [12].

Конфигурације енергетских претварача у електромоторним погонима
21
3.2.5 Инвертор са више нивоa (
Multilevel
инвертор)
Због ограничења просторне резолуције напонских вектора код инвертора са два нивоа
долази до развоја инвертора са више нивоа, који омогућавају већу просторну резолуцију
напона у αβ равни. Без обзира на топологију принципијелна шема једне фазе мултилевел
инвертора може се приказати као на Слици 24 , где је са
N
означен број напонских нивоа, а са
V
a
напон фазе а [13].
Vd/(N-1)
Vd/(N-1)
Vd/(N-1)
Vd/(N-1)
0
1
2
N
Va
Слика 24. Принципијелна шема једне фазе инвертора са више нивоа [13].
Тренутна вредност напона
V
a
дата је једначином:
,
0,1, 2,.., N 1
1
d
a
V
V
k
k
N
=
=
−
−
,
(10)
где је са
k
означен положај прекидача [13].
Свака фаза може попримити било коју вредност напона за
k
од 0 до N-1. На основу
тога може се израчунати да ће за инвертор са N нивоа постојати 3N(N-1)+1 различитих
вектора напона. Неки вектори напона се могу добити са више различитих комбинација
прекидача. За инвертор са 3 нивоа, број различитих вектора напона је 3·3(3-1)+1=19 (Слика
25 и Слика 26.).
C1
C2
U
DC
a
b
c
P1
P2
P3
P4
3f
AM
s
c
b
a
Слика 25. Инвертор са 3 нивоа.
Конфигурације енергетских претварача у електромоторним погонима
22
Напонски вектори инвертора са три нивоа формирају два концентрична хексагона са
центром у координатном почетку. Уопштено, број ових хексагона једнак је N-1, где је N број
нивоа инвертора. Код инвертора са 5 нивоа образују се 5-1=4 концентрична хексагона, а код
инвертора са 9 напонских нивоа образује се 8 концентричних хексагона који се формирају на
раније описан начин.
На Слици 26 приказани су хексагони које формирају вектори напона у равни за
инвертор са три нивоа.
000
111
222
100
211
200
110
221
210
220
120
020
010
121
021
022
011
122
012
002
102
202
001
112
101
212
201
Слика 26. Вектори напона за инвертор са три нивоа и одговарајућа прекидачка стања.
Врхови напонских вектора на Слици 26 налазе се у теменима хексагона и дата је
комбинација прекидача који доводе до формирања одговарајућег вектора. Може се уочити да
се око сваког врха вектора који леже на мањем хексагону може формирати по један потпуни
елементарни хексагон. Такође прелаз са било ког вектора на неки суседни може се извршити
променом само једног прекидача за један ниво [9].
Тако на пример ако се узме инвертор са 5 нивоа (Слика 27) јасно се може закључити
да је број напонских вектора 61, а код инвертора са 9 нивоа
3 9 (9 1) 1
261
− + =
напонски
вектор.
Постоје три типа инвертора са више нивоа:
•
Multilevel
инвертори са клампованим диодама,
•
„
Flying capacitors“ multilevel
инвертор
•
Multilevel
инвертор у H-мосту [10].

Конфигурације енергетских претварача у електромоторним погонима
24
4. МЕТОДЕ УПРАВЉАЊА ЕНЕРГЕТСКИМ ПРЕТВАРАЧИМА
4.1 Шестопулсни рад инвертора (Six-step operation)
Као што му само име каже шестопулсни рад инвертора представља само један од
начина управљања трофазним инвертором [11]. Six-step режим је добио име по томе што
прекидачки елементи мењају стање на једној шестини периоде, односно да би се направио
пун обрт напонског вектора потребно је да се измени свих 6 основних напонских вектора
који формирају хексагон са Слике 29.
Карактеристика шестопулсног режима рада инвертора је да се синусоидни облик
излазног напона добија правилним распоредом укључења и искључења прекидачких
елемената.
Ради лакшег разумевања принципа рада користићемо Слику 17 на којој је приказан
инвертор са два нивоа са својим прекидачким елементима
P
1 до
P
6.
Прекидачки елементи једне гране инвертора раде у инверзном режиму што значи да
када горњи прекидач води, доњи прекидач је искључен и обрнуто :
1
2
P
P
=
,
3
4
P
P
=
,
5
6
P
P
=
.
На Слици 29 је приказан хексагон који показује векторе које образује шестопулсни инвертор.
U
1
(100)
U
2
(110)
U
3
(010)
U
4
(011)
U
5
(001)
U
6
(101)
Слика 29. Хексагон који образује шест напонских вектора [12].
Дијаграми стања прекидача су одређени тако да обезбеде прелазак на суседни вектор на
на хексагону са Слике 29 након
1
6
периоде чиме се степенастом апроксимацијом
апроксимирају синусоидни излазни напони.
Фазни напони се добијају тако што се претпоставља да је збир тренутних вредности
фазних напона једнак нули што се постиже избором одговарајућег референтног потенцијала
тј. напона једносмерног међукола
U
DC
.
Конфигурације енергетских претварача у електромоторним погонима
25
Ефективна вредност овако добијеног линијског напона износи:
6
2
3
STEP
Leff
DC
U
U
−
=
.
(11)
Амплитуда основног хармоника износи:
6
1.
2 3
STEP
L h
DC
U
U
−
=
,
(12)
а ефективна вредност основног хармоника се рачуна као:
6
1.
2 3
6
2
STEP
L
h eff
DC
DC
U
U
U
−
=
=
.
(13)
Максимална вредност фазног напона на изласку из инвертора при оваком шестпулсном
раду износи:
6
max
2
0, 666
3
STEP
F
DC
DC
U
U
U
−
=
=
,
(14)
6
max
3
2
STEP
DC
F
U
U
−
=
(15)
Ефективна вредност фазног напона:
6
2
3
STEP
F eff
DC
U
U
−
=
.
(16)
Амплитуду основног хармоника за фазни напон гласи:
6
1.
2
STEP
F
h
DC
U
U
−
=
,
(17)
што одговара ефективној вредности:
6
1.
2
STEP
F h eff
DC
U
U
−
=
.
(18)
У табели 1 дати су фазни и линијски напони са одговарајућим стањима прекидача са
слике 13 добијени на основу једначина (7)-(9).

Конфигурације енергетских претварача у електромоторним погонима
27
a
b
c
U
DC
P1
P2
P3
P4
P5
P6
3f
AM
c
b
a
U
F
U
L
Слика 31. Инвертор са два нивоа (за графичко добијање линијских и фазних напона).
Пратећи Табелу 1 прекидачки елементи се постављају у одговарајуће стање (ON-1,
OFF-0) на тај начин се доводи + крај на одговарајући крај на мотору (a, b, c), овај принцип
исто важи и за – крајеве који се доводе на одговарајуће крајеве мотора и лако се могу
очитати вредности линијских и фазних напона са слике. Тако, на пример узмимо случај
следећи конфигурацију прекидача P1=1, P3=0, P5=0: + крај се доводи на тачку a ,– крај на
тачке b и c. Линијски напони
U
ab
=
U
DC
,
U
bc
=0,
U
ca
=0, фазни напони
U
a
=2/3
U
DC
,
U
b
=-1/3
U
DC
,
U
c
=-1/3
U
DC
.
Као што је већ раније речено за решавања проблема регулације брзине
електромоторних погона са машинама наизменичне струје развиле су се технике управљања
инверторима. Метода које се најчешће користи за управљање асинхроним мотором је метода
промене напона и учестаности познатија као U/f контрола.
Пошто шестопулсни режим рада даје само шест вектора напона и два нулта ако желимо
у сваком тренутку мењати фреквенцију ротације или смер морамо користити технике
модулацијије напона који обезбеђују „континуалну“ промену напонског вектора између
наведених шест основних. Циљ развоја различитих техника управљања инвертором је
смањење прекидачких губитака, побољшање фактора искоришћења и добијање таквог
алгоритма који се може инплементирати у другим системима.
4.2 Амплитудно ширинска модулација
Код амплитудске ширинске модулације ((PAM) eng. -
Pulse Amplitude Modulation
)
инвертор се напаја променљивим напоном једносмерног међукола. Овај напон који долази на
инвертор се претвара у наизменични правоуглог облика и жељене амплитуде и фреквенције.
Променљиви једносмерни напон који се доводи на инвертор добија се помоћу регулисаног
тиристорског исправљача или чопера. Управљачка електроника код PAM-а истовремено
подешава напон исправљача и фреквенцу инвертора, најчешће одржавајући њихов
међусобни однос.
На Слици 32 је приказана конфигурацја једног фреквентног претварача са PAM-ом.
Регулација напона је изведана улазним чопером Т7, а транзистор Т8 представља чопер за
динамичко кочење, при чему се развијена енергија троши на отпорнику R1 [1].
Конфигурације енергетских претварача у електромоторним погонима
28
АМПЛИТУДНА
МОДУЛАЦИЈА
P2
a
b
c
3f
AM
s
c
b
a
a
b
c
ДРАЈВЕРИ
U
I
УПРАВЉАЊЕ
КОЛО ЗА
КОЧЕЊЕ
ИНВЕРТОР
P1
P3
P4
P5
P6
R1
T8
T7
D7
R
Слика 32. Фреквентни претварач са PAM-ом [1].
Добре стране PAM-a су: једноставнија контролна логика и мањи прекидачки губици.
Лоше стране PAM-а су: код тиристорских претварача се јавља проблем са комутацијом
при нижим напонима једносмерног међукола, мањи опсег регулације јер се при ниским
фреквенцијама јавља јак утицај хармоника.
4.3 Импулсно ширинска модулација
Импулсно ширинска модулација ((PWM) eng. –
Pulse Width Modulation
) (развијена
шездесетих година прошлог века) је техника која се дефинише тако што се ширина импулса
импулсног сигнала, који се добија на излазу претварача, контролише помоћу неког другог
улазног сигнала. Сигнал на излазу претварача је поворка импулса чија се ефективна вредност
мења помоћу ширине импулса. Из овога се може закључити да се на излазу добија поворка
сигнала при чему је ефективна вредност овог сигнала једнака ефективној вредности жељеног
синусног сигнала.
Синусна импулсно ширинска модулација је техника која се навише користи. У овој
техници време вођења прекидачких елемената у инвертору одређено је поређењем два
сигнала:
1) референтни (синусни) сигнал који је потребно добити на излазу претварача,
2) носећи (тестерасти) сигнал чија је фреквенција много већа од фреквенције
референтног (синусног) сигнала [12].
Однос амплитуде референтног сигнала и амплитуде носећег сигнала назива се индекс
амплитудске модулације и обележава са
m
:
ref
noseće
u
m
u
=
.
(19)
Амплитуда носећег сигнала треба да буде већа или једнака од амплитуде референтног
сигнала. Када се ради о трофазним системима потребна су 3 референтна сигнала и то за
сваку фазу посебнo. Референтни сигнали заједно са носећим као и добијени PWM напони
приказни су на Слици 33. Ако индекс модулације заузима вредност између 1 и 0 онда се има
линеарна зона модулације о чему ће бити речи нешто касније.

Конфигурације енергетских претварача у електромоторним погонима
30
t
t
PWM
T
s
2T
s
3T
s
4T
s
t
P1
t
P1
t
P1
t
P1
t
t
T
s
2T
s
3T
s
4T
s
u
noseće
t
P1
t
P1
t
P1
t
P1
период
бројача
вредност за
поређење
u
noseće
период
бројача
вредност за
поређење
PWM
Слика 34. PWM у зависности од носећег сигнала [12].
Код тестерастог носећег сигнала време укључења прекидачког елемента је увек
одређено почетком односно крајем прекидачког циклуса док искључење зависи од трајања
импулса односно од вредности референтног сигнала.
Код троугаоног носиоца, оба два времена тј. време укључења и време искључења
прекидачких елемената су покретна и симетрична у односу на средину прекидачког циклуса
Т
s
. Због овога се PWM са тестерастим носећим сигналом назива асиметрични PWM а са
троугаоним носећим сигналом симетрични PWM [12].
Максимална вредност напона на изласку из инвертора при шестопулсном раду релација
(14) износи:
6
6
max
max
2
3
3
2
STEP
STEP
F
DC
DC
F
U
U
U
U
−
−
=
=
.
(20)
Када је индекс модулације (19)
m
=1 кажемо да су амплитуде референтног и носећег
сигнала једнаке и у том случају максимални фазни напон који се може остварити PWM
техником је :
max
1
2
PWM
F
DC
U
U
=
.
(21)
Максимална вредност фазног напона се добија из израза:
6
6
max
max
max
1
1 3
0, 75
2
2 2
PWM
STEP
STEP
F
DC
F
F
U
U
U
U
−
−
=
=
=
.
(22)
Ефективна вредност линијског напона дата је изразом:
6
max
max
3
2
0,918
0,918
0, 611
3
2
PWM
PWM
STEP
L eff
F
F
DC
DC
U
U
U
U
U
−
=
=
=
=
.
(23)
Из израза (22) се види да при PWM модулацији амплитуда фазног излазног напона
износи 75% од вредности напона
који се има при шестопулсном раду инвертора, односно
50% од напона једносмерног међукола
U
DC
.
Основни задатак који се поставља пред различите технике модулације је што веће
искоришћење напона једносмерног међукола.
Конфигурације енергетских претварача у електромоторним погонима
31
4.4 Импулсно ширинска модулација просторног вектора
Да би се добила што већа искоришћеност напона једносмерног међукола дошло је до
потребе за унапређивањем импулсно ширинске модулације где је као резултат развијена
једна од најзаступљенијих техника модулације а то је импулсно ширинска модулација
просторног вектора ((SVPWM) eng-
Space Vector Pulse Width Modulation
). Ова метода даје и
до 86% искоришћења напона једносмерног међукола и заснива се на представи напона
инветора преко просторног вектора.
Ако посматрамо Слику 19 и ако посматрамо инвертор и прекидачке елементе у њему
вектор линијског напона се може израчунати на следећи начин што је и проказано у Табели
1:
1
1
0
0
1
1
1
0
1
ab
bc
DC
ca
U
a
U
U
b
U
c
−
=
−
−
,
(24)
где су a, b, c стања прекидачких елемената (ON/OFF). Када су укључени горњи
прекидачки елементи тада су a, b, c једнаки 1 а доњи прекидачи су једнаки 0.
Фазни напони се могу израчунати помоћу вектора:
2
1
1
1
1
2
1
3
1
1
2
a
b
DC
c
U
a
U
U
b
U
c
−
−
=
−
−
−
−
.
(25)
Овако записане вредности за фазне и линијске напоне нису ништа друго до другачије
представе фазних и линијских напона које су већ уписане у Табели 1.
Основни принцип ове методе је да се синусни напон третира као вектор константне
амплитуде који се ротира константном фреквенцијом.
Референтни напон
U
r
се апроксимира комбинацијом осам вектора
0
7
U
U
−
. При томе се
врши трансформација вектора трофазног напона у стационарни
αβ
кординатни систем.
Напони
U
α
,
U
β
и
U
r
као и угао α могу се представити на следећи начин:
2
1
1
3
3
3
ab
bc
ca
U
U
U
U
=
−
−
,
(26)
1
1
3
3
bc
ca
U
U
U
= −
+
,
(27)
2
2
r
U
U
U
=
+
,
(28)
1
0
tan
2
s
U
t
f t
U
−
=
=
=
,
(29)

Конфигурације енергетских претварача у електромоторним погонима
33
1 6,
0
60
o
n сектор
i
=
−
.
Сваки прекидачки елемент има дефинисано своје време вођења у зависности од тога у
ком се сектору налази референтни вектор напона [14], [15], [16]. На Слици 36 је дат приказ
времена вођења прекидачких елемената трофазног напонског инвертора у свих 6 сектора.
.
T
0
/2
T
1
T
2
T
0
/2
T
s
P
1
U
0
U
2
U
7
U
1
Горњи
прекидачи
Доњи
прекидачи
T
s
U
7
U
2
U
1
U
0
T
0
/2
T
1
T
2
T
0
/2
СЕКТОР 1
P
3
P
5
P
2
P
4
P
6
T
0
/2
T
1
T
2
T
0
/2
T
s
U
0
U
2
U
7
U
3
Горњи
прекидачи
Доњи
прекидачи
T
s
U
7
U
2
U
3
U
0
T
0
/2
T
1
T
2
T
0
/2
СЕКТОР 2
P
1
P
3
P
5
P
2
P
4
P
6
T
0
/2
T
1
T
2
T
0
/2
T
s
U
0
U
4
U
7
U
3
Горњи
прекидачи
Доњи
прекидачи
T
s
U
7
U
0
T
0
/2
T
1
T
2
T
0
/2
СЕКТОР 3
U
4
U
3
P
1
P
3
P
5
P
2
P
4
P
6
T
0
/2
T
1
T
2
T
0
/2
T
s
U
0
U
4
U
7
Горњи
прекидачи
Доњи
прекидачи
T
s
U
7
U
0
T
0
/2
T
1
T
2
T
0
/2
СЕКТОР 4
U
4
U
5
U
5
P
1
P
3
P
5
P
2
P
4
P
6
T
0
/2
T
1
T
2
T
0
/2
T
s
U
0
U
6
U
7
Горњи
прекидачи
Доњи
прекидачи
T
s
U
7
U
0
T
0
/2
T
1
T
2
T
0
/2
СЕКТОР 5
U
5
U
5
U
6
P
1
P
3
P
5
P
2
P
4
P
6
T
0
/2
T
1
T
2
T
0
/2
T
s
U
0
U
6
U
7
Горњи
прекидачи
Доњи
прекидачи
T
s
U
7
U
0
T
0
/2
T
1
T
2
T
0
/2
СЕКТОР 6
U
1
U
6
U
1
P
1
P
3
P
5
P
2
P
4
P
6
Слика 36. Времена вођења прекидачких елемената у свих 6 сектора [17].
Конфигурације енергетских претварача у електромоторним погонима
34
Ако посматрамо први сектор видимо да за време једног прекидачког циклуса
T
s
прекидач Р1 има време вођења
Т
1
,
Т
2
, и
Т
0
/2 док њему инверзни прекидач Р2 има време
вођења
Т
0
/2, прекидач Р3 има време вођења
Т
2
, и
Т
0
/2 док њему инверзни прекидач Р4 има
време вођења
Т
1
и
Т
0
/2, прекидач Р5 има време вођења
Т
0
/2 док њему инверзни прекидач Р6
има време вођења
Т
1
,
Т
2
, и
Т
0
/2 и референтни вектор образују вектори
0
U
,
1
U
,
2
U
,
7
U
. Tакође
може се закључити са слике горе да се у два суседна прекидачка циклуса времена смењују
као одраз у „огледалу“. Целокупна представа ових графика са слике 36 је дата у табели 2 која
јасно показује времена вођења прекидачких елемената у секторима.
Табела 2. Времена вoђења прекидачких елемената по секторима [17].
СЕКТОР
ГОРЊИ
ПРЕКИДАЧИ
ДОЊИ
ПРЕКИДАЧИ
1
P1=T
1
+T
2
+T
0
/2
P2=T
0
/2
P3=T
2
+T
0
/2
P4=T
1
+T
0
/2
P5=T
0
/2
P6=T
1
+T
2
+T
0
/2
2
P1=T
1
+T
0
/2
P2=T
2
+T
0
/2
P3=T
1
+T
2
+T
0
/2
P4=T
0
/2
P5=T
0
/2
P6=T
1
+T
2
+T
0
/2
3
P1=T
0
/2
P2=T
1
+T
2
+T
0
/2
P3=T
1
+T
2
+T
0
/2
P4=T
0
/2
P5=T
2
+T
0
/2
P6=T
1
+T
0
/2
4
P1=T
0
/2
P2=T
1
+T
2
+T
0
/2
P3=T
1
+T
0
/2
P4=T
2
+T
0
/2
P5=T
1
+T
2
+T
0
/2
P6=T
0
/2
5
P1=T
2
+T
0
/2
P2=T
1
+T
0
/2
P3=T
0
/2
P4=T
1
+T
2
+T
0
/2
P5=T
1
+T
2
+T
0
/2
P6=T
0
/2
6
P1=T
1
+T
2
+T
0
/2
P2=T
0
/2
P3=T
0
/2
P4=T
1
+T
2
+T
0
/2
P5=T
1
+T
0
/2
P6=T
2
+T
0
/2
Индекс модулације се код SVPWM дефинише као однос референтног и максималног
неизобличеног напона (полупречник уписане кружнице у хексагон):
2
3
ref
DC
u
М
U
=
.
(35)
Максималне фазне и линијске вредности напона се могу приказати следећим изразом:

Конфигурације енергетских претварача у електромоторним погонима
36
Граница линеарне зоне модулације (Слика 38) дефинише се ободом кружнице уписане
у хексагон кога формира шест основних напонских вектора. На истој слици представљени су
напонски вектори инвертора и вредности искоришћености напона једносмерног међукола
U
DC
као и зона надмодулације ((OM) eng-
Overmodulation
) коју треба испунити да би се
добила максимална искоришћеност напона
U
DC
[12].
U
1
(100)
U
2
(110)
U
3
(010)
U
4
(011)
U
5
(001)
U
6
(101)
PWM (75%)
SVPWM (86%)
(100%)
Област Надмодулације
Слика 38. Напонски вектори инвертора и зона надмодулације [12].
Ради лакшег разумевања PWM-а (симетрична и асиметрична) и SVPWM-а касније у
раду ће бити приказане вредности излазних величина на DSP платформи коришћењем
Technosoft-ове дигиталне платформе MSK28335 са АCPM750 енергетским модулом који у
себи има интегрисан трофазни IGBT инвертор са два нивоа који се управља дигиталним
процесором сигнала ТМS320F28335.
4.5 PWM са додатком трећег хармоника
Још једна од многобројних метода управљања инверторима је и метода симетричне
PWM са додатком трећег хармоника ((THIPWM) eng.-
Third-Harmonic-Injection Pulse Width
Modulation
) све у циљу што веће искоришћености напона једносмерног међукола
U
DC
. Као
што је од раније познато PWM модулацијом је могуће остварити до 75% вредности напона
који се има при шестопулсном раду инвертора. Један од начина за повећање искоришћености
напона
U
DC
је додавање трећег хармоника синусном модулишућем сигналу и тако се добија
SPWM са додатком трећег хармоника.
На Слици 39 приказан је начин за добијање модулишућег сигнала са додатком трећег
хармоника.
Конфигурације енергетских претварача у електромоторним погонима
37
Слика 39. PWM са додатком трећег хармоника.
На слици су приказана два напонска сигнала. Амплитуда основног хармоника
модулишућег сигнала је обележена са испрекиданом линијом
v
(1)
. Трећи хармоник који се
додаје модулишућем сигналу исцртан је линијом црта-тачка-црта
v
(3h)
. На слици се јасно
види утицај трећег хармоника на основни хармоник тако што смањује његову амплитуду
v
mod(sin+3h)
.
Амплитуду трећег хармоника потребно је подесити на
1
6
од амплитуде основног
хармоника. До ове вредности,
1
6
од амплитуде основног хармоника дошло се полазећи од
услова да вредност амплитуде функције
( )
sin
sin 3
y t
A
=
+
буде максимална, где је
t
=
а коефициент
А
се прорачунава тако да
( )
y t
буде максимално. У [17] је детаљно
изведено да вредност амплитуде трећег хармоника уз поштовање наведеног услова износи
1
6
А
=
.
Присуство трећег хармоника омогућава да модулишући сигнал подесимо на већу
вредност амплитуде што излази из линеарне зоне модулације а присуство трећег хармоника
враћа у линеарну зону модулације. Са слике са јасно уочава да присуство трећег хармоника
нам даје могућност да модулишући сигнал подесимо на амплитуду веће вредности.
Тада се у крајњој тачки линеарног опсега рада модулатора, за
m
a
=1, добија амплитуда
основног хармоника излазног напона увећана за 15% у односу на PWM, или приближно 90%
искоришћење напонских могућности претварача и на овај начин је могуће поваћати
искоришћеност напона
U
DC
приближно оној вредности која се добија SVPWM [17].
Такође исти резултат се добија уколико уместо повећања амплитуде модулишућег
сигнала смањимо индекс модулације тј. амплитуду носећег сигнала (
m
=0.866).
v
mod(sin+3h)
v
(1)
v
(3h)
v
mod(sin+3h)
v
(1)
v
(3h)

Конфигурације енергетских претварача у електромоторним погонима
39
Надмодулациона област 1 приказана је на Слици 41.
U
1
(100)
U
2
(110)
U
3
(010)
U
4
(011)
U
5
(001)
U
6
(101)
U
0
(000)
U
7
(111)
U
r
*
U
r
θ
Слика 41. – Модификација реферетног напонског вектора у НМ1 [18].
У надмодулационој области 1 напонски вектор
U
r
прелази ивице хексагона у две тачке
у сваком сектору. Тада настају губици у виду пада напона у области где напонски вектор
U
r
напушта хексагон. Да би се надокнадили ти губици повећава се амплитуда напонског
вектора
U
r
у делу где овај вектор не напушта хексагон. Напонски вектор
U
r
делимично
пролази кроз хексагон а делимично ван њега. Трајекторија модификоване амплитуде
референтног вектора приказана је на Слици 41. При угловима референтног вектора где се он
налази унутар хексагона само активни напонски вектори су укључени (без нултог). Времена
вођења ових вектора одређена са
t
1
и
t
2
дата су изразима у зависности од угла
α
:
1
3 cos
sin
3 cos
sin
s
t
T
−
=
+
(38)
2
1
s
t
T
t
= −
(39)
0
7
0
t
t
= =
(40)
Граница преласка из хексагона и напуштања његових ивица дефинисана је улом
θ
и
назива се гранични угао који зависи од вредности референтног напона. Као што се може
закључити горња граница за НМ1 је када је
θ=
0
°.
У том случају трајекторија напонског
вектора се креће по ивицама хексагона. Амплитуда основног хармоника тако добијеног
напона чини 95% од правоугаоног напона при чему се има индекс модулације од
М=
0,907.
За индексе модулације изнад
М=
0,907 примењује се област НМ2. Област НМ2
приказана је на Слици 42 [18].
Конфигурације енергетских претварача у електромоторним погонима
40
U
1 (1 00)
U
2
(1 10)
U
3
(0 10)
U
4
(0 11)
U
5
(0 01)
U
6
(1 01)
U
0
(000)
U
7
(111)
U
r
*
U
r
h
h
*
Слика 42. – Модификација реферетног напонског вектора у НМ2 [18].
У НМ2 модификује се не само амплитуда већ и фазни став референтног напонског
вектора. Угао референтног вектора је промењен са α на α*. Трајекторија референтног вектора
се креће по страници хексагона док се модификовани угао рачуна по следећим изразима:
0
0
за
/ 3
/ 6
6
/ 3
/ 3
/ 3
h
h
h
h
h
h
−
=
−
−
−
(41)
где је α
h
– угао држања.
Овако рачунат угао директно утиче на фундаменталну вредност излазног напона и
нелинеарна је функција индекса модулације
М
.
На Слици 42 приказан је референтни напонски вектор у првом сектору. Добијена
трајекторија може се поделити на три дела. Први део, ако је угао α
мањи од α
h
алгоритам
држи вредност модификованог референтног вектора у темену вектора
U
1
. Следећи део важи
за α
које се креће од α
h
до π/3-α
h
. У овом улговном опсегу модификовани вектор се креће
страницом хексагона. У последњем делу од π/3-α
h
до α
h
вредност модификованог
референтног вектора се држи у следећем темену тј.
U
2
.
Област НМ2 ради до области шестопулсног рада односно при индексу модулације
М=
1. Карактеристичност шестопулсног рада је као што је већ објашњено је прелазак из
једног темена хексагона у суседни са шестином фундаменталне фреквенције при чему се
добија максимално могући излазни напон инвертора тј. 2/3
U
DC
.

Конфигурације енергетских претварача у електромоторним погонима
42
Слика 45. Импулсно ширинске модулације хистерезисном методом.
Уколико струја мотора порасте изнад горње границе хистерезисног појаса горњи
прекидач инвертора са Слике 17 који одговара фази посматране струје мотора прелази у
стање OFF а доњи прекидач исте фазе у стање ON. Као резултат овога, амплитуда излазног
напона пада са своје највише вредности која износи +0,5
U
DC
на најнижу вредност -0,5
U
DC
.
Када струја спадне испод доњег прага хистерезисног појаса прекидачи замене стања и струја
поново почне да расте.
Посматрајући све ово јасно се види да наизменичним укључивањем и искључивањем
полупроводничких елемената струја мора да прати облик синусне референтне струје унутар
хистерезисног појаса [19].
Када се горњи прекидач P1 са Слике 17 налази у стању вођења, позитивни и негативни
нагиб струје могу се одредити помоћу израза:
( )
0,5
sin
,
−
=
DC
emf
U
U
t
di
dt
L
(42)
где је 0,5
U
DC
неки напон,
U
emf
sin(ωt) тренутна вредност електромоторне силе мотора, а
L
представља укупну индуктивност терета.
Инвертор се тада понаша као струјни извор који генерише струју чија је флуктуација
одређена само ширином хистерезисног појаса.
Приликом сваког преласка прекидачких елемената из стања ON у стање OFF треба
поставити одговарајуће време – мртво време (eng- (
deаd time
)) [19].
4.8 Мртво време
За инверторе који излазни напон генеришу помоћу неких од наведених типова
модулације неопходно је обезбедити извесно време током кога су искључена оба прекидача
на једној фази инвертора, како би се избегло да истовремено воде оба прекидача тј. кратак
спој на једносмерном међуколу [20].
Конфигурације енергетских претварача у електромоторним погонима
43
Током трајања мртвог времена напон инвертора је неуправљив. Поларитет напона је
одређен смером струје а амплитуда излазног напона је одређена напоном једносмерног
међукола. Током мртвог времена струја може тећи само кроз повратне диоде. За време
трајања мртвог времена без обзира на смер струје, долази до смањења амплитуде струје фазе
инвертора, независно од референтне вредности струје.
Ако је струја фазе блиска нули на почетку мртвог времена, онда она опада на нулу и не
мења вредност током остатка мртвог времена. Изобличења фазне струје инвертора су
најизраженија када струје фазе пролазе кроз нулу и при малим вредностима учестаности
напона [20].
Утицај мртвог времена на излазни напон инвертора објашњен је на примеру једне гране
трофазног инвертора, што је приказано на Слици 46а. Приказан је изглед референтног
напона
U
ref
за који се претпоставља да је константнан током једне прекидачке периоде.
Битне су тачке пресека два напона
U
ref
и
U
noseće
јер у тим тачкама прекидачки елементи
мењају своје стање. Управљачки сигнали за горњи прекидач P1 и доњи P2 су приказани на
Слици 46б.
U
DC
A
i
a
P1
P2
а)
P1
P2
t
u
ref
u
noseće
u
PWM
Δ
t
P1
Δ
t
P2
t
t
t
t
u
PWM
u
PWM
u
PWM
t
t
D2
D1
U
AN
U
AN
Dead time
=0s
Dead time
=0s
Пад напона
Пораст напона
Dead time
=0s
Dead time
=0s
(
i
a
> 0)
(
i
a
<0)
N
Са Dead time
Са
Dead time
б)
в)
г)
д)
Слика 46. Мртво време -
Dead timе
[20].

Конфигурације енергетских претварача у електромоторним погонима
45
5. МОДЕЛОВАЊЕ ИНВЕРТОРА СА ДВА НИВОА У
MATLAB/SINULINK-У
У MATLAB/SINULINK-у је моделован и приказан један напонски инвертор са два
нивоа (Слика 47). На овом моделу биће представљене неке методе управљања инвертором
које су биле представљене у овом раду. Биће разматрана PWM модулација (симетрична и
асиметрична), SVPWM као и PWM са додатком трећег хармоника.
Слика 47. Инвертор са два нивоа у MATLAB/SIMULINK-у.
Напонски инвертор је напајан напоном једносмерног међукола
U
DC
. На Слици 47 су
приказани 6 IGBT транзистора који на своје
gate
-ове примају сигнале из блока
PWM/SVPWM. На Слици 48 је приказан блок PWM/SVPWM који се бави добијањем
управљачких сигнала уз различите технике модулације.
Слика 48. Блок PWM/SVPWM.
Конфигурације енергетских претварача у електромоторним погонима
46
Овде се може видети како се једноставним пребацивањем преклопке може одабрати да
ли ћемо користити тестерасти носећи сигнал (асиметрична PWM) или троугаони носећи
сигнал (симетрочна PWM) која са референтним напоном генеришу PWM сигнал. Такође,
овде је дата и могућност да се подеси да је референтни сигнал са додатком трећег хармоника.
Друга преклопка омогућава одабир SVPWM. Такође, на излазу се налазе блокови којима се
додаје
dead time
.
На Слици 49 приказана је раализација блока за мерење карактеристичних величина.
Слика 49. Блoк за мерење.
У овом блоку ће се извршавати сва мерење и графички ће бити исцртане све жељене
вредности напона. Када је реч о линијским и фазним напонима битно је напоменути да се
фазни напони добијају тако што се напони мере у односу на неутралну тачку „нулу“ мотора.
Пошто то у овом случају није могуће (инвертор нема додира са нултом тачком мотора) било
је потребно да се из линијских напона
U
ab
,
U
bc
и
U
ca
изведу фазни напони
U
a
,
U
b
и
U
c
што је
урађено на следећи начин:
Познато је да :
0
a
b
c
U
U
U
+
+
=
,
(44)
0
ab
bc
ca
U
U
U
+
+
=
,
(45)
ab
a
b
U
U
U
=
−
,
(46)
bc
b
c
U
U
U
= −
,
(47)
ca
c
a
U
U
U
= −
.
(48)
Из релације (45) следи да је :
ab
ca
bc
U
U
U
+
= −
,
(49)
ab
ca
cb
U
U
U
+
=
,
(50)
ab
ca
c
b
U
U
U
U
+
= −
,
(51)

Конфигурације енергетских претварача у електромоторним погонима
48
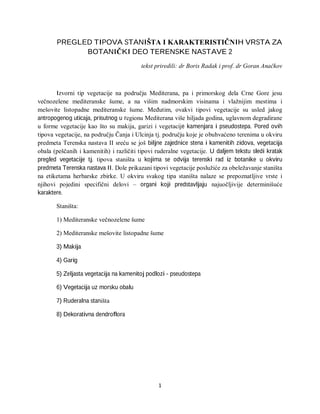
Слика 50. Излазни фазни напон код симетричне PWM.
Слика 51. Фуријеова анализа фазног напона симетричне PWM.
230 V
207 V
155 V
1/3 U
DC
2/3 U
DC
Конфигурације енергетских претварача у електромоторним погонима
49
На Слици 52 приказан је излазни линијски напон код симетричне PWM са својом
фундаменталном компонентом (269V), као и његова Фуријеова анализа (Слика 53).
Слика 52. Линијски напон код симетричне PWM.
Слика 53. Фуријеова анализа линијског напона симетричне PWM.
U
DC
=310V
269 V
Конфигурације енергетских претварача у електромоторним погонима
51
На Слици 56 приказани су излазни фазни напони код SVPWM-а са референтним (230
V), основном (179V) компонентом као и одговарајућа Фуријеова анализа (Слика 57).
Слика 56. Фазни напони код SVPWM.
Слика 57. Фуријеова анализа код SVPWM.
230 V
207 V
179 V
2/3 U
DC
1/3 U
DC
Конфигурације енергетских претварача у електромоторним погонима
52
На Слици 58 приказан је излазни линијски напон код SVPWM, као и одговрајућа
Фуријеова анализа (Слика 59).
Слика 58. Линијски напон код SVPWM.
Слика 59. Фуријеова анализа линијског напона за SVPWM.
U
DC
=310 V

Конфигурације енергетских претварача у електромоторним погонима
54
Како би се и у овом симулационом делу поставила паралела између PWM и SVPWM у
погледу већег искоришћења напона једносмерног међукола и потврдила изнета теоријска
основа да је веће искоришћење напона једносмерног међукола код SVPWM направићемо
осврт на Слике 50 и 56 са којих се виде вредности првих хармоника
U
1har.f
код PWM износи
155V и
U
1har.f
код SVPWM износи 179V. Када се постави однос ове две вредности:
1
.
1
.
179
1,154
155
har f
har f
U
SVPWM
U
WM
V
P
V
−
=
=
−
,
(63)
На овај начин је потврђена чињеница искоришћење напона једносмерног међукола код
SVPWM веће за 15%.
Велики утицај на вредност излазног напона има мртво време тако да на следећем
примеру дата слика симетричне PWM (фазни напон
U
a
) са
dead time
од 0μs (Слика 62) и са
dead time
20 μs (Слика 63).
Слика 62. Фазни напон код симетричне PWM са
dead time
0 μs.
Слика 63. Фазни напон код симетричне PWM са
dead time
20 μs.
На Сликама 64 и 65 дата је увећана представа фазних напона са
dead time
0 μs и 20 μs.
Конфигурације енергетских претварача у електромоторним погонима
55
Слика 64. Увећана представа фазног напона са dead time 0 μs.
Слика 65. Увећана представа фазног напона са
dead time
20 μs.
Са Слика 64 и 65 виде се јасне разлике у пулсевима у виду пикова који се појављују код
dead time
20 μs за период PWM од 250 μs (4kHz). Анализа фундаменталних вредности напона
и THD-а при SPWM, APWM и SVPWM при различитим временима за
dead time
су дати у
Табели 3.
Табела 3. Фундаменталне вредности напона и THD-а при SPWM, APWM и SVPWM
при различитим временима за
dead time.
Dead
time[μs]
SPWM
APWM
SVPWM
U
f [V]
U
l [V]
U
f [V]
U
l [V]
U
f [V]
U
l [V]
THD[%] THD[%] THD[%] THD[%] THD[%] THD[%]
0
155.3
269
155.2
268.9
179.3
310.6
68.56
68.58
68.61
68.61
52.29
52.28
1
155.2
268.9
155.2
268.9
179.2
310.4
67.86
67.86
68.29
68.29
51.63
51.63
5
154.6
267.7
154.5
267.6
178
308.3
65.42
65.42
67.45
67.44
46.69
49.7
10
153.2
265.4
153.2
265.3
175.7
304.3
62.82
62.83
66.89
66.87
48.06
48.08
20
149.5
258.9
149.4
258.8
169.3
293.1
58.49
58.51
66.9
66.9
46.39
46.42
30
144.8
250.7
144.7
250.6
162.3
280.9
54.91
54.95
61.95
61.96
45.28
45.33

Конфигурације енергетских претварача у електромоторним погонима
57
На Слици 68 приказан је линијски напон код PWM-а са додатком трећег хармоника
као и одговрајућа Фуријеова анализа (Слика 69).
Слика 68. Линијски напон код PWM-а са додатком трећег хармоника.
Слика 69. Фуријеова анализа линијског напона код PWM- са додатком трећег хармоника.
Ако се сад упореде фундаменталне вредности напона
1
.f
har
U
за PWM, SVPWM и PWM
са додатком трећег хармоника јасно се може закључити да PWM са додатком трећег
хармоника даје 15% веће искоришћење напона једносмерног међукола у односу на PWM тј.
да је приближна вредности која је добијена SVPWM модулацијом што је и приказано у
Табели 4.
310 V
Конфигурације енергетских претварача у електромоторним погонима
58
Табела 4. Фундаменталне вредности фазног и линијског напона за PWM са додатком
трећег хармоника и њихови THD-ови.
Dead
time =
0μs
Фундаменрална
вредност фазног
напона [V]
THD
[%]
Фундаменрална
вредност
линијског
напона [V]
THD
[%]
PWM
155.3
68.56
260
68,58
PWM +
3.
хармоник
179,3
52,99
310,6
52,28
SVPWM
179,3
52,29
310,6
52,28
5.1 Моделовање рада машине при континуалном и PWM напајању
Данашњи регулисани електромоторни погони се најчешће напајају преко енергетских
претварача који им омогућавају промену фреквенције употребом импулсно ширинске
модулације. Из тог разлога корисно је видети каква је разлика у квалитету одзива машине
наизменичне струје (асихроне машине) када она ради на контунуалном (мрежном) напајању
и уколико се напаја преко енергетског претварача (инвертора). Модел асинхроне машине
која се напаја преко контунуалног напајања (из мреже) и преко инвертора са PWM
модулацијом релазован је у MATLAB/Simulink-у и приказан је на слици 70.
Слика 70. Модел асинхроне машине која се напаја преко контунуалног напајања (из
мреже) и преко инвертора са PWM модулацијом

Конфигурације енергетских претварача у електромоторним погонима
60
Рипл струје зависи од фреквенције импулсно ширинске модулације као и од параметара
машине као што су расипна индуктивност статора итд.
6. ЕКСПЕРИМЕНТАЛНИ ДЕО
Код дигиталних система код DSP-а носећег сигнала се дефинише као вредност бројача
чија се вредност увећава са тактом процесора. Носећи сигнал се генерише аутоматски у
PWM модулатору у DSP-у. Ради лакшег разумевања биће поновљена слика 34.
t
t
PWM
T
s
2T
s
3T
s
4T
s
t
P1
t
P1
t
P1
t
P1
t
t
T
s
2T
s
3T
s
4T
s
U
noseće
up/
down
mode
t
P1
t
P1
t
P1
t
P1
период
бројача
вредност за
поређење
U
noseće
up
mode
период
бројача
вредност за
поређење
PWM
Слика 34. PWM у зависности од носећег сигнала [12].
Носећи PWM сигнал генерише
PWM timer
у
up mode
-у ако се жели тестерасти носилац
или у
up/down mode
-у ако се жели троугаони носилац. Одговарајући регистри бројача
дефинишу карактеристике и период носећег сигнала а вредност модулишућег сигнала се
уписује у регистре за поређење. У тренуцима када се изједначе вредности модулишућег
сигнала и носећег сигнала генерише се стање логичке 0 (OFF) или стање логичке 1 (ON) у
зависности од подешења регистара за поређење. На овај начин дефинише се поворка
импулса чија ширина зависи од вредности модулишућег сигнала [22].
У овом екперименталном делу ће бити приказани PWM сигнали (симетрична и
асиметрична PWM) за дигталну контролу мотора. Користићемо Technosoft уређај MSK28335
са АCPM750 модулом који у себи има интегрисан трофазни IGBT инвертор на који је
прикачена плоча ТМS230OF28335 (Слика 73) [23]. Детаљнији подаци овог дигиталног
система могу се пронаћи у прилозима. Са плоче ТМS230OF28335 ће се вршити мерења
осцилоскопом.
Конфигурације енергетских претварача у електромоторним погонима
61
Слика 73. МSК28335 [23].
За прикупљање података мерења коришћен је двоканални осцилоскоп чији су подаци
дати у прилогу. Напајање се доводи на доњу плочу АCPM750 и то на контакте Ј5 као што је
приказано на Слици 73 (мора се водити рачуна о плус крају на конектору). Напајање се врши
преко претварача 220V AC/5V DC. Комуникација са рачунаром је остварена преко серијског
улаза RS232.
Са плоче ТМS230OF28335 (Слика 74) ћемо вршити мерења и тако што ћемо пронаћи
контакте Ј4 (
Ј4 Extension BUS 4
) (Слика 75) и на њима се налазе излазни пинови за које
качимо пипалице осцилоскопа. На осцилоскопу снимамо слику PWM сигнала.
Слика 74. DSP плоча ТМS230OF28335 [23].

Конфигурације енергетских претварача у електромоторним погонима
63
На екрану ће се приказати прозор (Слика 77) на коме је потребно одабрати поње
6 PWM
outputs Dead Band Logic
после чега се наставља са радом у апликацији.
Слика 77. Procesor Evaluation Control Panel прозор.
Кроз ову апликацију ћемо се упознати са поступак генерисања симетричне PWM,
асиметричне PWM као и SVPWM.
Пре почетка рада потребно је одабрати да ли ћемо посматрати асиметричну PWM,
симетричну PWM или SVPWM на горњем делу панела на слици 78.
Слика 78. Панел за модификовање параметара за асиметричну PWM са свим ознакама.
Конфигурације енергетских претварача у електромоторним погонима
64
Као што се може видети на Слици 78 панел је намењен крајњем кориснику који
једноставним померањен клизача може задавати жељену фреквенцију (1-40KHz), као и
жељену ширину импулса по свакој од 3 фазе инвертора. На основу ових параметара програм
дефинише PWM сигнале са жењеним испунама.
Клизачем је на овом примеру подешена вредност фреквенције PWMа на 20 kHz. Унета
вредност практично је записана у процесору као хексадецимална вредност и дефинише
максималну вредност бројача, након чега се бројач ресетује и почиње да броји од нуле –
up
mode
за асиметричну PWM [22]. Исто ово важи и за ширину импулса. Једноставним
померањем клизача поставља се жељена (хексадецимална) вредност која се уписује у
регистре за поређење.
У овом примеру асиметрична PWM ширина импулса је постављена на 70% и види се у
делу за визуелни приказ како то изгледа. Мерења и приказ PWM-а се снимају помоћу
осцилоскопа (Слика 79) и мерења су извршена на једној фази инвертора са два нивоа (P1 и
Р2).
Слика 79. (лево)-PWM сигнал прекидача Р1 (жута) и PWM сигнал прекидача Р2 (плава),
(десно)-мртво време.
Са слике 72 се види да они раде у инверзном режиму тј. док прекидач Р1 води Р2 је
искључен. Такође се види и вредност ширине импулса која је изражена у процентима 69.6%
(≈70%) за прекидач Р1 и 29,8% (≈30%) за прекидач Р2. У једном малом делу времена у
једном прекидачком циклус
T
s
и један и други прекидач су у OFF режиму тј. то време за које
су они у OFF је
dead time
.
Dead time
које је измерено износи 136ns.
Када је реч о асиметричној PWM извршена су мерења на две различите фазе
инвертора (на прекидачима Р1 и Р3- прва и друга фаза инвертора). На панелу је дефинисана
ширина импулса једне фазе са 70 % (црвена линија) и ширина импулса друге фазе са 40%
(зелена линија) Слика 80.

Конфигурације енергетских претварача у електромоторним погонима
66
Слика 82. Изглед панела за симетричну PWM.
Клизачем је и на овом примеру подешена вредност на 20 кHz за фреквнецију PWMа.
Такође ова вредност је записана као хексадецимлана чиме је одређена максимална вредност
бројача који броји од нуле до задате вредности и назад до нуле –
up/down mode
за
симетричну PWM. Ширина импулса је подешена на 60% првој фази и 30% на другој фази и
мерења су извршена на две фазе инвертора тј. на прекидачима Р1 и Р3.
При оваквим подешењима снимљени су следећи резултати са осцилоскопа (Слика 83).
Слика 83. Симетрична PWM- сигнали две фазе инвертора.
Конфигурације енергетских претварача у електромоторним погонима
67
Уколико се жели рад са SVPWM потребно је одабрати картицу
Space Vector PWM
. На
Слици 84 је приказан панел за подешавање потребних величина.
Слика 84. Панел за подешавање величина за SVPWM
За разлику од симетричне и асиметричне PWM код SVPWM-а потребно је подесити две
вредности за поређење које дефинишу времена Т1 и Т2 (32)-(33).
У пољу PWM_PERIOD се једноставним померањем клизача поставња жељена
фреквенција SVPWM модулације што у овом примеру износи 20KHz.
У пољу Space vector Parameters маркирањем поља CW бирамо смер обртања вектора, у
пољу
θ
дефинишемо угао а у пољу
ρ
дефинишемо ампитуду резултујућег напонског вектора.
У делу за визуелни приказ могу се уочити 6 основних напонских вектора. Тамно сивом
бојом је означен обод који означава зону надмодулације, референтни вектор којим се
управља је означен црвеном бојом и у овом примеру се налази у првом сектору, угао је 35
о
а
амплитуда је подешена на 0,661 од
6
max
STEP
F
U
−
. Као што је раније познато да код SVPWM-а да је
максимална фазна вредност излазног напона 0,866 од
6
max
STEP
F
U
−
ова апликација ограничава
максималну амплитуду на 0,8 од
6
max
STEP
F
U
−
.
Времена Т1 и Т2 се аутоматски прорачунавају тј. DSP аутоматски прорачунава ова
времена у односу на горе подешене вредности одговарајућих регистара.
Велика предност ове апликације је што је омогућено да се курсором миша може
ухватити врх референтног вектора и поставити га у одређени положај и DSP ће аутоматски
прорачунати све параметре који су наведени.
Све апликације су писане у C коду и сваке измене и проширења која су потребна
могуће је променити у односу на основна подешења директним мењањем делова кода.
При раду на снимању одзива код SVPWM-а дошло се до одређених
1
одтупања у односу
на оно што је приказано на апликацији па ће даље разматрање SVPWM-а бити предмет неких
других радова и изучавања.
1
Графичка репрезентацјиа просторног напонског вектора са слике 77 није у сагласности са
генерерисаним мереним сигналима. Времена вођена појединих прекидача односно основних напонских вектора
не одговарају приказаној слици. Узорк овога је највероватније грешка у изради апликације односно графичке
репрезентације просторног напонског вектора од старне Technosofta. Ово ће бити проверено при неком од
наредних радова везаних за ову тему.

Конфигурације енергетских претварача у електромоторним погонима
69
7. ЗАКЉУЧАК
У овом раду изнет је преглед поделе као и конфигурације енергетских претварача који
се најчешће сусрећу у електромоторним погонима. Овим радом обухваћени су директни
претварачи (циклоконвертор, матрични конвертори) и индиректни претварачи који се састоје
од три дела: од исправљача, једносмерног међу кола и инвертора. О сваком овом елементу
индиректног претварача дате су конструкцијске карактеристике. као и типови.
Посебан акценат стављен је на инвертор као основни елемент претварача који се данас
користе у регулацији електромоторних погона са машинама наизменичне струје као и
прегледу типова инвертора и метода управљања односно модулације. Описан је рад
инвертора са два нивоа, а показани су и инвертори са више нивоа, њихове разлике као и
предности и мане. Ради лакшег разумевања метода управљања инвертором у овом раду је
коришћен напонски инвертор са два нивоа. Приказане су само неке од основних метода
управљања као што су PWM (симетрична и асиметрична), SVPWM, PWM са додатком трећег
хармоника и делта модулације. Наведене методе се користе у зони линеарне модулације а
анализирана је и зона надмодулације која дефинише нелинеану зону модулације. Такође,
објашњен је и појам мртвог времена који има велики значај на облик излазног напона
инвертора који напаја мотор.
Пошто је био разматран инвертор са два нивоа, максимални фазни излазни напон који
се добија на излазу инвертора је 2/3 од вредности напона једносмерног међукола. Циљ
анализираних метода модулације је да се добије што веће искоришћење напона једносмерног
међукола. Анализирајући ове методе импулсно ширинске модулације наглашен је закључак
да се методом SVPWM добија највеће искоришћење напона једносмерног међу кола као и
методом PWM са додатком трећег хармоника у односу на симетричну PWM. Ако се жели
постићи максимално искоришћење напона међукола мора се позабавити радом у области
надмодулације.
Изнете теоријске чињенице су потврђене симулационим примером у коме је моделован
инвертор са два нивоа са PWM-ом (симетрична и асиметрична), SVPWM-ом, PWM-ом са
додатком трећег хармоника у MATLAB/SIMULINK-у. У овој симулацији дата су поређења
линијских и фазних напона у свим методама као и утицај мртвог времена на излазни напон
инвертора.
Поред овога, у делу рада који се бави експерименталним резултатима објашњена је
Technosoft-ова апликација у којој је могуће посматрање PWM сигнала генерисаних
различитим методама на осцилоскопу као и једноставна промена испуне и фреквенције
PWMа. Анализирана су три типа модулације, демонстриране њихове сличности и разлике и
снимљено мртво време између два прекидача у истој грани инвертора.
У овом раду су јасно наглашене предности и недостаци различитих конфигурација
инвертора као и метода импулсно ширинске модулације. Изнета анализа у погледу техника
модулације у овом раду првенствено је битна код имплементације различитих алгоритама
управљања моторима наизменичне струје у области слабљења поља где је изражен проблем
напонског лимита односно потребе за што већим искоришћењем напона једносмерног
међукола при високим брзинама мотора.
Конфигурације енергетских претварача у електромоторним погонима
70
8. ПРИЛОГ
Табела 5. Основни подаци осцилоскопа и DSP уређаја.
ОСЦИЛОСКОП
DSP УРЕЂАЈ
Произвођач
Tektronix
Произвођач
Technosoft
Модел
TDS2012C
Модел
МSК28335
100 МHz
фреквенцијски опсег
2x12-битни прецизни D/А излази
2 Канала
128k Word - екстерне РАМ меморије
Активни TFT color екран од
5,7 инча (144 mm)
Процесор
ТМS320F2812 DSP на 150 МHz
Кориснички интерфејс на
више језика
Kомуникација преко RS-232
Снимање више таласних
облика на USB меморијском
уређају
Енергетски модул
ACPM750 , 3-фазни, са 6 ИГБТ
прекидача, 750W, 4A
Дужина записа на свим
каналима- 2.5k тачка

Конфигурације енергетских претварача у електромоторним погонима
72
[13] Владимир Катић, Факултет техничких наука, Нови Сад, Србија и Саша Николић,
Термоелектрана Гацко, Гацко, БиХ „
Директна контрола момента асинхроног мотора
напајаног инвертором са три нивоа са константном фреквенцијом прекидања
“
ИНФОТЕХ, Јахорина, 2007.
[14] Bose, B.K.,
Modern Power Electronics and AC drives
, Prentice Hall Inc., 2005.
[15] Vintoh, K.K., et al.,
Simulation and comparison of SPWM and SVPWM control for three
phase inverter
, ARPN Journal of Engineering and Applied Sciences, 2010.
[16] Zhou, K., D. Wang,
Relationship Between Space-Vector Modulation and Three-Phase
Carrier-Based PWM: A Comprehensive Analysis
, IEEE Transactions on Industrial
Electronics, 2002.
[17] Phuong Hue Tran
„Мatlab/simulink implementation and analysis of three pulse-width-
modulation (pwm) techniques“
Boise State University, 2012.
[18] Marcin Żelechowski, M. Sc. “
Space Vector Modulated – Direct. Torque Controlled
(DTC-SVM), Inverter – Fed Induction Motor Drive
”, Докторска дисертација,
Електротехнички факултет универзитета у Варшави, 2005.
[19] Александар Ацо Марковић „
Развој алгоритма модулације просторног вектора напона
за примјену у електромоторним погонима
“, Завршни рад, Електротехнички факултет,
Универзитет у Бања Луци, 2014.
[20] Веран В. Васић, „
Анализа ефекта мртвог времена на стабилност фреквентно
регулисаног електромоторног погона са асинхроним мотором
“ Магистарски рад,
Електротехнички факултет, Универзитет у Београду, 1996.
[21] ABB, Guide to Harmonics with AC Drives, Technicall Guiide No. 6, 2002.
[22] Рoсић, М., Бjeкић, M, Божић, М. „Meтoдe импулснo ширинскe мoдулaциje крoз
имплeмeнтaциjу нa DSP TMS320F2812”,
Зборник радова
4. Интернационалне
конференција Техника и Информатика у Образовању - ТИО2012,
Teхнички фaкултeт
Чачак, стр. 200-207, ISBN: 978-86-7776-138-7, UDK:004::621.313/314, 1-3. Јун, 2012
[M63].
[23]https://www.technosoftmotion.com/en/tools/professional-kits-with-apps/induction-motor-
control-kits/mck28335-kit-c-pro-ms-im, доступно, септембар 2018.