SVEU
Č
ILIŠTE U ZAGREBU
FAKULTET ELEKTROTEHNIKE I RA
Č
UNARSTVA
DIPLOMSKI RAD br. 1697
PRIMJENA METODE ZASNOVANE NA
SLAGANJU UZASTOPNIH MJERENJA
SENZORA UDALJENOSTI U PRA
Ć
ENJU
GIBANJA LJUDI U OKOLINI MOBILNOG
ROBOTA
Davor Graovac
Zagreb, srpanj 2009.
Zahvaljujem prof. dr. sc. Ivanu Petrovi
ć
u na pomo
ć
i i mentorstvu.
Tako
ñ
er zahvaljujem znanstvenom novaku Sre
ć
ku Juri
ć
-Kavelju na svakodnevnoj
pomo
ć
i i na konstruktivnim prijedlozima tijekom izrade rada.
Zahvaljujem svojoj obitelji i Aniti na potpori.
Sadržaj
1.
UVOD ........................................................................................................................... 1
2.
SLAGANJE UZASTOPNIH O
Č
ITANJA LASERSKOG SENZORA
UDALJENOSTI................................................................................................................... 3
2.1.
K
ORELACIJSKA METODA SLAGANJA UZASTOPNIH O
Č
ITANJA LASERSKOG SENZORA
UDALJENOSTI
...................................................................................................................... 5
2.1.1. Izrada histograma ............................................................................................... 5
2.1.2. Korelacija histograma......................................................................................... 8
2.2.
K
ORELACIJSKA METODA S PRORA
Č
UNOM RELATIVNE ROTACIJE U
H
OUGHOVOM
PROSTORU
......................................................................................................................... 10
2.2.1. Prora
č
un rotacije u Houghovom prostoru ........................................................ 11
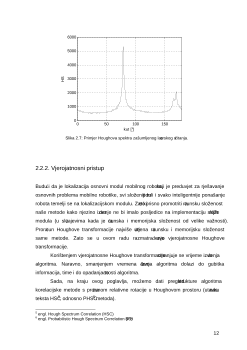
2.2.2. Vjerojatnosni pristup ......................................................................................... 12
2.3.
S
LAGANJE UZASTOPNIH O
Č
ITANJA LASERSKOG SENZORA U
H
OUGHOVOM PROSTORU
14
2.3.1. Prora
č
un translacije u Houghovom prostoru ................................................... 14
2.4.
M
ETRIC
-
BASED METODA SLAGANJA UZASTOPNIH O
Č
ITANJA LASERSKOG SENZORA
UDALJENOSTI
.................................................................................................................... 19
3.
IMPLEMENTACIJA METODA SLAGANJA UZASTOPNIH O
Č
ITANJA
LASERSKOG SENZORA UDALJENOSTI NA MOBILNOM ROBOTU................. 20
3.1.
M
OBILNA PLATFORMA
............................................................................................... 21
3.1.1. SICK LMS200 Laserski senzor udaljenosti ....................................................... 21
3.1.2. Odometrija......................................................................................................... 23
3.2.
R
EDUKCIJSKI FILTAR
.................................................................................................. 25
4.
PRIMJENE METODA SLAGANJA UZASTOPNIH O
Č
ITANJA LASERSKOG
SENZORA UDALJENOSTI ............................................................................................ 26
4.1.
P
RA
Ć
ENJE GIBANJA LJUDI U OKOLINI MOBILNOG ROBOTA
.......................................... 26
4.2.
L
OKALIZACIJA ZASNOVANA NA SLAGANJU UZASTOPNIH O
Č
ITANJA LASERSKOG
SENZORA
........................................................................................................................... 28
4.2.1. Prora
č
un trenutnog položaja mobilnog robota................................................. 29
5.
REZULTATI.............................................................................................................. 30
5.2.
S
IMULACIJSKI EKSPERIMENTI
..................................................................................... 30
5.2.1. Usporedba rada HSC i HDC metoda u radnoj okolini s okomitim zidovima ... 30
5.2.2. Usporedba rada HSC i HDC metoda u radnoj okolini s okomitim zidovima, uz
prisutan šum mjerenja ................................................................................................. 32
5.2.3. Usporedba rada HSC i HDC metoda u radnoj okolini s ne okomitim zidovima
..................................................................................................................................... 35
5.2.4. Usporedba rada HSC i HDC metoda u radnoj okolini s ne okomitim zidovima,
uz prisutan šum mjerenja............................................................................................. 36
5.2.5. Usporedba rada HSC i PHSC metoda .............................................................. 39
5.2.6. Lokalizacija u radnoj okolini s okomitim zidovima........................................... 43
5.2.7. Lokalizacija u radnoj okolini s ne okomitim zidovima ...................................... 47
5.3.
E
KSPERIMENTALNI REZULTATI
.................................................................................. 49
5.3.1. Usporedba s MbICP-om u radnoj okolini s okomitim zidovima ....................... 49
5.3.2. Usporedba s MbICP-om u radnoj okolini s ne okomitim zidovima .................. 51
6.
ZAKLJU
Č
AK ............................................................................................................ 53
BIBLIOGRAFIJA ............................................................................................................. 54
SAŽETAK .......................................................................................................................... 56
ABSTRACT ....................................................................................................................... 57
ŽIVOTOPIS ....................................................................................................................... 58
DODATAK......................................................................................................................... 59
A
H
OUGHOVA TRANSFORMACIJA
..................................................................................... 59
B
D
ISKRETNA
H
OUGHOVA TRANSFORMACIJA
.................................................................. 60
C
V
JEROJATNOSNA
H
OUGHOVA TRANSFORMACIJA
.......................................................... 61
D
H
OUGHOV SPEKTAR
...................................................................................................... 62
Popis tablica
Tablica 3.1: Karakteristike SICK LMS 200 senzora. ............................................................... 22
Tablica 5.1: Statisti
č
ka analiza to
č
nosti rezultata dobivenih u 1. simulacijskom
eksperimentu. ............................................................................................................................ 31
Tablica 5.2: Statisti
č
ka analiza to
č
nosti rezultata dobivenih u 2. a) eksperimentu................. 32
Tablica 5.3: Statisti
č
ka analiza to
č
nosti rezultata dobivenih u 2. b) eksperimentu................. 33
Tablica 5.4: Statisti
č
ka analiza to
č
nosti rezultata dobivenih u 3. eksperimentu. .................... 36
Tablica 5.5: Statisti
č
ka analiza to
č
nosti rezultata dobivenih u 4. b) eksperimentu................. 38
Tablica 5.6: Statisti
č
ka analiza to
č
nosti rezultata dobivenih u 5. eksperimentu -1.dio........... 40
Tablica 5.7: Statisti
č
ka analiza to
č
nosti rezultata dobivenih u 5. eksperimentu-2.dio............ 41
Tablica 5.8: Kona
č
ni položaji dobiveni za razli
č
ite postavke algoritma, 6. a) eksperiment. .. 43
Tablica 5.9: Kona
č
ni položaji dobiveni za razli
č
ite postavke algoritma, 6. b) eksperiment. .. 46
Tablica 5.10: Kona
č
ni položaji dobiveni za razli
č
ite postavke algoritma, 7. eksperiment...... 47
Tablica 5.11: Kona
č
ni položaji, usporedba s MbICP-om (okomiti zidovi). ............................ 49
Tablica 5.12: Kona
č
ni položaj, usporedba s MbICP-om (ne okomiti zidovi).......................... 52