UNIVERZITET CRNE GORE
ELEKTROTEHNIČKI FAKULTET
Predlog distribuiranog algoritma za upravljanje formacijama
autonomnih plovila
-MASTER RAD-
Mitar Otašević
19.11.2024.
UCG,ETF
1 / 36
Uvod
▶
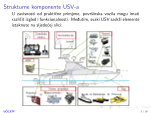
Predmet istraživanja Master rada su algoritmi za kooperativno
upravljanje formacijama umreženih potpogonjenih površinskih
vozila (USV).
▶
Istraživanja na ovom polju podstaknuta su rastućom potra-
žnjom za efikasnim i autonomnim plovilima za primjene u apli-
kacijama poput monitoringa stanja životne sredine, pretrage i
spasavanja, kao i u okeanografskim ispitivanjima.
▶
U ovom radu je predložen novi distribuirani algoritam za
pravolinijsko vođenje formacije umreženih autonomnih plovila.
UCG,ETF
2 / 36
Kooperativno upravljanje formacijama umreženih plovila
▶
Skup međusobno interagujućih autonomnih podsistema (ko-
pnena, podvodna, površinska i vazdušna vozila) raspoređenih
u određenoj konfiguraciji, čiji je cilj izvršenje zajedničkog za-
datka, definiše se kao formacija.
▶
Kooperativno praćenje putanje odnosi se na problem kretanja
formacije autonomnih plovila po referentnoj putanji.
UCG,ETF
4 / 36
Postavka problema i upravljački ciljevi
Neka se razmatra umreženi sistem plovila koji se sastoji od
N
USV-
ova, označenih od
0
do
N
−
1
. Zadatak je dizajnirati kooperativni
zakon vođenja, baziran na LOS principu, tako da se obezbijedi obra-
zovanje zadate formacije i njeno pravolinijsko vođenje referentnom
brzinom
U
ref
.
p
2
2
2
2
(
(
),
(
))
k
k
x
y
2
u
2
v
n
X
n
Y
2
2
U
*
2
x
D
*
2
y
D
1
1
1
1
(
(
),
(
))
k
k
x
y
0
0
u
0
U
0
v
0
0
0
0
(
(
),
(
))
k
k
x
y
*
1
y
D
*
1
x
D
1
u
1
v
1
U
1
UCG,ETF
5 / 36
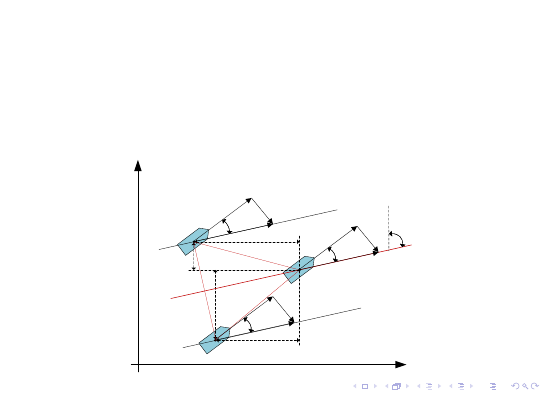
Postavka problema i upravljački ciljevi
Željena pozicija
i
-tog plovila u formaciji jednoznačno se može zadati
pomoću relativnih rastojanja
D
∗
xi
=
x
ki
(
ω
i
)
−
x
k
0
(
ω
0
)
i
D
∗
yi
=
y
ki
(
ω
i
)
−
y
k
0
(
ω
0
)
između
i
-tog USV-a i plovila
0
, u pravcu osa
x
n
i
y
n
, respektivno.
▶
Koristeći ovu notaciju upravljački ciljevi se mogu formalizovati
na sljedeći način:
lim
t
→∞
(
U
i
(
t
)
−
U
ref
) = 0
,
i
= 0
, . . . , N
−
1
,
lim
t
→∞
y
ei
(
t
) = 0
,
lim
t
→∞
x
ei
(
t
) = 0
,
lim
t
→∞
(
x
ki
(
ω
i
)
−
x
k
0
(
ω
0
)) =
D
∗
xi
,
lim
t
→∞
(
y
ki
(
ω
i
)
−
y
k
0
(
ω
0
)) =
D
∗
yi
.
UCG,ETF
7 / 36