1
INTERNACIONALANI UNIVERZITET TRAVNIK
SAOBRAĆAJNI FAKULTET TRAVNIK
U TRAVNIKU
SISTEM ZA UPRAVLJANJE KOD
MOTORNIH VOZILA
ZAVRŠNI RAD
Mentor: Student:
Travnik, 2016.
2
ZAVRŠNI RAD
SISTEM ZA UPRAVLJANJE KOD MOTORNIH VOZILA
SAŽETAK
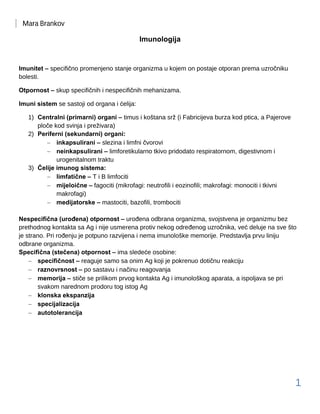
Sa stanovišta bezbjednosti saobraćaja upravljački mehanizmi spadaju u najvažnije uređaje na
motornom vozilu. Upravljački mehanizam ima zadatak da obezbjedi usmjeravanje
upravljačkih točkova i održavanja pravca u vrijeme kretanja vozila. Upravljački mehanizam
po pravilu djeluje na prednje točkove vozila. Kod vozila sa zavisnim sistemim oslanjanja
(teretna vozila i autobusi) upravljački mehanizam djeluje na točkove preko jednodijelne
popriječne spone, dok kod vozila sa nezavisnim oslanjanjem djeluje na točkove preko
višedjelne popriječne spone. Pored osnovnog uređaja za upravljanje koristi se dopunski ili
servo uređaj. Sistem za upravljanje vozilom je ključni element u interakciji između vozača i
vozila. Glavni zahtjev koji se očekuje od pomenutog sistema je da skretanje bude precizno.
Također, sistem mora da omogući vozaču da preko upravljača osjeti stanje kolovozne
površine i da upravljačke točkove nakon skretanja vrati u poziciju pravolinijskog kretanja.
Ključne riječi:
kretanje vozila, sistem za upravljanje, mehanizam, upravljački točkovi.
FINAL WORK
MANAGEMENT SYSTEM IN MOTOR VEHICLES
SUMMARY
From the standpoint of traffic safety control mechanisms are the most important devices in a
motor vehicle. The control mechanism has the task to provide guidance and steering wheels to
maintain the direction at the time of the vehicle. The control mechanism as a rule acts on the
front wheels of the vehicle. For vehicles with dependent suspension system (trucks and buses)
control mechanism acts on the wheels via a single-piece diagonally bonds, while in a vehicle
with independent suspension affects the wheels through a multi-part transversely clamps. In
addition to the basic unit for managing used complementary or power device. The system for
managing vehicles is a key element in the interaction between driver and vehicle. The main
requirement is expected from the said system is to turn it accurately. Also, the system must
allow the driver via the steering felt a state of pavement surface and steering wheels after
turning back to the position of linear movement.
Keywords:
movement of vehicles, management system, mechanism, steering wheels.
4
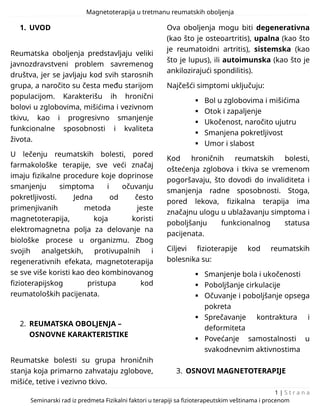
1. UVOD
Motor i njegovi podsistemi su zaduženi za pokretanje, kočnice za zaustavljanje, menjač za
prenošenje snage, kompjuter za kontrolu svih procesa, ali podjednako bitan sistem, odnosno
sklop u jednom automobilu jeste i sistem upravljanja. Kao što kaže slogan one poznate
kompanije – snaga je ništa bez kontrole. Stoga, bitna stavka čitavog sistema jeste upravljanje
vozilom, naravno, putem okretanja volana. On na prvi pogled djeluje jednostavno, međutim,
dosadašnji tekstovi u okviru sekcije TECH su nas naučili da danas više nema nijednog
jednostavnog sistema u motornom vozilu. Istina je da je bažičan koncept upravljanja vrlo
jednostavan, ali kako bi ujedno bio i efikasan, moralo se ipak malo zakomplikovati. U
narednim pasusima ćemo pokušati da vam bliže prikažemo sistem upravljanja vozilom.
Sa stanovišta bezbjednosti saobraćaja upravljački mehanizmi spadaju u najvažnije uređaje na
motornom vozilu. Upravljački mehanizam ima zadatak da obezbjedi usmjeravanje
upravljačkih točkova i održavanja pravca u vrijeme kretanja vozila. Upravljački mehanizam
po pravilu djeluje na prednje točkove vozila. Kod vozila sa zavisnim sistemim oslanjanja
(teretna vozila i autobusi) upravljački mehanizam djeluje na točkove preko jednodijelne
poprečne spone, dok kod vozila sa nezavisnim oslanjanjem djeluje na točkove preko
višedjelne popriječne spone.
Upravljački mehanizam po pravilu djeluje na prednje točkove vozila. Kod vozila sa zavisnim
sistemiom oslonjanja (teretna vozila i autobusi) upravljački mehanizam djeluje na točkove
preko jednodijelne popriječne spone, dok kod vozila sa nezavisnim oslonjanjem djeluje na
točkove preko višedijelne popriječne spone. Pored osnovnog uređaja za upravljanje koristi se
dopunski ili servo uređaj.
Funkciju i važnost uređaja za upravljanje biti će objašnjeno u nastavku diplomskog rada, kao i
cjeline od kojih se sastoji sistem za upravljanje vozilom.
5
2. FUNKCIJA SISTEM ZA UPRAVLJANJE MOTORNIM
VOZILOM
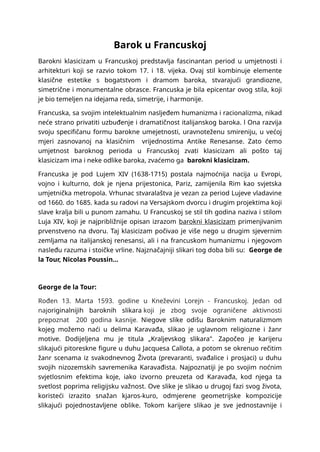
Sistem za upravljanje ima zadatak da mijenja i održava pravac kretanja vozila, te osigurava
neophodan manevar vozila. U opštem slučaju sistem za upravljanje se sastoji od sklopova
datih na slici 1.
Slika 1.
Strukturna shema upravljačkog mehanizma
UT upravljački točak,
UM upravljački mehanizam (MM - mehanički mehanizam, SM - servo mehanizam),
PM prenosni mehanizam,
IO izvr
š
ni organ (točkovi, gusjenice),
F
v
sila na upravlja kom to ku (hv odgovaraju i pomak upravlja kog to ka),
F
φ
- sila na to ku vozila (
α
u , v
ugao zakretanja vozila). Sl. 1.
Savremeni mehanizmi za upravljanje moraju ispuniti slijedeće zahtjeve:
a) Obezbijediti stabilno kretanje vozila prilikom vožnje u pravcu. Točak upravljača u
položaju pravolinijskog kretanja treba da ima minimalan slobodan hod.
b) Obezbijediti malu silu na točku upravljača (Fv): kod putničkih vozila 4-7 daN, a kod
teretnih vozila i autobusa 15-20 daN, a kod teretnih vozila većih nosivosti i do 30-40
daN.
c) Kinematika mehanizma za upravljanje mora biti takva da prilikom kretanja u krivini
osigura kotrljanje svih upravljačkih točkova vozila bez klizanja kako bi se spriječilo
brzo trošenje pneumatike.
d) Spontano vraćanje upravljačkih točkova po izlasku iz krivolinijskog u položaj
pravolinijskog kretanja pod dejstvom stabilizirajućeg momenta.
e) Mehanizam mora ublažiti udare izazvane neravninama puta, tako da se na točak
upravljača prenesu samo neznatne sile koje neće zamarati vozača i time smanjiti
sigurnost kretanja vozila.
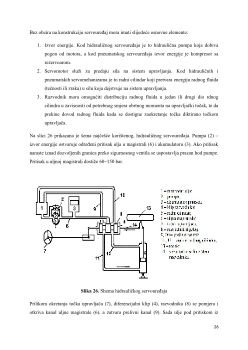
7
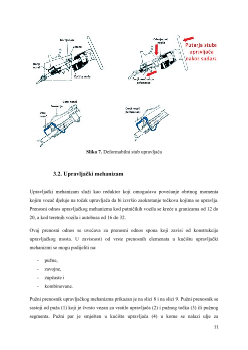
Slika 2.
Upravljanje vozilom sa krutim točkovima
Slika 3.
Kinematika zaokretanja sa jednakim uglovima zakretanja
Ovdje su prisutna dva centra okretanja (
O
S
i
O
U
– sl. 3). Sa ovim rješenjem bi se moralo
pojaviti i proklizavanje jednog od točkova, čime se narušava i zadano vođenje vozila u
krivini, tj. narušava mu se stabilnost, uz povećano trošenje pneumatika.