Univerzitet u Novom Sadu,
Fakultet tehničkih nauka, Katedra za Automatiku i upravljanje sistemima
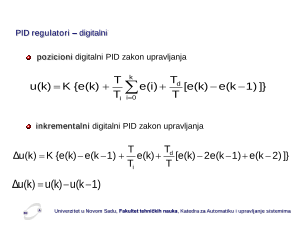
PID
regulatori
Univerzitet u Novom Sadu,
Fakultet tehničkih nauka, Katedra za Automatiku i upravljanje sistemima
UVOD
PID regulatori
su
našli široku primenu u procesnoj
industriji
zahvaljujući
jednostavnoj konstrukciji i
implementaciji u praksi
. Zato u prakti
čnoj upotrebi
imaju prednost u odnosu na savremena
rešenja
regulatora, sem u slu
čajevima kada rezultati pokažu
da nisu u stanju da zadovolje postavljene zahteve.
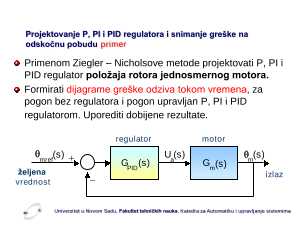
Teorija dobro poznatog PID zakona upravljanja bi
će
izlo
žena na opštem nivou pokrivajući kako zahteve
regulacije u procesnoj industriji tako i
regulaciju
elektromotornih pogona.
Univerzitet u Novom Sadu,
Fakultet tehničkih nauka, Katedra za Automatiku i upravljanje sistemima
Zakon upravljanja
Zakon upravljanja
predstavlja matematičku
zavisnost na osnovu koje
upravljački uređaj
obrađuje relevantne signale (informacije) i generiše
odgovarajuća
upravljačka dejstva
Najčešća forma ovakvih upravljačkih uređaja se
naziva
regulator
Kod
PID zakona upravljanja
njihovo dejstvo linearno
zavisi od
greške, njenog integrala i prvog izvoda
greške po vremenu
Univerzitet u Novom Sadu,
Fakultet tehničkih nauka, Katedra za Automatiku i upravljanje sistemima
Zakon upravljanja
proporcionalni (
P
) regulator
integralni (
I
) regulator
izvodni (diferencijalni) (
D
) regulator
proporcionalni
–integralni–diferencijalni regulator (
PID
)
Na bazi ove činjenice sledi podela regulatora na:
Univerzitet u Novom Sadu,
Fakultet tehničkih nauka, Katedra za Automatiku i upravljanje sistemima
gre
ška regulacije
y(t)
u(t)
upravljačka
promenljive (ulaz)
upravljana
promenljiva
(izlaz sistema)
referentna
vrednost
r(t)
Upravljanje sistemima sa
otvorenom
povratnom spregom
Regulator
Sistem
y(t)
r(t)
u(t)
Regulator
Sistem
e(t)
zatvorenom
r(t)